
【深度强化学习】DQN训练超级玛丽闯关
上一期 MyEncyclopedia公众号文章 通过代码学Sutton强化学习:从Q-Learning 演化到 DQN,我们从原理上讲解了DQN算法,这一期,让我们通过代码来实现DQN 在任天堂经典的超级玛丽游戏中的自动通关吧。本系列将延续通过代码学Sutton 强化学习系列,逐步通过代码实现经典深度强化学习应用在各种游戏环境中。本文所有代码在
https://github.com/MyEncyclopedia/reinforcement-learning-2nd/tree/master/super_mario
最终训练第一关结果动画
DQN 算法回顾
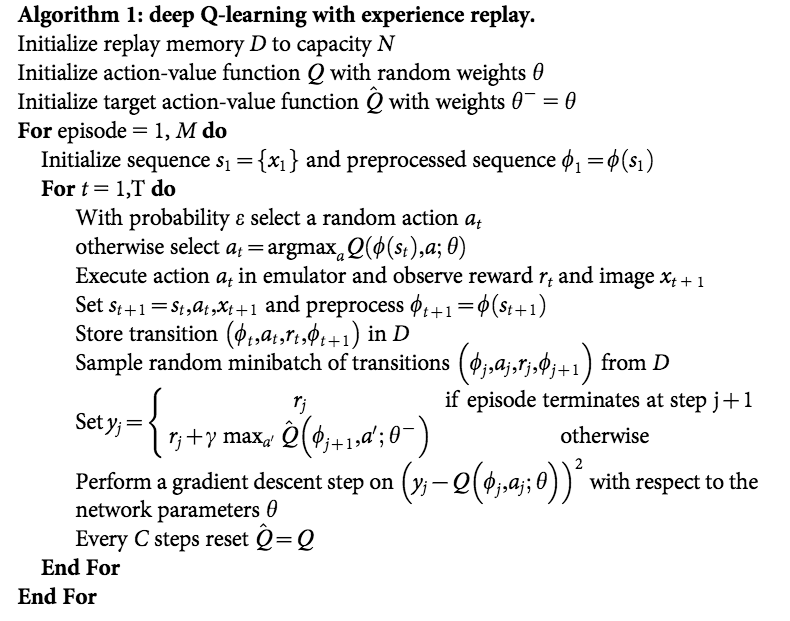
上期详细讲解了DQN中的两个重要的技术:Target Network 和 Experience Replay,正是有了它们才使得 Deep Q Network在实战中容易收敛,以下是Deepmind 发表在Nature 的 Human-level control through deep reinforcement learning 的完整算法流程。
超级玛丽 NES OpenAI 环境
安装基于OpenAI gym的超级玛丽环境执行下面的 pip 命令即可。
pip install gym-super-mario-bros
我们先来看一下游戏环境的输入和输出。下面代码采用随机的action来和游戏交互。有了 组合游戏系列3: 井字棋、五子棋的OpenAI Gym GUI环境 关于OpenAI Gym 的介绍,现在对于其基本的交互步骤已经不陌生了。
import gym_super_mario_bros
from random import random, randrange
from gym_super_mario_bros.actions import RIGHT_ONLY
from nes_py.wrappers import JoypadSpace
from gym import wrappers
env = gym_super_mario_bros.make('SuperMarioBros-v0')
env = JoypadSpace(env, RIGHT_ONLY)
# Play randomly
done = False
env.reset()
step = 0
while not done:
action = randrange(len(RIGHT_ONLY))
state, reward, done, info = env.step(action)
print(done, step, info)
env.render()
step += 1
env.close()
随机策略的效果如下
注意我们在游戏环境初始化的时候用了参数 RIGHT_ONLY,它定义成五种动作的list,表示仅使用右键的一些组合,适用于快速训练来完成Mario第一关。
RIGHT_ONLY = [
['NOOP'],
['right'],
['right', 'A'],
['right', 'B'],
['right', 'A', 'B'],
]
观察一些 info 输出内容,coins表示金币获得数量,flag_get 表示是否取得最后的旗子,time 剩余时间,以及 Mario 大小状态和所在的 x,y位置。
{
"coins":0,
"flag_get":False,
"life":2,
"score":0,
"stage":1,
"status":"small",
"time":381,
"world":1,
"x_pos":594,
"y_pos":89
}
游戏图像处理
Deep Reinforcement Learning 一般是 end-to-end learning,意味着将游戏的 screen image,即 observed state 直接视为真实状态 state,喂给神经网络去训练。于此相反的另一种做法是,通过游戏环境拿到内部状态,例如所有相关物品的位置和属性作为模型输入。这两种方式的区别在我看来有两点。第一点,用观察到的屏幕像素代替真正的状态 state,在partially observable 的环境时可能因为 non-stationarity 导致无法很好的工作,而拿内部状态利用了额外的作弊信息,在partially observable环境中也可以工作。第二点,第一种方式屏幕像素维度比较高,输入数据量大,需要神经网络的大量训练拟合,第二种方式,内部真实状态往往维度低得多,训练起来很快,但缺点是因为除了内部状态往往还需要游戏相关规则作为输入,因此generalization能力不如前者强。
这里,我们当然采样屏幕像素的 end-to-end 方式了,自然首要任务是将游戏帧图像有效处理。超级玛丽游戏环境的屏幕输出是 (240, 256, 3) shape的 numpy array,通过下面一系列的转换,尽可能的在不影响训练效果的情况下减小采样到的数据量。
MaxAndSkipFrameWrapper:每4个frame连在一起,采取同样的动作,降低frame数量
FrameDownsampleWrapper:将原始的 (240, 256, 3) down sample 到 (84, 84, 1)
ImageToPyTorchWrapper:转换成适合 pytorch 的 shape (1, 84, 84)
FrameBufferWrapper:保存最后4次屏幕采样
NormalizeFloats:Normalize 成 [0., 1.0] 的浮点值
def wrap_environment(env_name: str, action_space: list) -> Wrapper:
env = make(env_name)
env = JoypadSpace(env, action_space)
env = MaxAndSkipFrameWrapper(env)
env = FrameDownsampleWrapper(env)
env = ImageToPyTorchWrapper(env)
env = FrameBufferWrapper(env, 4)
env = NormalizeFloats(env)
return env
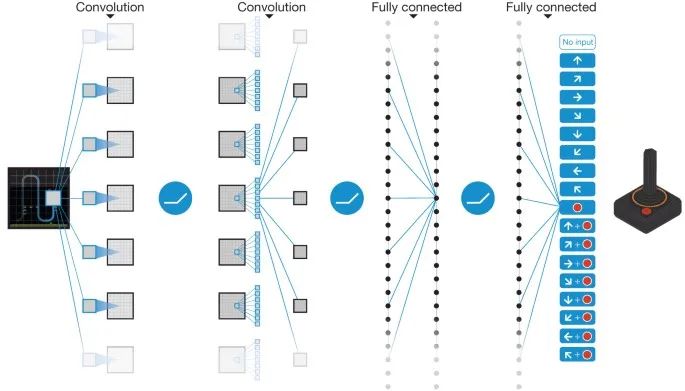
CNN 模型
模型比较简单,三个卷积层后做 softmax输出,输出维度数为离散动作数。act() 采用了epsilon-greedy 模式,即在epsilon小概率时采取随机动作来 explore,大于epsilon时采取估计的最可能动作来 exploit。
class DQNModel(nn.Module):
def __init__(self, input_shape, num_actions):
super(DQNModel, self).__init__()
self._input_shape = input_shape
self._num_actions = num_actions
self.features = nn.Sequential(
nn.Conv2d(input_shape[0], 32, kernel_size=8, stride=4),
nn.ReLU(),
nn.Conv2d(32, 64, kernel_size=4, stride=2),
nn.ReLU(),
nn.Conv2d(64, 64, kernel_size=3, stride=1),
nn.ReLU()
)
self.fc = nn.Sequential(
nn.Linear(self.feature_size, 512),
nn.ReLU(),
nn.Linear(512, num_actions)
)
def forward(self, x):
x = self.features(x).view(x.size()[0], -1)
return self.fc(x)
def act(self, state, epsilon, device):
if random() > epsilon:
state = torch.FloatTensor(np.float32(state)).unsqueeze(0).to(device)
q_value = self.forward(state)
action = q_value.max(1)[1].item()
else:
action = randrange(self._num_actions)
return action
Experience Replay 缓存
实现采用了 Pytorch CartPole DQN 的官方代码,本质是一个最大为 capacity 的 list 保存了采样到的 (s, a, r, s', is_done) 五元组。
Transition = namedtuple('Transition', ('state', 'action', 'reward', 'next_state', 'done'))
class ReplayMemory:
def __init__(self, capacity):
self.capacity = capacity
self.memory = []
self.position = 0
def push(self, *args):
if len(self.memory) < self.capacity:
self.memory.append(None)
self.memory[self.position] = Transition(*args)
self.position = (self.position + 1) % self.capacity
def sample(self, batch_size):
return random.sample(self.memory, batch_size)
def __len__(self):
return len(self.memory)
DQNAgent
我们将 DQN 的逻辑封装在 DQNAgent 类中。DQNAgent 成员变量包括两个 DQNModel,一个ReplayMemory。
train() 方法中会每隔一定时间将 Target Network 的参数同步成现行Network的参数。在td_loss_backprop()方法中采样 ReplayMemory 中的五元组,通过minimize TD error方式来改进现行 Network 参数 。Loss函数为:
class DQNAgent():
def act(self, state, episode_idx):
self.update_epsilon(episode_idx)
action = self.model.act(state, self.epsilon, self.device)
return action
def process(self, episode_idx, state, action, reward, next_state, done):
self.replay_mem.push(state, action, reward, next_state, done)
self.train(episode_idx)
def train(self, episode_idx):
if len(self.replay_mem) > self.initial_learning:
if episode_idx % self.target_update_frequency == 0:
self.target_model.load_state_dict(self.model.state_dict())
self.optimizer.zero_grad()
self.td_loss_backprop()
self.optimizer.step()
def td_loss_backprop(self):
transitions = self.replay_mem.sample(self.batch_size)
batch = Transition(*zip(*transitions))
state = Variable(FloatTensor(np.float32(batch.state))).to(self.device)
action = Variable(LongTensor(batch.action)).to(self.device)
reward = Variable(FloatTensor(batch.reward)).to(self.device)
next_state = Variable(FloatTensor(np.float32(batch.next_state))).to(self.device)
done = Variable(FloatTensor(batch.done)).to(self.device)
q_values = self.model(state)
next_q_values = self.target_net(next_state)
q_value = q_values.gather(1, action.unsqueeze(-1)).squeeze(-1)
next_q_value = next_q_values.max(1)[0]
expected_q_value = reward + self.gamma * next_q_value * (1 - done)
loss = (q_value - expected_q_value.detach()).pow(2)
loss = loss.mean()
loss.backward()
外层控制代码
最后是外层调用代码,基本和以前文章一样。
def train(env, args, agent):
for episode_idx in range(args.num_episodes):
episode_reward = 0.0
state = env.reset()
while True:
action = agent.act(state, episode_idx)
if args.render:
env.render()
next_state, reward, done, stats = env.step(action)
agent.process(episode_idx, state, action, reward, next_state, done)
state = next_state
episode_reward += reward
if done:
print(f'{episode_idx}: {episode_reward}')
break
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
往期精彩回顾
获取本站知识星球优惠券,复制链接直接打开:
https://t.zsxq.com/qFiUFMV
本站qq群704220115。
加入微信群请扫码: