
线性回归:不能忽视的三个问题
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

线性回归是比较简单的机器学习算法,很多书籍介绍的第一种机器学习算法就是线性回归算法,笔者查阅的中文书籍都是给出线性回归的表达式,然后告诉你怎么求参数最优化,可能部分同学会忽视一些问题,至少笔者忽视了。因此,本文重点介绍了平常容易忽视的三类问题,(1)线性回归的理论依据是什么,(2)过拟合意味着什么。(3)模型优化的方向
目录
1、线性回归的理论依据是什么
2、过拟合意味着什么
3、模型优化的方向
4、总结
线性回归的理论依据
泰勒公式
若函数f(x)在包含x0的某个闭区间[a,b]上具有n阶导数,且在开区间(a,b)上具有(n+1)阶导数,则对闭区间[a,b]上任意一点x,成立下式:


结论:对于区间[a,b]上任意一点,函数值都可以用两个向量内积的表达式近似,其中
 是基函数(basis function),
是基函数(basis function), 是相应的系数。
是相应的系数。
高阶表达式 表示两者值的误差(请回想您学过的线性回归表达式)。
表示两者值的误差(请回想您学过的线性回归表达式)。
傅里叶级数

周期函数f(x)可以用向量内积近似, 表示基函数,
表示基函数, 表示相应的系数,
表示相应的系数, 表示误差。
表示误差。
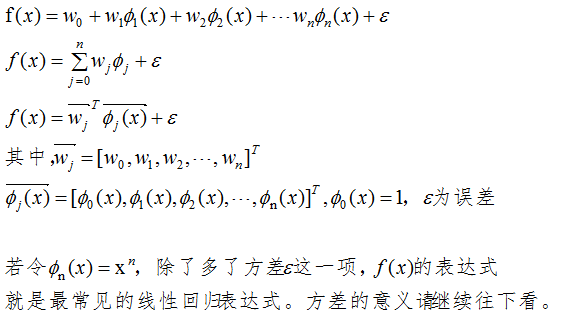
线性回归
由泰勒公式和傅里叶级数可知,当基函数的数量足够多时,向量内积无限接近于函数值。线性回归的向量内积表达式如下:
过拟合定义
构建模型的训练误差很小或为0,测试误差很大,这一现象称为过拟合。
高斯噪声数据模型
我们采集的样本数据其实包含了噪声,假设该噪声的高斯噪声模型,均值为0,方差为 。
。
若样本数据的标记为y1,理论标记为y,噪声为η,则有:
y1 = y + η,(其中,η是高斯分布的抽样)
上节的线性回归表达式的方差 表示的意义是噪声高斯分布的随机抽样,书本的线性回归表达式把方差也包含进去了。
表示的意义是噪声高斯分布的随机抽样,书本的线性回归表达式把方差也包含进去了。
过拟合原因
数学术语:当基函数的个数足够大时,线性回归表达式的方程恒相等。
如下图:

机器学习术语:模型太过复杂以致于把无关紧要的噪声也学进去了。
当线性回归的系数向量间差异比较大时,则大概率设计的模型处于过拟合了。用数学角度去考虑,若某个系数很大,对于相差很近的x值,结果会有较大的差异,这是较明显的过拟合现象。
过拟合的解决办法是降低复杂度,后期会有相应的公众号文章,请继续关注。
模型的不同主要是体现在参数个数,参数大小以及正则化参数λ,优化模型的方法是调节上面三个参数(但不仅限于此,如核函数),目的是找到最优模型。
本文通过泰勒公式和傅里叶级数的例子说明线性回归的合理性,线性回归表达式包含了方差项,该方差是高斯噪声模型的随机采样,若训练数据在线性回归的表达式恒相等,那么就要考虑过拟合问题了,回归系数间差异比较大也是判断过拟合的一种方式。模型优化的方法有很多种,比较常见的方法是调节参数个数,参数大小以及正则化参数λ。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~