探究Integral Pose Regression性能不足的原因
极市导读
这篇工作深入分析了Integral Pose Regression的问题,并提出了一个解决方案,虽然没有提出什么fancy的结构,却能让我们对于过去习以为常的做法更加深入理解。实验也从不同角度对Heatmp和Regression方法的优劣进行了探索,希望给大家也能带来一些思考和启发 >>加入极市CV技术交流群,走在计算机视觉的最前沿
论文标题:Removing the Bias of Integral Pose Regression
论文链接:https://openaccess.thecvf.com/content/ICCV2021/papers/Gu_Removing_the_Bias_of_Integral_Pose_Regression_ICCV_2021_paper.pdf
补充材料链接:Gu_Removing_the_Bias_ICCV_2021_supplemental.pdf (thecvf.com)
小伙伴介绍的一篇ICCV 2021的文章,作者深入分析了Integral Pose Regression的问题,并提出了一个解决方案,虽然没有提出什么fancy的结构,却能让我们对于过去习以为常的做法更加深入理解,我个人很喜欢这种性质的文章。本文实验相当翔实,从不同角度对Heatmp和Regression方法的优劣进行了探索,其中很多结论都让我获益匪浅。
并且,由于本文提出的方法足够简单,所以在理解后根本不需要开源就能很容易加入到我们的代码中使用。
0. 前言
Integral Pose Regression是DSNT方法提出来以后一个较为完整的实验工作,不仅将DSNT在各个数据集上的实验补齐,还利用DSNT的特性进一步扩展到了3D任务上,让2D和3D数据可以联合训练。
所谓DSNT,或者说Integral Pose Regression方法,其实就是对特征图进行归一化后求期望来获得坐标值的方法,是对Heatmap-based方法后处理时Argmax不可导问题的一个解决方案,将Argmax软化为可微分的Soft-Argmax,进而实现了端到端训练,使得坐标值可以直接监督网络训练。
更多的细节我在Sampling-Argmax这篇文章中进行了详细介绍,有兴趣的小伙伴可以前往阅读。
在本文的工作中,作者将Heatmap-based方法总结为一种检测任务:网络输出的是二维平面上的概率分布,在标准的做法里,这个概率分布图的解码方式是通过Argmax操作来进行的:
由于Argmax操作不可导,使得训练无法端到端进行,网络的输出还需要进行后处理,于是Integral Pose Regression通过Soft-Argmax替换了Argmax,通常来说,会对网络输出的Heatmap经过一次Softmax归一化,然后计算期望:
需要注意的是, 一般我们常用的softmax是没有使用参数 的, 它可以起到平滑作用, 越小时 softmax的结果越“扁平", 越大则结果越“尖锐”, 正常情况下, 我们默认取 所以没有写出来。
1. Softmax的问题
一般来说,Softmax后计算期望,能够得到一个非常近似Argmax的值,这是一个很自然的过程,而且更妙的是,由于期望并不一定是整数,Soft-Argmax甚至能避开Argmax方法由于输出特征图尺寸过小带来的量化误差影响,这听上去很美好。
然而大家都知道的现实是Soft-Argmax方法虽然确实在小分辨率特征图输出上,能略胜Heatmap方法一筹,但一旦输出分辨率够高,性能就远远不如了。
那么我们很自然地就要问一句,为什么?
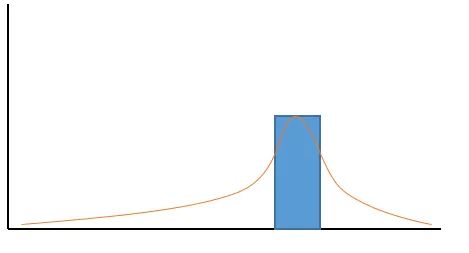
本文揭示了Softmax的一个性质:倾向于让每一项的值都非零。简单来说,对于一个非常尖锐的分布(比如one-hot),Softmax会将其软化,变成一个渐变的分布,也就是说,原本取值为0的项,会被Softmax赋上一个非零的值,尽管这个值也许非常小,非常接近于0,但它是非零的。
从图像上来看,概率分布图会出现一个长长的非零的尾巴。 而当我们计算概率分布的期望时,这些原本为0,现在非零的项,就都会为期望值的计算“贡献自己的一份力”(os:大可不必)
那么,很自然地,输入特征图上响应值的大小,就会对Softmax的结果起到影响了,因为假如响应值是一个接近0的数字,那么Softmax之后的分布,原本为0的项,跟非0项的值会非常接近。
这个性质导致的结果是,最后计算得到的期望值会不准确。只有响应值足够大,分布足够尖锐的时候,期望值才接近Argmax结果,一旦响应值小,分布平缓,期望值会趋近于中心位置。
这里我用一段简单的代码来实验:
# 定义一个一维的长度为10的分布
a = torch.zeros((10, ))
# 在第8项上设置响应
target_idx = 8
a[target_idx] = 10
print('dist:\n', a)
# 进行softmax归一化
softmax_res = a.softmax(0)
print('after softmax:\n', softmax_res)
# 求期望值
lin = torch.tensor([x for x in range(10)])
expectation = (lin * softmax_res).sum()
print('expectation:\n', expectation)
tensor([ 0., 0., 0., 0., 0., 0., 0., 0., 10., 0.])
after softmax:
tensor([4.5381e-05, 4.5381e-05, 4.5381e-05, 4.5381e-05, 4.5381e-05, 4.5381e-05, 4.5381e-05, 4.5381e-05, 9.9959e-01, 4.5381e-05])
expectation:
tensor(7.9984)
可以看到,当响应值取10时,估计的期望值为7.998,是非常接近8的。
但假如我们把响应值改为1:
# 定义一个一维的长度为10的分布
a = torch.zeros((10, ))
# 在第8项上设置响应
target_idx = 8
a[target_idx] = 1
print('dist:\n', a)
# 进行softmax归一化
softmax_res = a.softmax(0)
print('after softmax:\n', softmax_res)
# 求期望值
lin = torch.tensor([x for x in range(10)])
expectation = (lin * softmax_res).sum()
print('expectation:\n', expectation)
tensor([0., 0., 0., 0., 0., 0., 0., 0., 1., 0.])
after softmax:
tensor([0.0853, 0.0853, 0.0853, 0.0853, 0.0853, 0.0853, 0.0853, 0.0853, 0.2320, 0.0853])
expectation:
tensor(5.0132)
期望值顿时就不尽如人意了。
更进一步讲,这里的“尖锐”与否,实际上是与分布的长度相关的,这很好理解,某个高楼大厦放在某个地区来看,它是高楼,但如果是用中国地图来看,它也许只是一个不起眼的小突起了。Softmax的性质会把它原本突起的力量发散给所有的非零项,所以输出特征图分辨率越大的时候,所需要的响应强度也越大,否则期望值就可能因为“响应不够强”而趋近于中央。
2. naive solution
在发现Softmax这个性质后, 作者先想到了一个朴素的解决方案, 也就是我们上面专门提到的 , 通过调整 , 我们可以控制Softmax输出的分布的尖锐与否, 只要 足够大, 是能够让期望估计值重新回到准确的。
本文实验可视化如下:
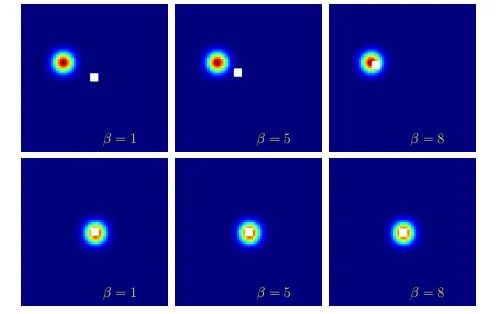
图中的圆圈为特征图响应值,白色的点为计算得到的期望值,可以看到随着增大,期望值逐渐去到了响应值最大点。
然而问题当然不会这么简单,取值越来越大,当趋近无穷大时,Softmax就会收敛到Argmax形式,函数就变成不可导了。并且,随着它增大,远离中心点的像素上的梯度也会变小,直到消失。 因此在实际应用中,我们不得不进行trade-off,并且这个最优的参数值很难把握。
于是本文又继续思考新的解决方案。
3. Bias Compensation
我们其实已经定位了问题根源所在,Soft-Argmax方法不准是因为响应值不够大时,期望值趋近于中央,而期望值趋近于中央的原因在于,Softmax后出现的那条多余的长长的尾巴,更气人的是,这个尾巴通过只能尽可能地缩小,无法消除,甚至在这个过程中还会产生副作用(回传导数消失)。
那么,我们是不是可以换个思路,既然这个尾巴消除不了,我们干脆把它求出来,然后从结果期望值里减去,这不就相当于“切掉”了这个尾巴吗?
具体而言,假设响应值是符合高斯分布的,我们可以根据响应最大值点两倍的宽度,把特征图划分成四个区域:
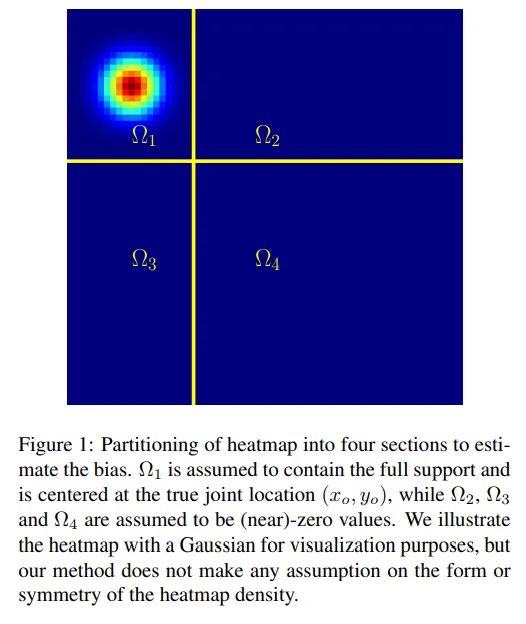
我们知道一旦经过Softmax,原本都是0值的2、3、4象限区域瞬间就会被长长的尾巴填满,而对于第1象限区域,由于响应值正处于区域的中央,因此不论响应值大小,该区域的估计期望值都会是准确的。
让我们回到Softmax公式:
为了简洁,我们先把分母部分用C来表示:
由于假设 区域的响应值都为 0 , 因而分子部分计算出来为 1 , 划分区域后的Softmax结 果可以表示成:
然后继续按照Soft-Argmax的计算公式带入, 期望值的计算可以表示为:
即:第一区域的期望值, 加上另外三个区域的期望值。
已知2、3、4区域 , 因此这三个区域的期望值可以把 提出来, 只剩下
而这里的求和,在几何意义上等价于该区域的中心点坐标乘以该区域的面积, 我给一个简单的 演示, 对于 区间:
因而对于整块特征图的期望值, 又可以看成四个区域中心点坐标的加权和:
由于四个区域的中心点存在对称性, 假设第一区域中心点坐标为 , 那么剩下三个区域中心点坐标为
对应上面我们得出的 乘以中心点坐标乘以面积, 就得到了每个加权值:
带入上面的加权和公式(6),整张特征图的期望值可以表示为:
由于已知四个区域权重相加为 1 , 所以有 , 因此整张特征图期望值化简成如下形式:
由于 值可以很容易通过对整张图计算Soft-Argmax得到, 因此对公式(9)移项就能得到准确的第一区域中心点坐标:
这一步就相当于将原本多余的长尾从期望值中减去了, 对该公式我们还可以进一步分析, 整张 图的期望估计值相当于第一区域期望值的一个偏移, 当C足够大时, 和 是趋近于相等的。
又因为C中是包含 的, 因此我们最初通过 来优化结果的本质其实也是在调节C的大小:
另外我们可以发现,公式(10)是与区域位置无关的,并且不需要用到任何的Gound Truth信息,因此不论是训练还是推理阶段,都可以直接计算准确的坐标值。
至此,本文最核心的方法就介绍完了。
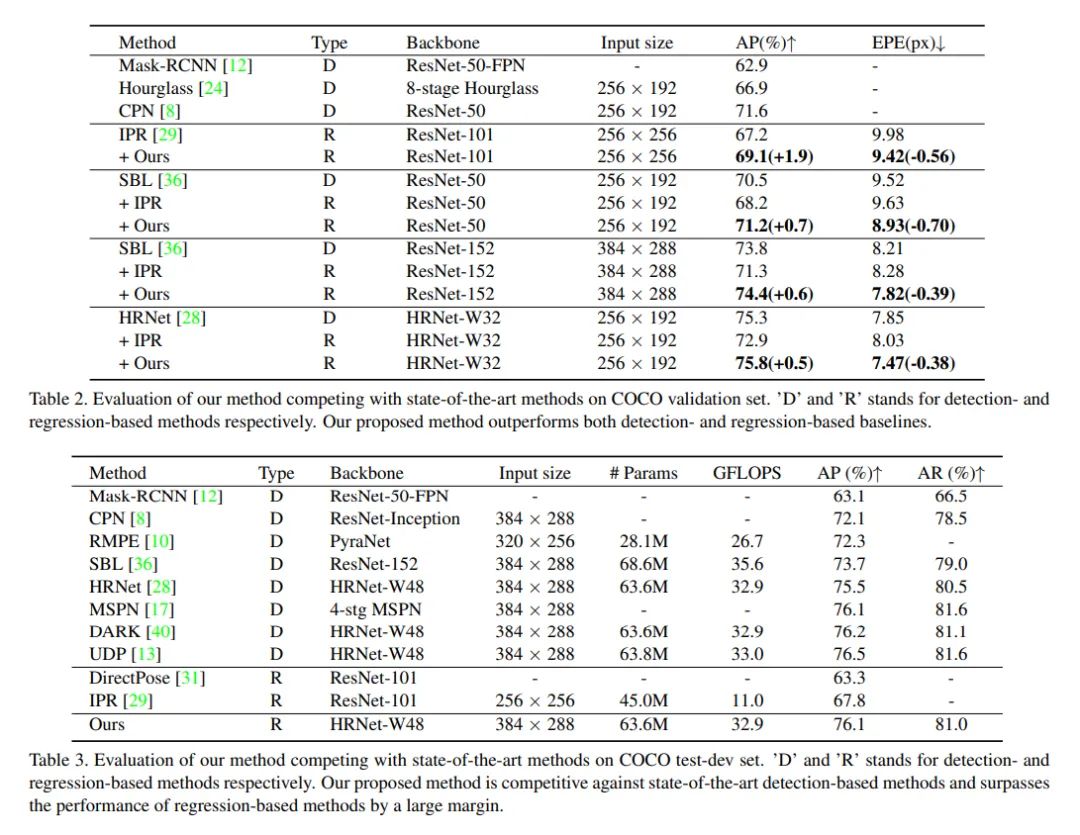
4.实验结果
经过实验可以看到,本文提出的方法对于Integral Pose Regression有显著提升,能追平甚至超越Heatmap-based方法:
本文做的其他几个实验我觉得是比较有意思的,很值得我们关注。
本文对数据集进行了进一步的精细化分,按照关键点个数、遮挡率、输入尺寸等多个角度来评估不同方法的表现,这是非常科学且严谨的,能帮助我们看清不同方法的优势和劣势。
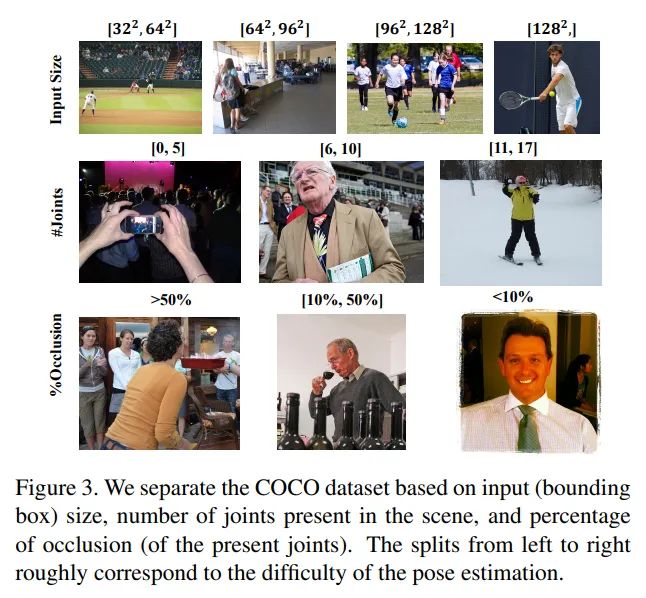
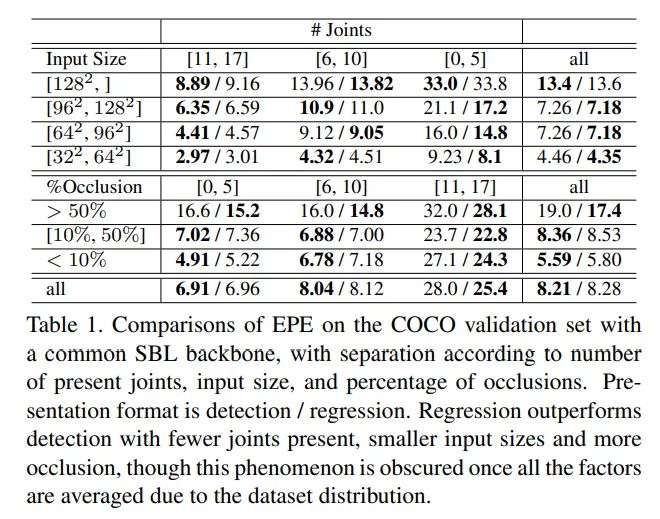
从该实验结果我们可以得出以下结论:
Heatmap-based方法在输入尺寸大、遮挡少的情况下表现更佳 Regression-based方法在输入尺寸小、遮挡多的情况表现更佳 当对象被画面截断时,画面中出现的关键点数少时,Heatmap-based方法更有优势
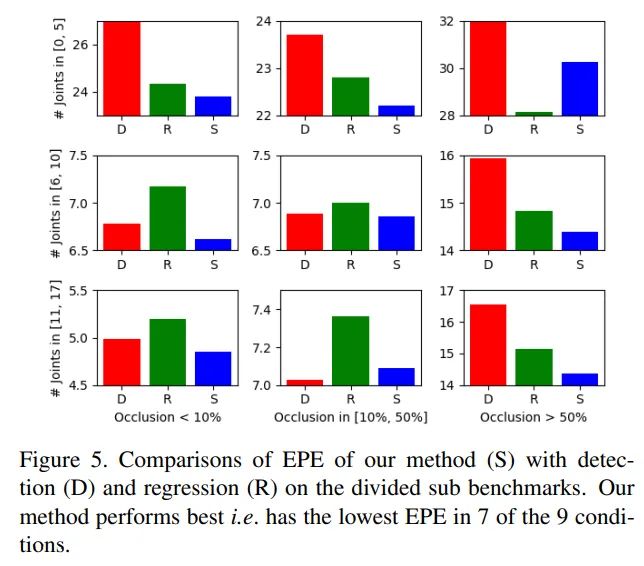
加入本文提出的修正方法后,在任何情况下模型均能取得更好的表现:
关于Heatmap和Regression不同的监督方式对于训练速度的影响,本文也进行了实验探索:
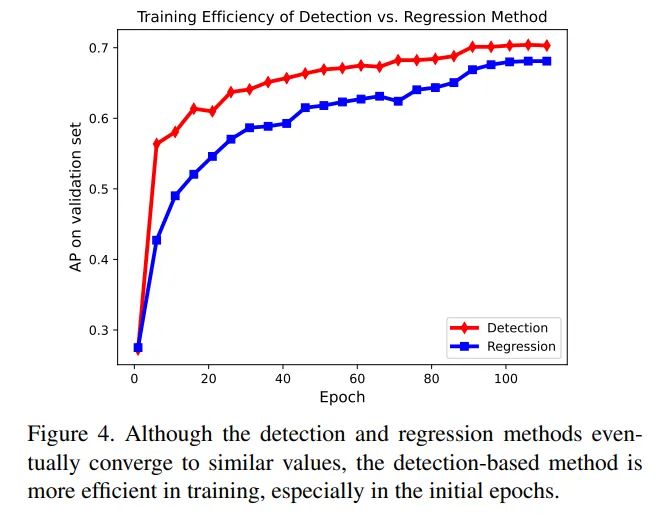
首先是可以观察到,尽管两种方法最终取得的精度相差不大,但训练效率上却有显著差异,Heatmap监督的方法在训练初期提升非常迅速。本文分析其原因在于,Heatmap的监督信息非常明确,而Regression方法由于只依赖期望值的监督,对概率分布的性质没有约束,因此存在歧义性影响了模型学习,这部分的结论在我之前介绍的Sampling-Argmax文章中进行了深入分析,并且提出了更优的解决方案。
随后本文提出了一种监督策略,将两种监督信息进行了混合,Heatmap作为辅助loss,并随着训练的进行逐渐降低其权重:
实验结果如下:
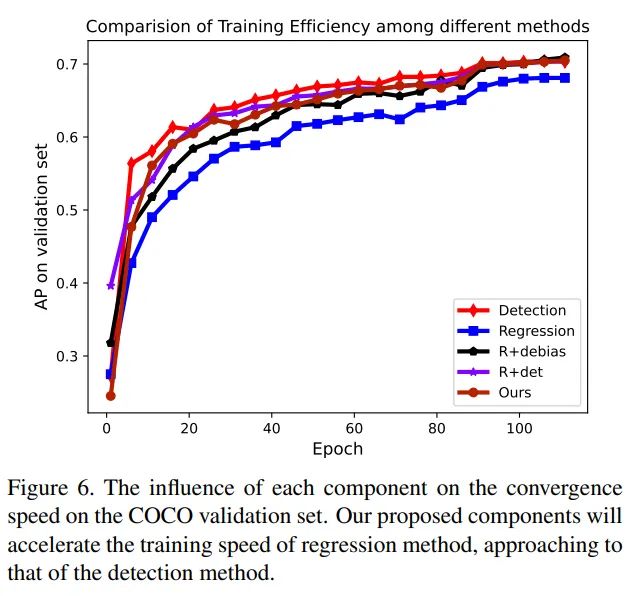
另外一个合适的值在本文的方法基础上还能带来进一步的收益:
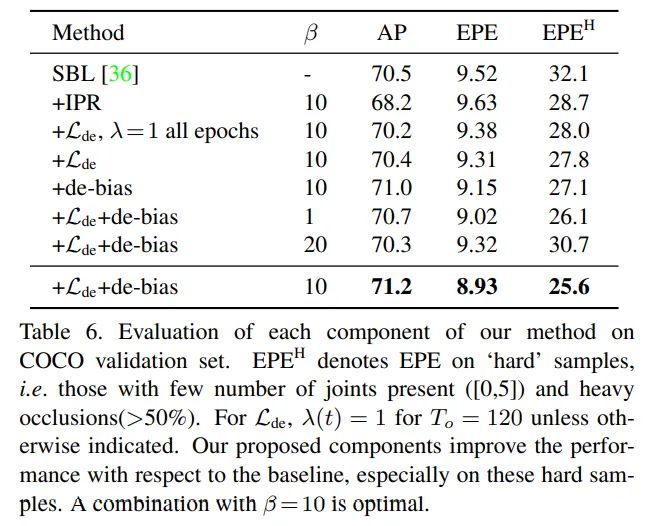
而的使用也非常简单,只需要对代码做一点点修改:
x = x.softmax() # original
x = (10 * x).softmax() # new
5. 结语
本文深入分析了Softmax的性质,找到了其中的问题,挖掘出Soft-Argmax方法性能不足的原因,并通过数学方式进行了修正,使得Regression方法获得了巨大的性能提升,并且做了大量的实验来对比分析,为我们自己的模型训练提供了可以参考的经验,我认为是一篇非常优秀的工作。
公众号后台回复“CVPR 2022”获取论文合集打包下载~

# CV技术社群邀请函 #

备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~