点击上方“AI算法与图像处理”,选择加"星标"或“置顶”
重磅干货,第一时间送达
昨日,ECCV 2020五项大奖出炉,分别是最佳论文奖、最佳论文提名奖、Koenderink奖、Mark Everingham奖、Demo奖,ImageNet 论文一作邓嘉获最佳论文奖。另外,ECCV2020全部论文已开放下载。ECCV2020论文合集下载
http://www.ecva.net/papers.php为了方便大家学习,极市已经将全部论文(共1357篇)下载并打包,在 AI算法与图像处理 后台回复 ECCV2020 即可获取论文打包下载链接。下面将介绍本次ECCV2020的五项大奖。(内容来源:机器之心)
最佳论文奖
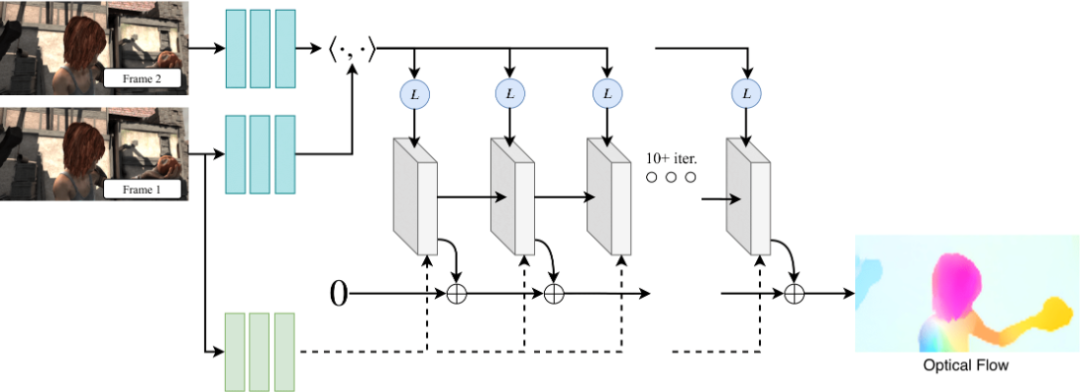
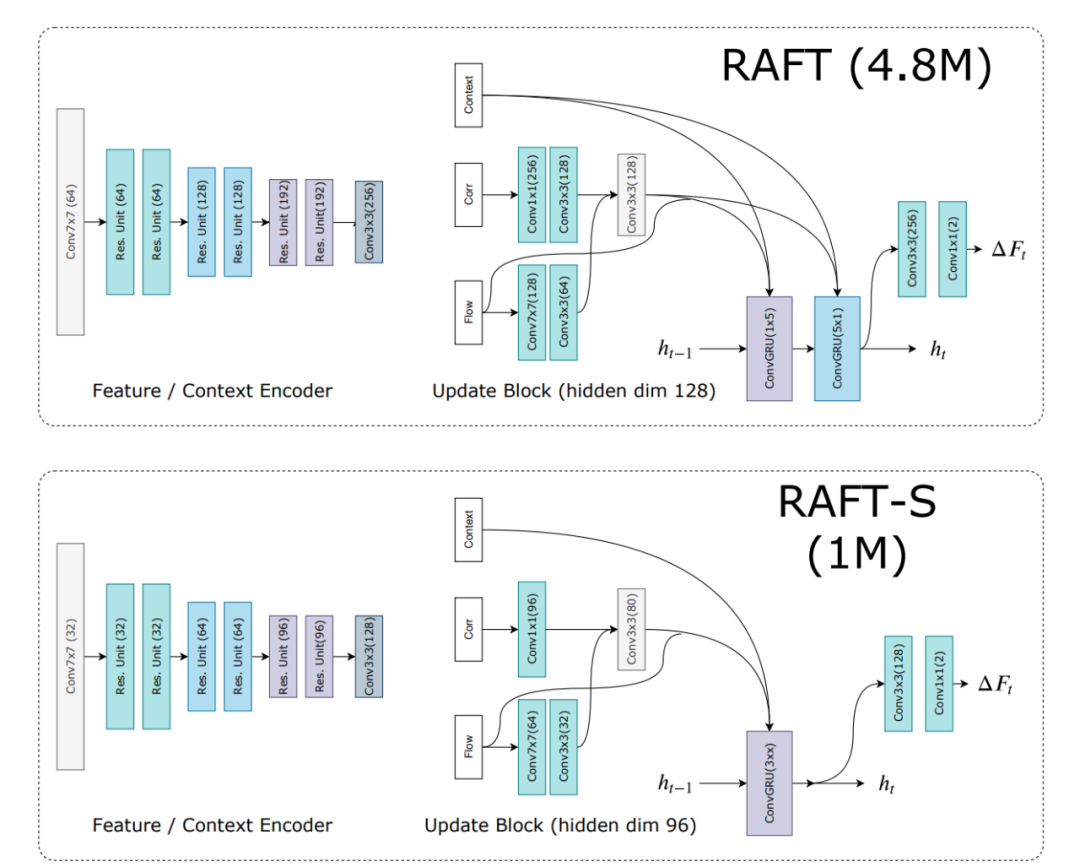
这项研究提出了一种用于光流的新型深度网络架构——循环全对场变换(Recurrent All-Pairs Field Transforms,RAFT)。RAFT 提取每个像素(per-pixel)的特征,为所有像素对构建多尺度 4D 相关体(correlation volume),并通过循环单元迭代地更新流场,循环单元基于相关体执行查找。RAFT 在多个数据集上实现了 SOTA 性能:在 KITTI 数据集上,RAFT 的 F1-all 误差是 5.10%,相比先前的最佳结果(6.10%)减少了 16%;在 Sintel 数据集(final pass)上,RAFT 只有 2.855 像素的端点误差(end-point-error),相比先前的最佳结果(4.098 像素)减少了 30%。另外,RAFT 具有强大的跨数据集泛化能力,并且在推理时间、训练速度和参数计数方面具有很高的效率。4.8M 参数完整版模型和 1.0M 参数小模型的网络架构细节。最佳论文的第一作者 Zachary Teed 现在普林斯顿读博,导师为邓嘉。他的研究兴趣是:3D 视频重建,包括运动恢复结构(Structure from Motion,SfM)、场景流(Scene Flow)和 SLAM。论文二作是普林斯顿大学计算机科学系助理教授邓嘉,主要研究方向是计算机视觉和机器学习,目前的研究兴趣是:3D 视觉、目标识别、动作识别和自动定理证明。曾获得 Sloan Research Fellowship、PAMI Mark Everingham Prize、 Yahoo ACE Award、Google Faculty Research Award、ICCV Marr Prize 等奖项。值得一提的是,这并不是邓嘉第一次获得 ECCV 的最佳论文奖,2014 年他凭借论文《Large-Scale Object Classification Using Label Relation Graphs》获得当年的 ECCV 最佳论文奖,并且是该研究的第一作者。除此之外,他还是 ImageNet 论文的第一作者。ImageNet 数据集是目前机器学习领域最常用的数据集之一,它催生出了极大促进人工智能发展的 ImageNet 比赛。作为 ImageNet 的一作,邓嘉为其倾注了许多心血。2019 年,这篇论文获得了 CVPR PAMI Longuet-Higgins(经典论文)奖。邓嘉在接受机器之心采访时表示:「这个项目很说明一件事情,当时做 ImageNet 不是最主流的工作,但是我们所有做此项目的人都相信它会有很大的影响,所以我们就花了很大力气做这个事情。确实,它给我自己的一个启示是,你不一定要做最流行的事情,但要做自己相信会有影响的事情。」目前,这篇发表于 2009 年的论文被引用量已超过两万。最佳论文荣誉提名奖
大会还公布了最佳论文荣誉提名奖,共有两篇论文获得此奖项。论文 1:Towards Streaming Image Understanding具身感知(embodied perception)指自动智能体感知环境以便做出反应的能力。智能体的响应度很大程度上取决于处理流程的延迟。之前的工作主要涉及延迟和准确率之间的算法权衡,但缺少一种明确的指标来对比不同方法的帕累托最优延迟 - 准确率曲线。这篇论文指出标准离线评估和实时应用之间的差异:算法处理完特定图像帧时,周围环境已经发生改变。该研究提出将延迟和准确率协调地集成到一个度量指标中,用于实时在线感知,这就是「流准确率」(streaming accuracy)。此外,该研究基于此度量指标提出了一个元基准,它可以系统性地将任意图像理解任务转换成流图像理解任务。研究人员主要关注城市视频流中的目标检测和实例分割任务,并创建了具备高质量、时序稠密标注的新数据集。在帕累托最优延迟 - 准确率曲线上,存在能够最大化流准确率的最优点;
异步跟踪和未来预测很自然地成为流图像理解的内部表征;
动态调度可用于克服时间混叠(temporal aliasing),得到一个吊诡的结果:什么都不做可能使延迟最小化。
论文 2:NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis该研究提出了一种在合成复杂场景新视图任务中实现 SOTA 结果的新方法,该方法通过使用稀疏的输入视图集来优化基础的连续体场景函数。该算法使用全连接深度网络表示场景,其输入为单个连续 5D 坐标(空间位置 (x, y, z) 和视角方向 (θ, φ)),输出为体积密度和在此空间位置上的视图相关 emitted radiance。该研究通过查询沿着摄像头光线的 5D 坐标来合成视图,并使用经典的体渲染技术将输出颜色和密度投影到图像中。由于体渲染本身是可微的,因此优化表征所需的唯一输入是一组具备已知摄像机位姿的图像。研究者介绍了如何高效优化神经辐射场(neural radiance field),渲染出逼真的具备复杂几何形状和外观的场景新视图,而且其在神经渲染和视图合成方面的效果优于之前的工作。经典论文:Koenderink 奖
Koenderink 奖旨在表彰计算机视觉领域的基础性贡献研究,获奖论文均为发表时间超过十年并经受住时间检验的研究。本届 ECCV 会议 Koenderink 奖颁发给了以下两篇论文:论文 1:Improving the Fisher Kernel for Large-Scale Image ClassificationFisher Kernel(FK)是一个结合了生成和判别方法优点的通用框架。在图像分类领域,FK 扩展了流行的视觉词袋(BOV)模型。然而,在实践中,这种丰富的表征尚未显现出相对 BOV 的优越性。在论文的第一部分,研究者对原始框架进行了多项修改,使得 FK 准确率得到提升。在 PASCAL VOC 2007 数据集上的平均精度(AP)从 47.9% 提升到了 58.3%。改进后的框架在 CalTech 256 数据集上也展现出了 SOTA 准确率。其主要优势在于这些结果仅使用 SIFT 描述子和线性分类器获得。使用该表征后,FK 框架可用于探索更大规模的图像分类任务。在论文的第二部分应用部分,研究者对比了在两个大规模标注图像数据集上的分类器训练情况:ImageNet 和 Flickr groups 数据集。在涉及数十万训练图像的评估中,研究者发现基于 Flickr groups 学得的分类器性能非常好,而且它们可以对在更精细标注数据集上学得的分类器进行补充。论文 2:BRIEF: Binary Robust Independent Elementary Features这项研究提出将二进制字符串用作高效的特征点描述符,即 BRIEF。研究证明,即使在 bits 相对较少的情况下,BRIEF 依然呈现出高判别性,并且可以通过简单的强度差测试来计算。此外,对描述符相似度的评估没有采用常见的 L_2 范数,而是使用了汉明距离(Hamming distance),后者计算起来非常高效。因此,BRIEF 的构建和匹配速度非常快。该研究在标准基准上将 BRIEF 与 SURF 和 U-SURF 进行比较,结果表明 BRIEF 能够实现相当或更优的识别性能,同时运行时间只需其他二者的一部分。PAMI Everingham 奖
该奖项旨在纪念 Mark Everingham,并鼓励其他人向他学习,推进整个计算机视觉社区进一步发展。PAMI Everingham 奖授予对计算机视觉社区做出无私贡献的研究者或研究团队,由 IEEE 计算机协会模式分析与机器智能(PAMI)技术委员会颁发。今年的 PAMI Everingham 奖颁给了微软高级科学家 Johannes Schönberger,以及 MIT 教授 Antonio Torralba 及创建多个数据集的合作者。Johannes Schönberger 现为微软混合现实与人工智能苏黎世实验室高级科学家,开发了 COLMAP SFM 和 MVS 软件库。Johannes Schönberger 的获奖理由是:他的工作为 3D 图像重建提供了一个开源的端到端 pipeline 以及相关支持、开发和文档。目前这已成为运动恢复结构(SFM)和多视角立体视觉(Multi-view Stereo,MVS)的参考软件。Antonio Torralba 现为 MIT 电气工程与计算机科学教授。在十多年的时间里,Antonio Torralba 与其他合作者定期发布新数据集以及创建这些数据集的方法。他们创建的 LabelMe、Tiny images、SUN/SUN-3D 和 MIT-Places 等数据集在计算机视觉领域有着极大的影响力。Demo 奖
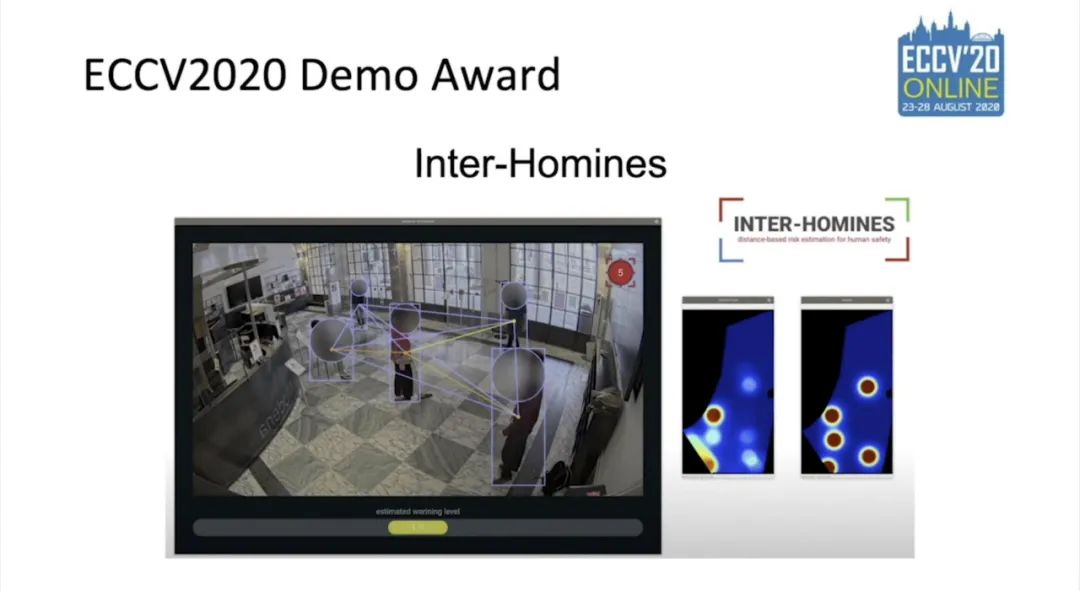
此外,大会公布了 Demo 奖。获奖论文是《Inter-Homines: Distance-Based Risk Estimation for Human Safety》。另有两篇研究获得了 ECCV 2020 Demo 奖提名:
下载1:动手学深度学习
在「AI算法与图像处理」公众号后台回复:动手学深度学习,即可下载547页《动手学深度学习》电子书和源码。该书是面向中文读者的能运行、可讨论的深度学习教科书,它将文字、公式、图像、代码和运行结果结合在一起。本书将全面介绍深度学习从模型构造到模型训练,以及它们在计算机视觉和自然语言处理中的应用。
在「AI算法与图像处理」公众号后台回复:OpenCV实战项目20讲,即可下载20个有趣的OpenCV实战项目