参考文献
1. Bernardin, K. Stiefelhagen, R.: Evaluating multiple object tracking performance(2008)
2. Milan, A., Leal-Taixe, L., Reid, I., Roth, S., Schindler, K.: Mot16: A benchmark for multi-object tracking (2016)
3. Luo, H., Gu, Y., Liao, X., Lai, S., Jiang, W.: Bag of tricks and a strong baseline for deep person re-identification (2019)
4. Pan, X., Luo, P., Shi, J., Tang, X.: Two at once: Enhancing learning and generalization capacities via ibn-net (2018)
5. Wang, X., Zhang, X., Zhu, Y., Guo, Y., Yuan, X., Xiang, L., Wang, Z., Ding,G., Brady, D.J., Dai, Q., Fang, L.: Panda: A gigapixel-level human-centric video dataset (2020)
6. Wojke, N., Bewley, A., Paulus, D.: Simple online and realtime tracking with a deep association metric (2017)
7. Yu, F., Li, W., Li, Q., Liu, Y., Shi, X., Yan, J.: Poi: Multiple object tracking with high performance detection and appearance feature (2016)
8. Zhang, Y., Wang, C., Wang, X., Zeng, W., Liu, W.: A simple baseline for multi-object tracking (2020)
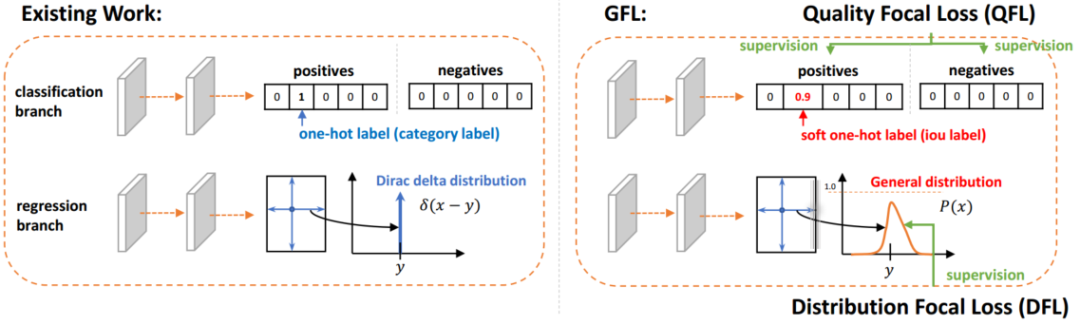
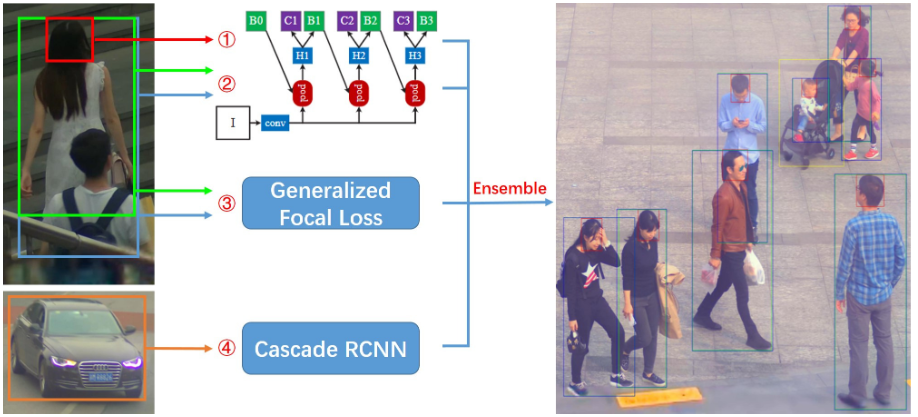
9. Li, X., Wang, W., Wu, L., Chen, S., Hu, X., Li, J., Tang, J., Yang, J.: Generalized focal loss: Learning qualified and distributed bounding boxes for dense object detection. arXiv (2020)
10. Wang, G., Yuan, Y., Chen, X., Li, J., Zhou, X.: Learning discriminative features with multiple granularities for person re-identification. CoRRabs/1804.01438(2018)
11. Cai, Z., Vasconcelos, N.: Cascade r-cnn: Delving into high quality object detection. In: Proceedings of the IEEE conference on computer vision and pattern recognition.pp. 6154–6162 (2018)
12. Cao, Y., Xu, J., Lin, S., Wei, F., Hu, H.: Gcnet: Non-local networks meet squeeze-excitation networks and beyond. In: Proceedings of the IEEE International Conference on Computer Vision Workshops. pp. 0–0 (2019)
13. Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., Wei, Y.: Deformable convolutional networks. In: Proceedings of the IEEE international conference on computer vision. pp. 764–773 (2017)
14. Hu, J., Shen, L., Sun, G.: Squeeze-and-excitation networks. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 7132–7141 (2018)
15. Li, X., Wang, W., Wu, L., Chen, S., Hu, X., Li, J., Tang, J., Yang, J.: Generalized focal loss: Learning qualified and distributed bounding boxes for dense object detection. arXiv preprint arXiv:2006.04388 (2020)
16. Solovyev, R., Wang, W.: Weighted boxes fusion: ensembling boxes for object detection models. arXiv preprint arXiv:1910.13302 (2019)