大狗拉小狗:山大呆萌仿生机器狗学会爬楼梯了!2万多带回家

新智元报道
来源:科技日报、机器人网等
【新智元导读】近日,山东大学机器人研究中心对外发布了一款高性能四足仿生机器狗,这是全球首款轻量级电驱动仿生机器狗,体型小巧,但搭载了众多黑科技,能力出众,奔跑、跳跃、上下楼梯都不在话下。
机器狗正在变得越来越专业,越来越“职业”。
它们组团出动可以拉动好几吨重的卡车,也可以单独行动送快递、进行搜救等任务。就在科技公司在机器狗技能方面,不断追求更高、更快、更强的时候,大家似乎忘记了“狗”这种生物最让人着迷的特质,不是攻坚悍将、导盲能手、忠诚卫士……而是笨拙呆萌。
还记得你多少次在微信里看到那只胖的跟球一样的小阿拉斯加,站在滑板上摔倒的表情包?

还记得你多少次在网上被短腿的小柯基上台阶的蠢萌样子迷得神魂颠倒?

所以今天我们不谈那些炫酷狂拽、能力惊人的“专业”机器狗,而是为大家介绍一款可能会让你时刻感受到快乐、来自山东大学的一款四足仿生机器狗。
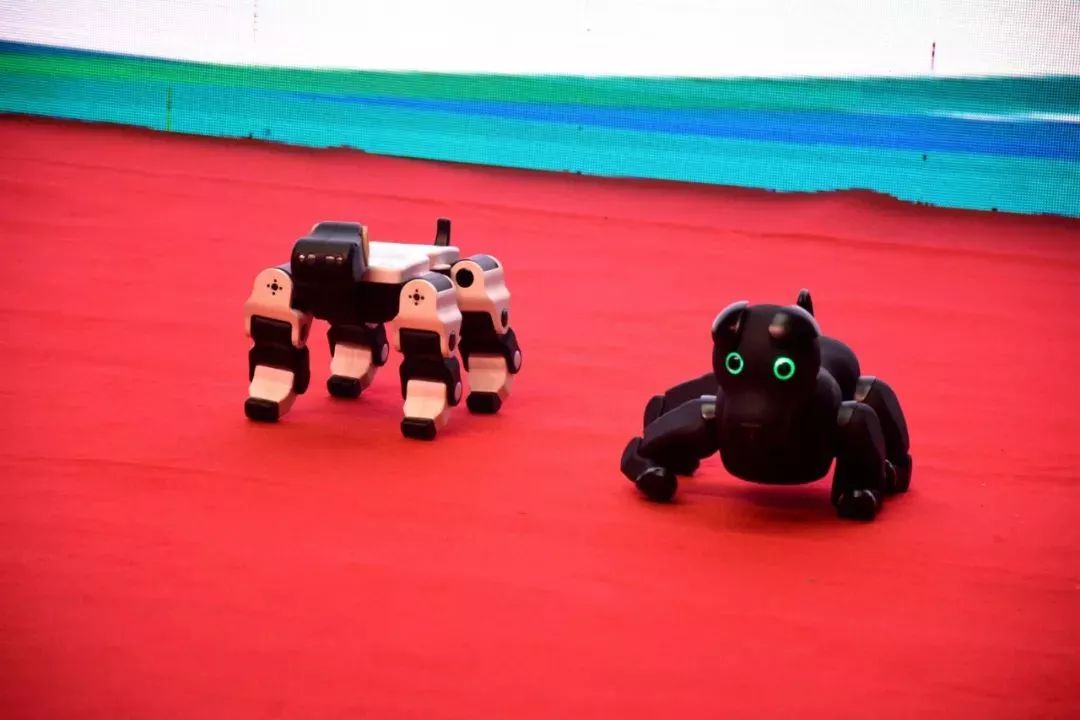
你看它上平台的动作!四只小短腿,办法总比困难多。
上台阶的时候右后腿还画了个圈,好像在试探台阶下面有没有人挖坑,是不是很像上面那只小柯基!

轻轻推是推不倒的。

有没有被视频里这只小狗的表现萌到呢?不过可别小看了它!虽然表面看起来人畜无害弱不经风的样子,其实背后曾经获得科技部四足挑战赛第一名,并两次参加“跨越险阻地面无人系统挑战赛”。
据专家介绍,该机器狗搭载有TOF激光测距传感器、单目摄像头、麦克阵列等组成的外环境感知系统和由三轴陀螺仪、三轴加速度计、磁场传感器等组成的内感知系统,对机器狗自身姿态和运动进行监测,对机器狗所处环境进行检测,并提供多重人机交互通道。
这台小机器人在9月12日的山东大学科技成果暨重大项目签约仪式上亮相。
据介绍,这是全球首款能够高速奔跑和跳跃的轻量级电驱动四足仿生机器人,“最高奔跑速度能够达到1米/秒,还具有出众的负重能力、很强的越障能力,能跨越高台,连续楼梯、障碍,具有极强的地形适应能力。”
视频来自公众号“山东高考直通车”
发布人张辰表示,四足仿生机器人适合废墟搜救、山地运输与侦察等场景,具有重要的应用价值 。而随着中国老龄化加速,养老压力的增大,宠物喂养成本高等因素,仿生机器狗也有着广阔的市场前景。

这次发布的仿生机器狗是是国内首款具备丰富感知能力,并搭载智慧AI云脑的面向家庭场景的仿生机器狗,能够不断在线学习,更适应家人的使用方式。
据介绍,山大此次发布的四足仿生机器人,在市面上已经可以购买到。“现在主要客户是大学和中学,应用于科研和教学。现在卖的挺贵,整套连着狗、带着平台、带着编程软件等,加起来一共两万多不到三万元一套。批量生产的话,价格会便宜一些。”
山东大学机器人研究中心成立于 2003 年,主要致力于机器人技术和智能装备等方向的研究工作。山东大学在电驱动四足仿生机器人方面做了不少探索:

这种小型四足仿生机器人主要模拟动物的行为,包括静步态、Tro 步态,Pace 步态,Bound 步态,可以跑得很快,也可以打滚翻起来。
不过,山东大学在机器人方面的研究最令人印象深刻的还是“大狗”——高性能液压驱动四足仿生机器人。

2006 年左右,美国波士顿动力发布四足机器人 BigDog 视频,视频中美国大兵一脚踹向机器狗,机器狗通过几个灵活的交叉步调节,很快保持住了平衡。BigDog 自诞生以来,受到不少关注。在国内,山东大学也在研发一款类似 BigDog 的四足机器人。
2007 年,山大机器人研究中心开始对伺服液压系统进行理论需求分析、设计论证等,涉足四足机器人研究领域。2010 年,团队做出第一台室内样机。近 10 年的时间,该团队持续研究四足机器人,国内已属领先水平,在国际上也有一定的知名度。
山大机器人研究中心研发制造的四足机器人,除发动机外,都属自主研发。核心技术的零部件性能,基本能实现发达国家性能的 60%-80%。
山东大学机器人研究宋锐教授曾在新智元论坛上介绍这台“中国大狗”的能力:
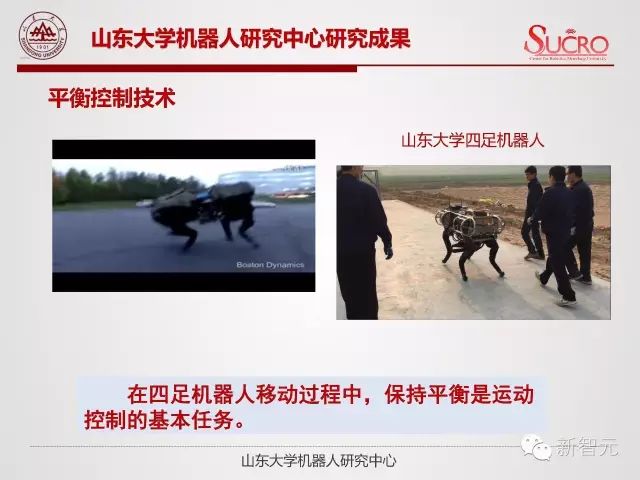
平衡控制:当受到侧向冲击,整体做一个平衡的控制。
复杂地形控制:包括雪地,大的陡坡还有滑动的情况,四足机器人都能适应。
目标识别和避障技术:能够准确识别向导和障碍,领航员在前面走,遇到障碍物可以自己躲开。
静态攀爬:爬坡接近 30 度。