
无需NMS、二分匹配的一阶段端到端目标检测网络,港大提出OneNet | 附源码
点击上方“AI算法与图像处理”,选择加"星标"或“置顶”
重磅干货,第一时间送达
作者丨孙培泽@知乎
来源丨https://zhuanlan.zhihu.com/p/336016003
编辑丨极市平台
导读
由于各种复杂的layer的存在不容易部署,而one-stage在工业应用中有着更大的潜力,作者团队提出了OneNet,首次实现了end-to-end dense detector without NMS。本文详细解释了OneNet的相关架构及优势,并给出了相关实验的结果表格:OneNet在标准的COCO benchmark上达到了37.7 AP / 50 FPS,35.0 AP / 80 FPS。
本文介绍一下我们最近的工作:
OneNet: Towards End-to-End One-Stage Object Detection
现有的one-stage detectors的label assign,都只用到了位置信息(location),如box IoU(e.g.,YOLO, RetinaNet), point distance(e.g.,FCOS, CenterNet)。但是目标检测是分类(classification)和定位(location)的联合任务,只考虑位置信息的label assign和网络的优化目标存在着非常大的misalignment,导致冗余的高分检测框,从而需要NMS后处理。
我们提出了OneNet,首次实现了end-to-end dense detector without NMS。OneNet的样本匹配策略是Minimum Cost Assign: cost定义为样本与gt的分类距离(classification cost)和位置距离(location cost)之和; 正样本是所有样本中和gt的cost最小的样本,其他都是负样本。我们发现,classification cost是去除NMS的关键;没有classification cost会导致冗余的高分检测框,从而需要NMS后处理。OneNet在标准的COCO benchmark上达到了37.7 AP / 50 FPS,35.0 AP / 80 FPS。
Paper: http://arxiv.org/abs/2012.05780
Code: https://github.com/PeizeSun/OneNet
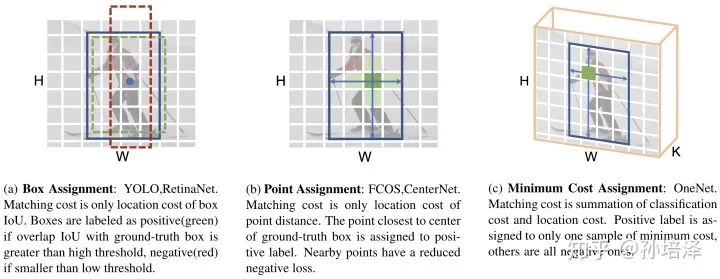
图1 不同的样本匹配策略
1. 简介
现有的end-to-end的目标检测模型都是two-stage或者multiple-stage (如: DETR,Deformable DETR,Sparse R-CNN)。这些模型的检测性能很好,但是由于各种复杂的layer的存在不容易部署,而one-stage在工业应用中有着更大的潜力。我们提出了OneNet:end-to-end one-stage object detector。
OneNet的优势是:
整个网络是全卷积的,没有各种非常规的layer(比如GN,RoI-Align,Dynamic Conv)。
无需Non-Maximum Suppression(NMS)后处理或者self-attention模块。
样本匹配策略是简单的Minimum Cost,无需启发式规则或者复杂的最优二分匹配。
cost定义为样本与gt的classification cost和location cost之和。
我们发现,classification cost是实现end-to-end的关键。而回顾之前的dense detector样本匹配策略,都是只有location cost,如box IoU(e.g.,YOLO, RetinaNet), point distance(e.g.,FCOS, CenterNet)。只有location cost的样本匹配策略会导致冗余的高分检测框(图4),从而需要NMS后处理去除这些冗余框。
2. OneNet
输入图片(H×W×3),backbone产生feature map(H/4×W/4×C),head预测分类(H/4×W/4×K)和回归(H/4×W/4×4), 最后的输出直接取top-k高分框。
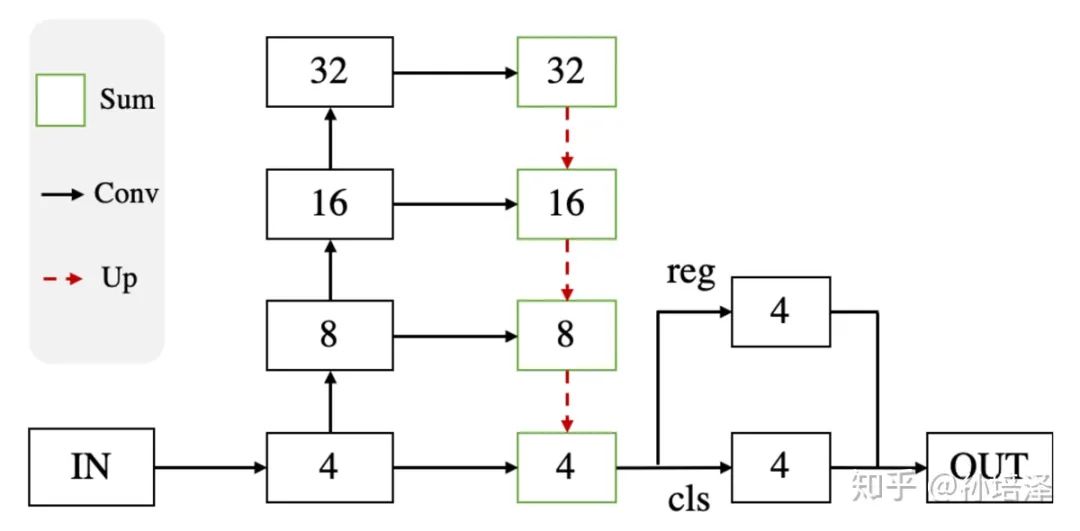
图2 OneNet pipeline
Backbone: Backbone是先bottom-up再top-down的结构。其中,bottom-up结构是resnet,top-down结构是FPN。我们实现了两种FPN,一种是上采样中引入deformable conv,为了追求较高检测精度;一种是普通conv,方便工业部署。
Head: Head是两个并行的conv,分类conv预测类别,回归conv预测到物体框的4个边界的距离。
Output: 直接取top-k高分框,没有NMS,也没有类似CenterNet中max-pooling的操作。
样本匹配策略:OneNet的样本匹配策略是一种基于minimum cost的异常简单的方法,没有启发式规则,也没有最优二分匹配。cost定义为样本与gt的classification cost和location cost之和,具体定义是:

L_cls是分类focal loss, L_l1和L_giou是预测框和gt框归一化后的l1 loss和giou loss。lambda是系数。
对每个gt,正样本是和gt的cost最小的样本,其他都是负样本。伪代码如下:
# C is cost matrix, shape of (nr_sample, nr_gt)
C = cost_class + cost_l1 + cost_giou
# Minimum cost, src_ind is index of positive sample
_, src_ind = torch.min(C, dim=0)
tgt_ind = torch.arange(nr_gt)3. 实验
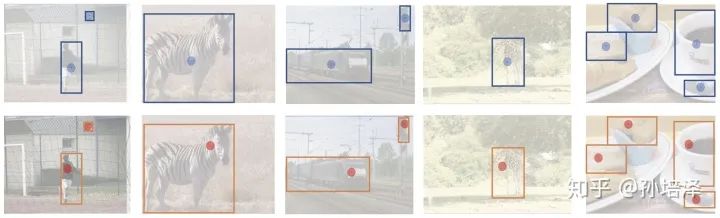
图3 only location cost(1st row)和location cost+classification cost(2nd row)的正样本。实际正样本是一个点,图中被高亮圈突出,以便更好的可视化。
图3给出了只考虑location cost和综合考虑location cost+classification cost的正样本。只考虑location cost时,正样本是离物体框中心最近的样本点。这样的正样本有利于定位,但是对分类并不友好,如:第一个case的人体姿态导致正样本点落在人体边缘,这并不是较优的选择。综合考虑location cost+classification cost的正样本,一般落在物体的更具辨别性的区域,如:人体内部,斑马头部。这样的正样本有利于分类,同时对定位也较为友好(毕竟正样本点依然在物体框内部)。

表1 Effect of label assignment
表1中的4个实验都是one-to-one的样本匹配策略。其中第一个实验的location cost是指feature map中point的位置到物体gt center的位置的距离(可以理解为CenterNet只有高斯极值点为1,其他都是0)。从表1可以看出,classification cost是去掉NMS的关键。而回想绝大多数的样本匹配策略,如,box IoU,point distance,都是只考虑了location cost。第三个实验如此拉胯的原因可能是因为predicted box是变化的,会导致正负样本来回横跳,训练低效。
图4给出了表1中的4个实验的可视化图,可以看到,没有classification cost的模型会预测出冗余的高分检测框,需要NMS后处理来去除这些冗余框。而引入classification cost的模型消除了冗余框。
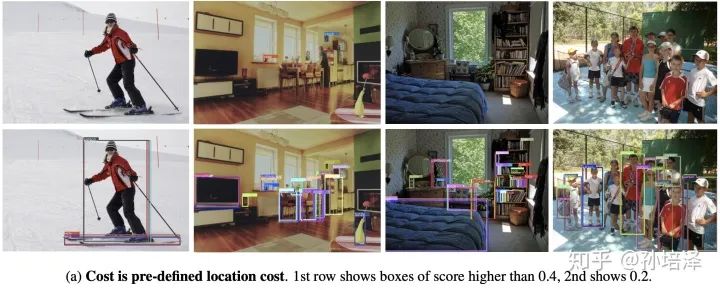
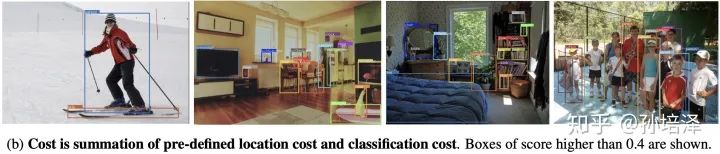
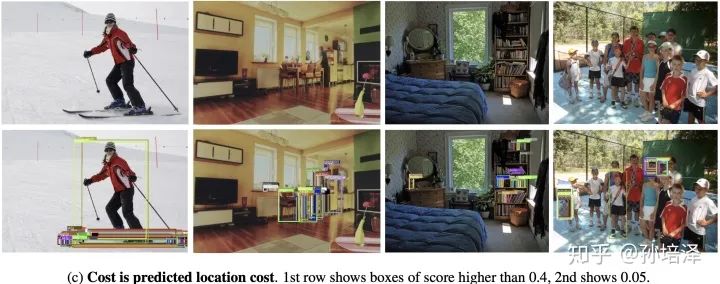

图4 表1中的4个对比实验的可视化图
表2 给出了OneNet和CenterNet的比较。OneNet在检测精度和推理速度都展现出comparable的性能。这证明OneNet有效去除了NMS,成功实现了end-to-end。
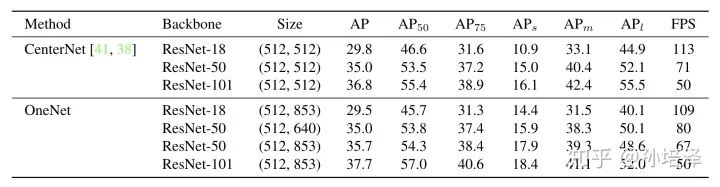
表2 OneNet和CenterNet的比较
4. 讨论
一年前,在anchor-free和label assignment的那波研究中,曾经考虑过one-to-one的样本匹配策略,表1第一行的实验也做过了,性能也是只有AP 20+(加上NMS 30+)。当时自我解释的原因是:某一位置如果分类是1,那么这一位置的周围位置很难突变成0。
最近DETR出现了,在样本匹配中同时考虑location cost和classification cost,成功做出了end-to-end two-stage(multiple-stage)。这给人启发end-to-end one-stage是不是也需要引入classification cost。表1第一行的实验简单地加上classification cost(即表1第二行实验)竟然神奇地work了!甚至optimal bipartite matching也不需要,直接全图找最小cost的样本就行。可能optimal bipartite matching也可以做,但是在dense detector中太慢了。
我们也进一步验证了classification cost是否对sparse detectors的end-to-end也至关重要。从表3可以看出,classification cost也是sparse detectors实现end-to-end的关键。

表3 Effect of label assignment on sparse detectors
我们的工作提出了很多较为本质的问题:为什么引入classification cost能够使得相邻的feature map points的分类发生突变?样本之间的交互(例如max-pooling, self-attention)对于e2e是否必须?这些问题都值得后续深入研究。
5. 彩蛋
设计OneNet的初衷是推广end-to-end detectors的工业应用。我们会在接下来的时间实现OneNet的部署代码,加入git repo中,欢迎大家届时关注和使用。
下载1:何恺明顶会分享
在「AI算法与图像处理」公众号后台回复:何恺明,即可下载。总共有6份PDF,涉及 ResNet、Mask RCNN等经典工作的总结分析
下载2:leetcode 开源书
在「AI算法与图像处理」公众号后台回复:leetcode,即可下载。每题都 runtime beats 100% 的开源好书,你值得拥有!
下载3 CVPR2020
在「AI算法与图像处理」公众号后台回复:CVPR2020,即可下载1467篇CVPR 2020论文
个人微信(如果没有备注不拉群!)
请注明:地区+学校/企业+研究方向+昵称
觉得不错就点亮在看吧

评论