
使用 OpenCV 对图像进行特征检测、描述和匹配
点击下方“AI算法与图像处理”,一起进步!
重磅干货,第一时间送达

1. 特征检测算法
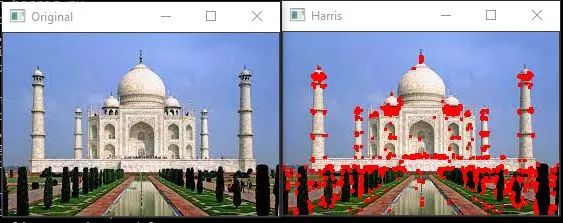
1.1 Harris角点检测
确定图像的哪个部分的强度变化很大,因为角落的强度变化很大。它通过在整个图像中移动一个滑动窗口来实现这一点。 对于识别的每个窗口,计算一个分值 R。 对分数应用阈值并标记角点。
import cv2
import numpy as np
imput_img = 'det_1.jpg'
ori = cv2.imread(imput_img)
image = cv2.imread(imput_img)
gray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv2.cornerHarris(gray,2,3,0.04)
dst = cv2.dilate(dst,None)
image[dst>0.01*dst.max()]=[0,0,255]
cv2.imshow('Original',ori)
cv2.imshow('Harris',image)
if cv2.waitKey(0) & 0xff == 27:
cv2.destroyAllWindows()
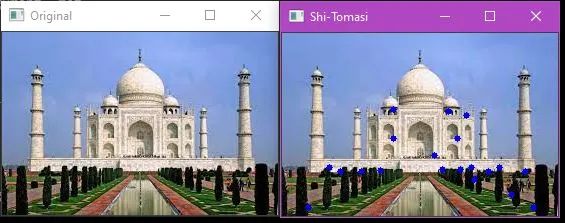
1.2 Shi-Tomasi 角点检测器
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('det_1.jpg')
ori = cv2.imread('det_1.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
corners = cv2.goodFeaturesToTrack(gray,20,0.01,10)
corners = np.int0(corners)
for i in corners:
x,y = i.ravel()
cv2.circle(img,(x,y),3,255,-1)
cv2.imshow('Original', ori)
cv2.imshow('Shi-Tomasi', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
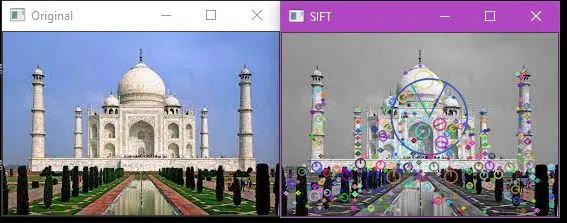
1.3 尺度不变特征变换(SIFT)

import numpy as np
import cv2 as cv
ori = cv.imread('det_1.jpg')
img = cv.imread('det_1.jpg')
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
sift = cv.SIFT_create()
kp, des = sift.detectAndCompute(gray,None)
img=cv.drawKeypoints(gray,kp,img,flags=cv.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv.imshow('Original',ori)
cv.imshow('SIFT',image)
if cv.waitKey(0) & 0xff == 27:
cv.destroyAllWindows()
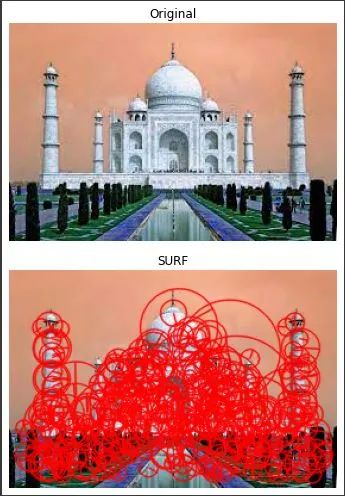
1.4 加速鲁棒特征(SURF)
import numpy as np
import cv2 as cv
ori =cv.imread('/content/det1.jpg')
img = cv.imread('/content/det1.jpg')
surf = cv.xfeatures2d.SURF_create(400)
kp, des = surf.detectAndCompute(img,None)
img2 = cv.drawKeypoints(img,kp,None,(255,0,0),4)
cv.imshow('Original', ori)
cv.imshow('SURF', img2)
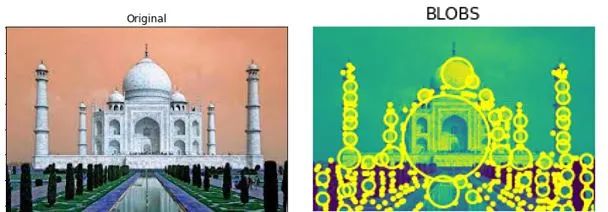
2. 斑点检测
import cv2
import numpy as np;
ori = cv2.imread('det_1.jpg')
im = cv2.imread("det_1.jpg", cv2.IMREAD_GRAYSCALE)
detector = cv2.SimpleBlobDetector_create()
keypoints = detector.detect(im)
im_with_keypoints = cv2.drawKeypoints(im, keypoints, np.array([]), (0,0,255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv2.imshow('Original',ori)
cv2.imshow('BLOB',im_with_keypoints)
if cv2.waitKey(0) & 0xff == 27:
cv2.destroyAllWindows()
3. 特征描述符算法
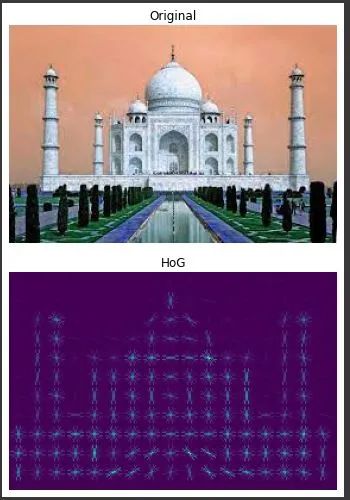
3.1 定向梯度直方图(HoG)
from skimage.feature import hog
import cv2
ori = cv2.imread('/content/det1.jpg')
img = cv2.imread("/content/det1.jpg")
_, hog_image = hog(img, orientations=8, pixels_per_cell=(16, 16),
cells_per_block=(1, 1), visualize=True, multichannel=True)
cv2.imshow('Original', ori)
cv2.imshow('HoG', hog_image)
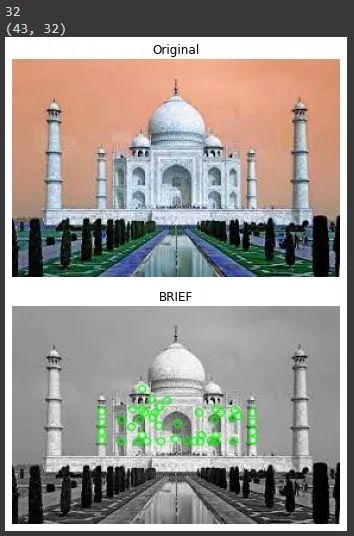
3.2 二元鲁棒独立基本特征(BRIEF)
import numpy as np
import cv2 as cv
ori = cv.imread('/content/det1.jpg')
img = cv.imread('/content/det1.jpg',0)
star = cv.xfeatures2d.StarDetector_create()
brief = cv.xfeatures2d.BriefDescriptorExtractor_create()
kp = star.detect(img,None)
kp, des = brief.compute(img, kp)
print( brief.descriptorSize() )
print( des.shape )
img2 = cv.drawKeypoints(img, kp, None, color=(0, 255, 0), flags=0)
cv.imshow('Original', ori)
cv.imshow('BRIEF', img2)
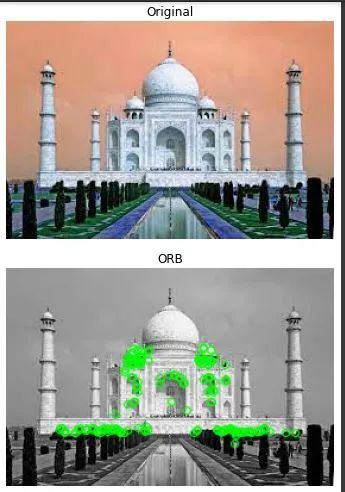
3.3 定向快速旋转简报 (ORB)
import numpy as np
import cv2
ori = cv2.imread('/content/det1.jpg')
img = cv2.imread('/content/det1.jpg', 0)
orb = cv2.ORB_create(nfeatures=200)
kp = orb.detect(img, None)
kp, des = orb.compute(img, kp)
img2 = cv2.drawKeypoints(img, kp, None, color=(0, 255, 0), flags=0)
cv2.imshow('Original', ori)
cv2.imshow('ORB', img2)
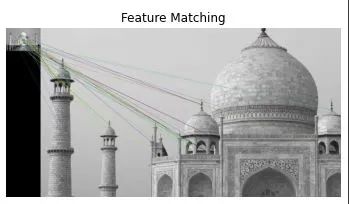
4. 特征匹配
import cv2
img1 = cv2.imread('/content/det1.jpg', 0)
img2 = cv2.imread('/content/88.jpg', 0)
orb = cv2.ORB_create(nfeatures=500)
kp1, des1 = orb.detectAndCompute(img1, None)
kp2, des2 = orb.detectAndCompute(img2, None)
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
matches = bf.match(des1, des2)
matches = sorted(matches, key=lambda x: x.distance)
match_img = cv2.drawMatches(img1, kp1, img2, kp2, matches[:50], None)
cv2.imshow('original image', img1)
cv2.imshow('test image', img2)
cv2.imshow('Matches', match_img)
cv2.waitKey()

尾注
个人微信(如果没有备注不拉群!) 请注明:地区+学校/企业+研究方向+昵称
下载1:何恺明顶会分享
在「AI算法与图像处理」公众号后台回复:何恺明,即可下载。总共有6份PDF,涉及 ResNet、Mask RCNN等经典工作的总结分析
下载2:终身受益的编程指南:Google编程风格指南
在「AI算法与图像处理」公众号后台回复:c++,即可下载。历经十年考验,最权威的编程规范!
下载3 CVPR2021 在「AI算法与图像处理」公众号后台回复:CVPR,即可下载1467篇CVPR 2020论文 和 CVPR 2021 最新论文

评论