ECCV 2020 谷歌论文盘点—Poster 篇
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
今天盘点Poster中的谷歌论文,总计27篇,从这些论文中可看出,谷歌很重视自动驾驶,多篇论文为自动驾驶领域,目标检测、NAS、数据增广方法等也是研究的重点。
下载所有ECCV 2020 请点这里:
论文相关代码已列出,欢迎感兴趣的朋友参考。
弱监督、视频理解
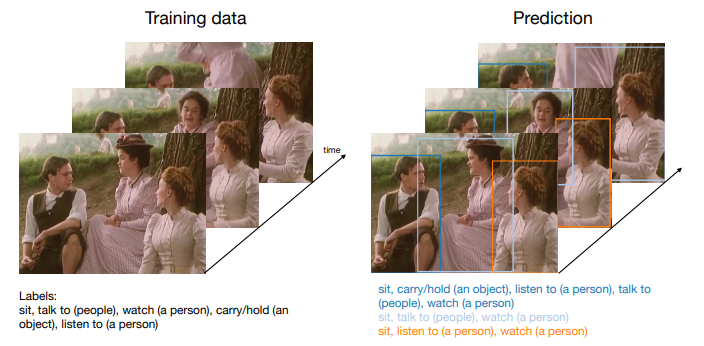
[2].Uncertainty-Aware Weakly Supervised Action Detection from Untrimmed Videos
作者 | Anurag Arnab, Chen Sun, Arsha Nagrani, Cordelia Schmid
单位 | 谷歌
论文 | https://arxiv.org/abs/2007.10703
备注 | ECCV 2020
针对未裁剪的视频提出一种不确定性感知的弱监督动作检测算法。
[3].Beyond Controlled Environments: 3D Camera Re-Localization in Changing Indoor Scenes
作者 | Johanna Wald, Torsten Sattler, Stuart Golodetz, Tommaso Cavallari, Federico Tombari
单位 | 慕尼黑工业大学;查尔姆斯理工大学;捷克理工大学;Five AI Ltd;谷歌
论文 | https://arxiv.org/abs/2008.02004
主页 | https://waldjohannau.github.io/RIO10/
备注 | ECCV 2020
该文提出一种超越受控环境的室内场景变化中的3D摄像机重定位方法。
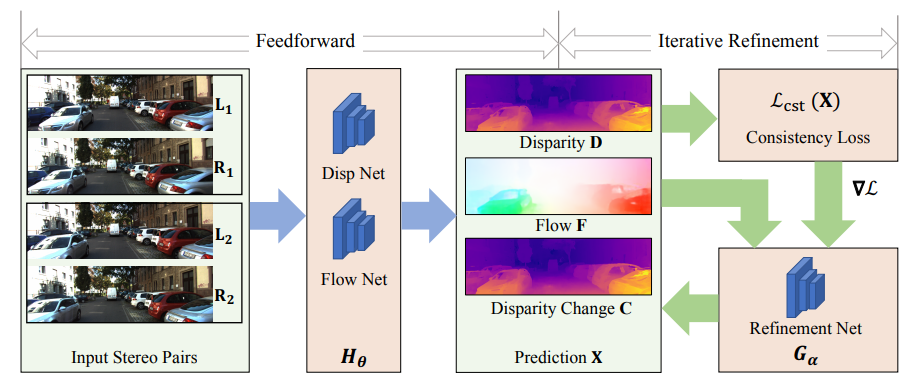
[4].Consistency Guided Scene Flow Estimation
作者 | Yuhua Chen, Luc Van Gool, Cordelia Schmid, Cristian Sminchisescu
单位 | 谷歌,ETH Zurich
论文 | https://arxiv.org/abs/2006.11242
备注 | ECCV 2020
该文提出一种自监督学习框架,从立体视频中重建三维场景结构和运动。
[5].Continuous Adaptation for Interactive Object Segmentation by Learning from Corrections
作者 | Theodora Kontogianni, Michael Gygli, Jasper Uijlings, Vittorio Ferrari
单位 | 谷歌,亚琛工业大学
论文 | https://arxiv.org/abs/1911.12709
备注 | ECCV 2020
一种从用户校正操作中学习得到的交互式土体分割方法。
人体姿态估计
[6].SimPose: Effectively Learning DensePose and Surface Normals of People from Simulated Data
作者 | Tyler Zhu, Per Karlsson, Christoph Bregler
单位 | 谷歌
论文 | https://arxiv.org/abs/2007.15506
备注 | ECCV 2020
对人体进行密集2.5D DensePose 和3D表面法向标注是非常昂贵的,该文提出一种从模拟数据经域适应技术进行真人密集姿态估计和表面法向量计算的方法,大幅降低了成本取得了不错的效果。
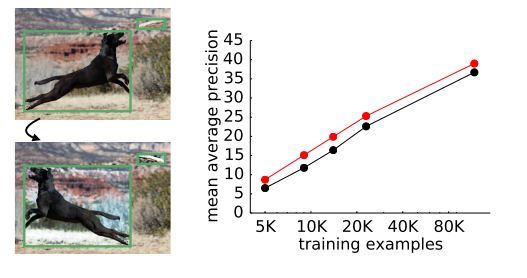
[7].Learning Data Augmentation Strategies for Object Detection
作者 | Barret Zoph, Ekin D. Cubuk, Golnaz Ghiasi, Tsung-Yi Lin, Jonathon Shlens, Quoc V. Le
单位 | 谷歌
论文 | https://arxiv.org/abs/1906.11172
代码 | https://github.com/tensorflow/tpu/tree/master/
models/official/detection
备注 | ECCV 2020
数据增广是如此重要,已经获得大量研究者的关注,但作者发现对于图像分类有效的增广策略对目标检测的提升是有限的,于是作者提出一重可学习的用于目标检测特定任务的增广方法,实验中取得了2.3mAP的提升,而且将这种策略直接用于其他数据集,同样获得了2.7mAP的提升,证明这种方法推广性很好。
[8].Streaming Object Detection for 3-D Point Clouds
作者 | Wei Han, Zhengdong Zhang, Benjamin Caine, Brandon Yang, Christoph Sprunk, Ouais Alsharif, Jiquan Ngiam, Vijay Vasudevan, Jonathon Shlens, Zhifeng Chen
单位 | 谷歌,Waymo
论文 | https://arxiv.org/abs/2005.01864
备注 | ECCV 2020
不同于RGB成像的相机,需要获得全部数据再进行后一步处理,这在自动驾驶汽车中会造成一定的延迟,该文针对激光雷达信号采集的流式的特点,设计一种流式目标检测的算法,降低了系统延迟。
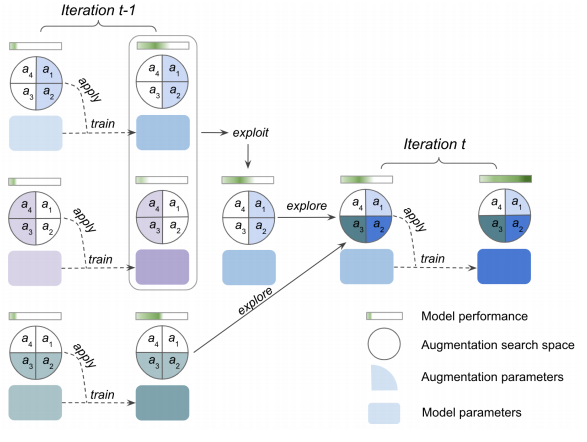
[9].Improving 3D Object Detection through Progressive Population Based Augmentation
作者 | Shuyang Cheng, Zhaoqi Leng, Ekin Dogus Cubuk, Barret Zoph, Chunyan Bai, Jiquan Ngiam, Yang Song, Benjamin Caine, Vijay Vasudevan, Congcong Li, Quoc V. Le, Jonathon Shlens, Dragomir Anguelov
单位 | Waymo LLC;谷歌
论文 | https://arxiv.org/abs/2004.00831
备注 | ECCV 2020
针对点云数据的目标检测的数据增广方法。
3D目标检测,LSTM,点云
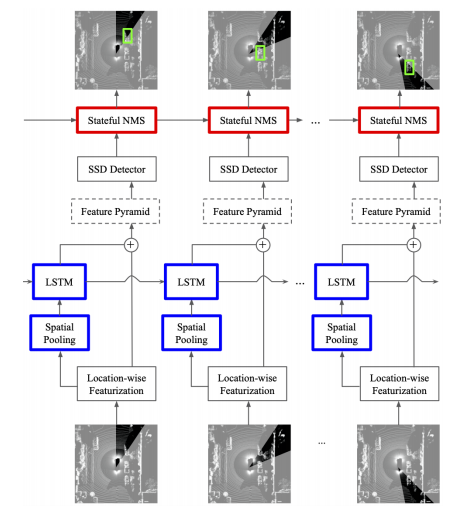
[10].An LSTM Approach to Temporal 3D Object Detection in LiDAR Point Clouds
作者 | Rui Huang, Wanyue Zhang, Abhijit Kundu, Caroline Pantofaru, David A Ross, Thomas Funkhouser, Alireza Fathi
单位 | 谷歌
论文 | https://arxiv.org/abs/2007.12392
主页 | https://sites.google.com/view/lstm-3d-detection/home
备注 | ECCV 2020
再点云数据中,基于LSTM的时序3D目标检测方法。
AutoML,NAS
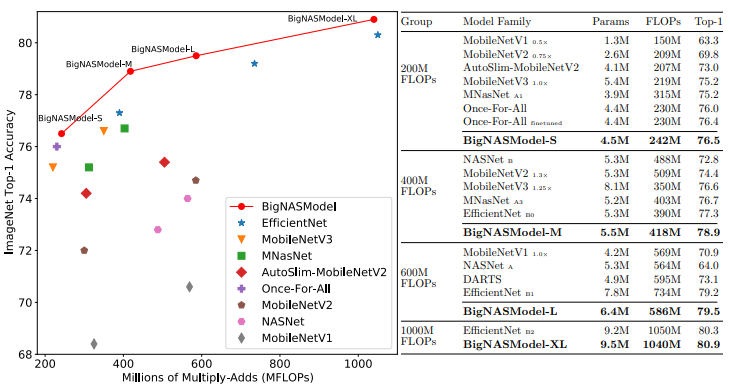
[11].BigNAS: Scaling Up Neural Architecture Search with Big Single-Stage Models
作者 | Jiahui Yu, Pengchong Jin, Hanxiao Liu, Gabriel Bender, Pieter-Jan Kindermans, Mingxing Tan, Thomas Huang, Xiaodan Song, Ruoming Pang, Quoc Le
单位 | 谷歌,University of Illinois at Urbana-Champaign
论文 | https://arxiv.org/abs/2003.11142
备注 | ECCV 2020
在NAS中一次搜索训练,得到多个不需要重训练或后处理的子模型,并且这些子模型精度超越了EfficientNets 和 Once-for-All 网络等工作。
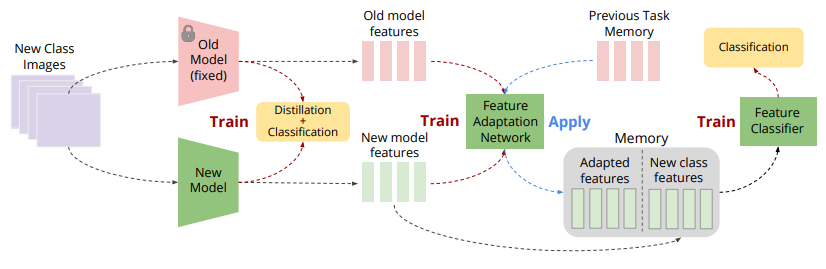
[12].Memory-Efficient Incremental Learning Through Feature Adaptation
作者 | Ahmet Iscen, Jeffrey Zhang, Svetlana Lazebnik, Cordelia Schmid
单位 | 谷歌
论文 | https://arxiv.org/abs/2004.00713
备注 | ECCV 2020
基于特征适应的内存高效的增量学习法方法。
[13].Virtual Multi-view Fusion for 3D Semantic Segmentation
作者 | Abhijit Kundu, Xiaoqi Yin, Alireza Fathi, David Ross, Brian Brewington, Thomas Funkhouser, Caroline Pantofaru
单位 | 谷歌
论文 | https://arxiv.org/abs/2007.13138
主页 | https://abhijitkundu.info/projects/multiview_segmentation/
备注 | ECCV 2020
虚拟多视图融合用于3D语义分割。
目标检测
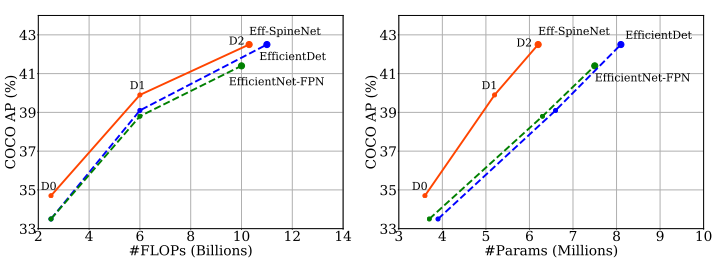
[14].Efficient Scale-Permuted Backbone with Learned Resource Distribution
作者 | Xianzhi Du, Tsung-Yi Lin, Pengchong Jin, Yin Cui Mingxing Tan, Quoc Le, and Xiaodan Song
单位 | 谷歌
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123680562.pdf
备注 | ECCV 2020
使用NAS搜索得到目标检测的骨干网络,在检测任务中超越EfficientDet,在分类、语义分割中也取得了不错效果。
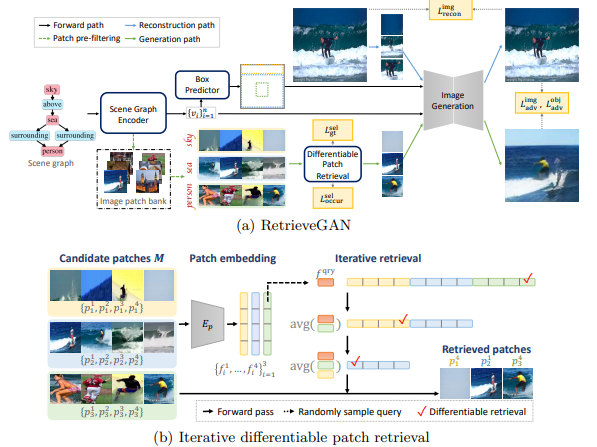
[15].RetrieveGAN: Image Synthesis via Differentiable Patch Retrieval
作者 | Hung-Yu Tseng, Hsin-Ying Lee, Lu Jiang, Ming-Hsuan Yang, Weilong Yang
单位 | 谷歌,University of California, Merced,Yonsei University
论文 | https://arxiv.org/abs/2007.08513
备注 | ECCV 2020
通过可微分的Patch检索进行图像合成。
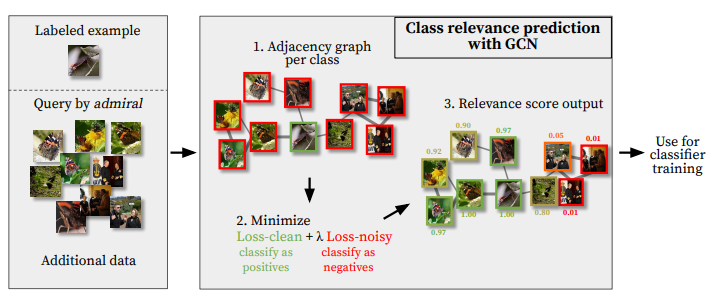
[16].Graph convolutional networks for learning with few clean and many noisy labels
作者 | Ahmet Iscen, Giorgos Tolias, Yannis Avrithis, Ondrej Chum, Cordelia Schmid
单位 | 谷歌,Czech Technical University in Prague,Univ Rennes
论文 | https://arxiv.org/abs/1910.00324
备注 | ECCV 2020
通过图卷积网络在少量干净和大量含噪声样本中进行学习。
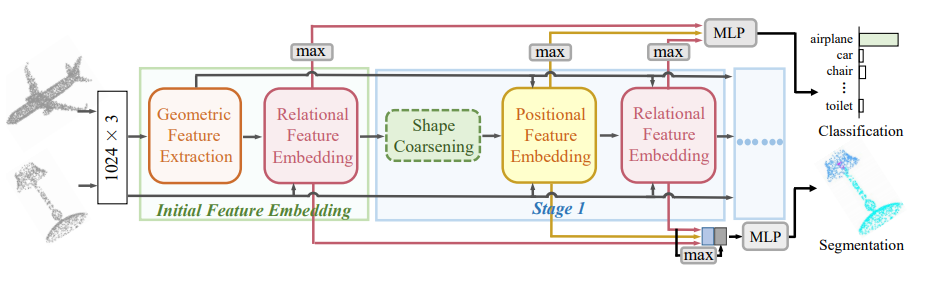
[17].Deep Positional and Relational Feature Learning for Rotation-Invariant Point Cloud Analysis
作者 | Ruixuan Yu , Xin Wei, Federico Tombari , and Jian Sun
单位 | 西安交通大学;慕尼黑工业大学;谷歌
论文 | http://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123550222.pdf
备注 | ECCV 2020
旋转不变的点云分析。
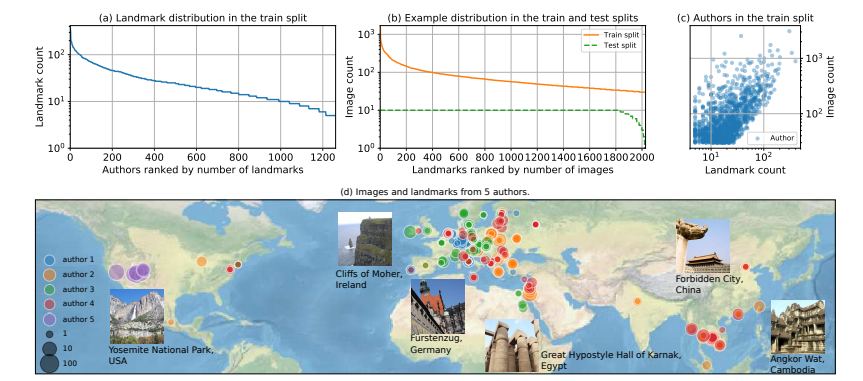
[18].Federated Visual Classification with Real-World Data Distribution
作者 | Tzu-Ming Harry Hsu, Hang Qi, Matthew Brown
单位 | 麻省理工学院;谷歌
论文 | https://arxiv.org/abs/2003.08082
数据集 | https://github.com/google-research/google-research/tree/master/federated_vision_datasets
备注 | ECCV 2020
保护数据隐私的联邦学习。
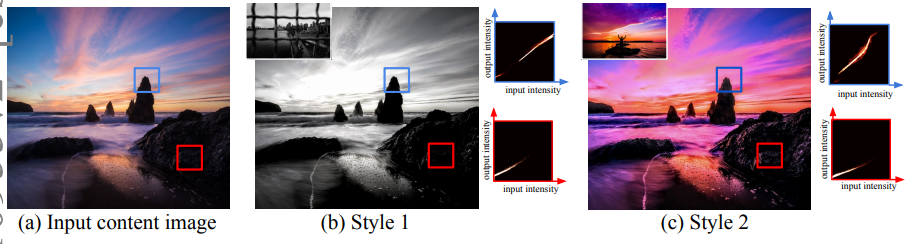
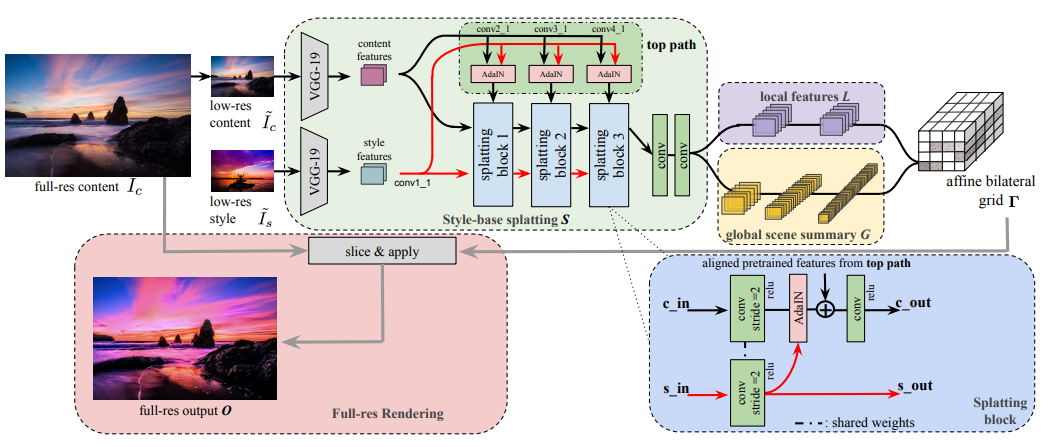
[19].Joint Bilateral Learning for Real-time Universal Photorealistic Style Transfer
作者 | Xide Xia, Meng Zhang, Tianfan Xue, Zheng Sun, Hui Fang, Brian Kulis, Jiawen Chen
单位 | 波士顿大学;PixelShift.AI;谷歌
论文 | https://arxiv.org/abs/2004.10955
备注 | ECCV 2020
联合双边学习,用于实时通用逼真的风格迁移。
注意力机制,视频理解,活动识别
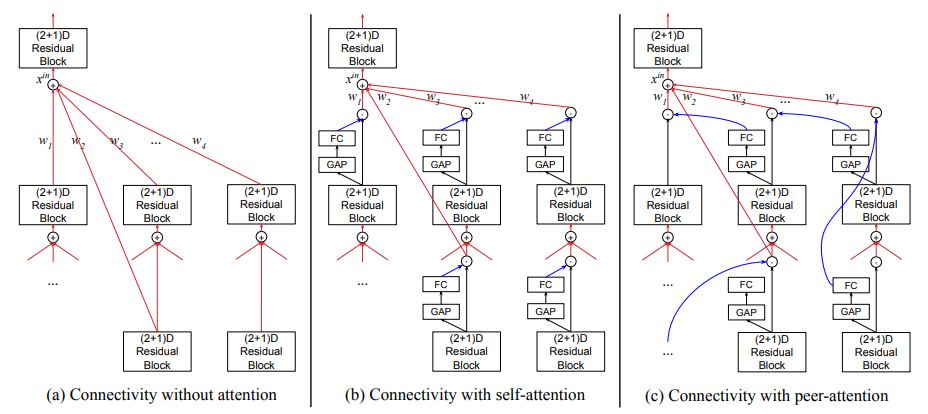
[20].AssembleNet++: Assembling Modality Representations via Attention Connections
作者 | Michael S. Ryoo, AJ Piergiovanni, Juhana Kangaspunta, Anelia Angelova
单位 | 谷歌,Stony Brook University
论文 | https://arxiv.org/abs/2008.08072
代码 | https://github.com/google-research/google-research/tree/master/assemblenet
主页 | https://sites.google.com/view/assemblenet/
备注 | ECCV 2020
半监督学习+图像分割
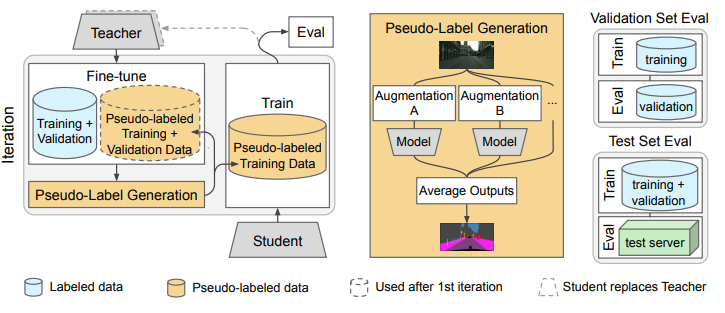
[21].Naive-Student: Leveraging Semi-Supervised Learning in Video Sequences for Urban Scene Segmentation
作者 | Liang-Chieh Chen, Raphael Gontijo Lopes, Bowen Cheng, Maxwell D. Collins, Ekin D. Cubuk, Barret Zoph, Hartwig Adam, Jonathon Shlens
单位 | 谷歌,UIUC
论文 | https://arxiv.org/abs/2005.10266
备注 | ECCV 2020
视频序列的半监督学习用于城市场景分割。
视频分类
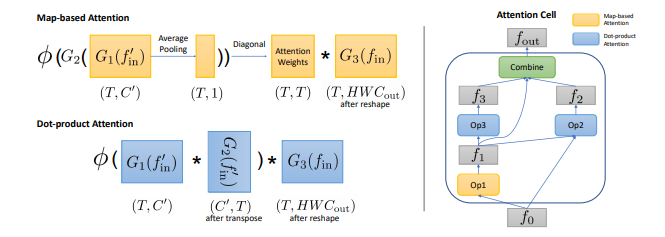
[22].AttentionNAS: Spatiotemporal Attention Cell Search for Video Classification
作者 | Xiaofang Wang, Xuehan Xiong, Maxim Neumann, AJ Piergiovanni, Michael S. Ryoo, Anelia Angelova, Kris M. Kitani, Wei Hua
单位 | 谷歌;卡内基梅隆大学
论文 | https://arxiv.org/abs/2007.12034
备注 | ECCV 2020
将时空注意力与NAS结合的视频分类模型。
图像检索
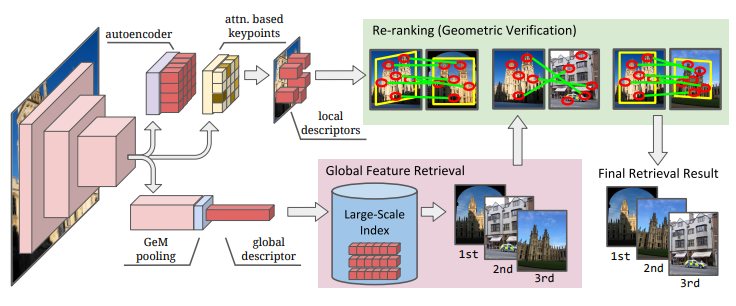
[23].Unifying Deep Local and Global Features for Image Search
作者 | Bingyi Cao, Andre Araujo, Jack Sim
单位 | 谷歌
论文 | https://arxiv.org/abs/2001.05027
代码 | https://github.com/tensorflow/models/
tree/master/research/delf
备注 | ECCV 2020
统一深度局部和全局特征的图像搜索。
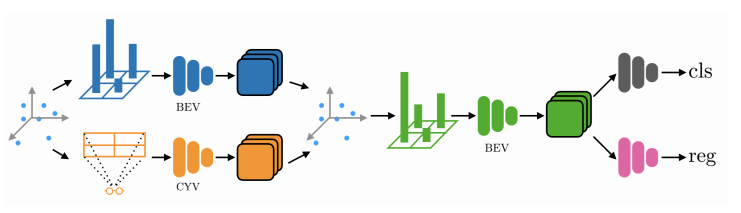
[24].Pillar-based Object Detection for Autonomous Driving
作者 | Yue Wang, Alireza Fathi, Abhijit Kundu, David Ross, Caroline Pantofaru, Thomas Funkhouser, Justin Solomon
单位 | 麻省理工学院;谷歌
论文 | https://arxiv.org/abs/2007.10323
代码 | https://github.com/WangYueFt/pillar-od
备注 | ECCV 2020
自动驾驶目标检测。
[25].Improving Object Detection with Selective Self-supervised Self-training
作者 | Yandong Li, Di Huang, Danfeng Qin, Liqiang Wang, Boqing Gong
单位 | 中佛罗里达大学;谷歌
论文 | https://arxiv.org/abs/2007.09162
备注 | ECCV 2020
通过可选择的自监督自训练方法改进目标检测。

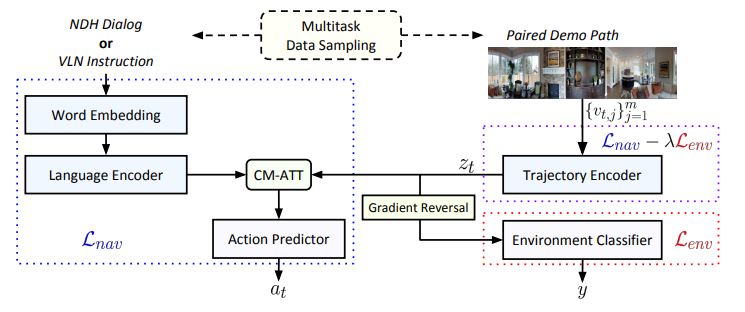
[26].Environment-agnostic Multitask Learning for Natural Language Grounded Navigation
作者 | Xin Eric Wang, Vihan Jain, Eugene Ie, William Yang Wang, Zornitsa Kozareva, Sujith Ravi
单位 | 加利福尼亚大学圣克鲁兹分校;加州大学圣巴巴拉分校;谷歌;亚马逊
论文 | https://arxiv.org/abs/2003.00443
代码 | https://github.com/google-research/valan
备注 | ECCV 2020
面向自然语言的导航的环境不可知多任务学习。
[27].SimAug: Learning Robust Representations from Simulation for Trajectory Prediction
作者 | Junwei Liang, Lu Jiang, Alexander Hauptmann
单位 | 卡内基梅隆大学;谷歌
论文 | https://arxiv.org/abs/2004.02022
代码 | https://github.com/JunweiLiang/Multiverse/tree/master/SimAug
主页 | https://next.cs.cmu.edu/simaug/
备注 | ECCV 2020
从仿真数据中学习用于轨迹预测的鲁棒表示。