
RoboGen 开启机器人大规模学习通用场景任务的新纪元
CMU、MIT、清华联合发布了全球首个生成式机器人智能体RoboGen,可以无限生成数据,让机器人7*24小时永不停歇地训练。为机器人进入通用场景迈出坚实一步。
项目地址:https://robogen-ai.github.io/
论文地址:https://arxiv.org/abs/2311.01455
Github地址:https://github.com/Genesis-Embodied-AI
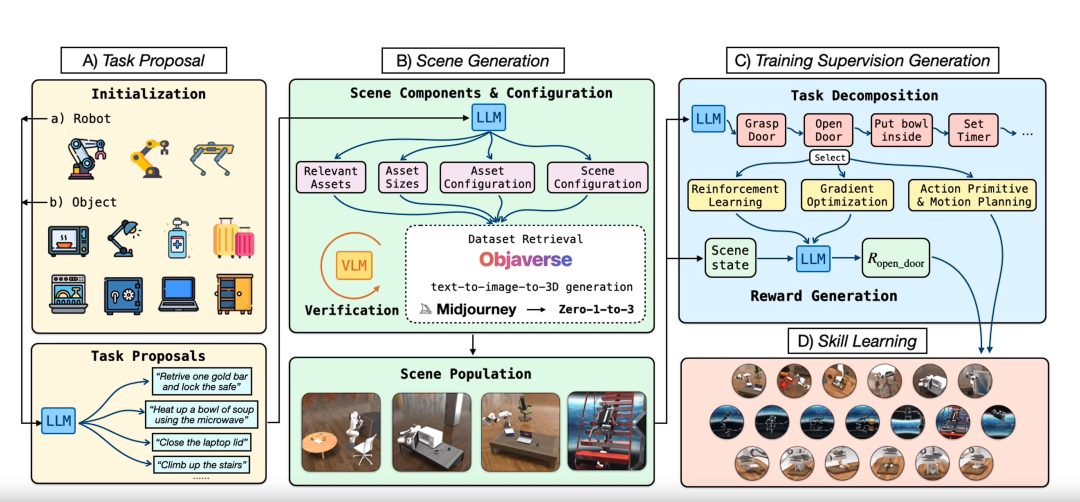
RoboGen,一种自动学习多样化的生成式机器人仿真,通过生成模拟大规模提高机器人技能。RoboGen 利用最新的基础模型和生成模型的进步,而不是直接使用或 调整这些模型以制定策略或低级行动一种生成方案,使用这些模型自动生成多样化的任务、场景和训练监督,从而在最少的人工监督下扩展机器人技能学习。
该方法设置了机器人代理,通过自我引导的提议-生成-学习循环:智能体首先提出有趣的任务和技能来开发,然后生成相应的模拟,通过使用适当的空间配置填充相关对象和资产来设置环境。之后,代理将建议的高级任务分解为子任务,选择最优学习方法(强化学习、运动 计划或轨迹优化),生成所需的训练监督,然后学习策略以获得建议的技能。该工作试图提取嵌入在大型模型中的广泛而多才多艺的知识,进入了机器人领域。完全生成式路径可以反复查询,从而产生源源不断的技能演示与不同的任务和环境。
RoboGen 使用 Genesis 进行仿真和渲染,Genesis 是一种用于通用机器人学习的多材料多求解器生成式仿真引擎。
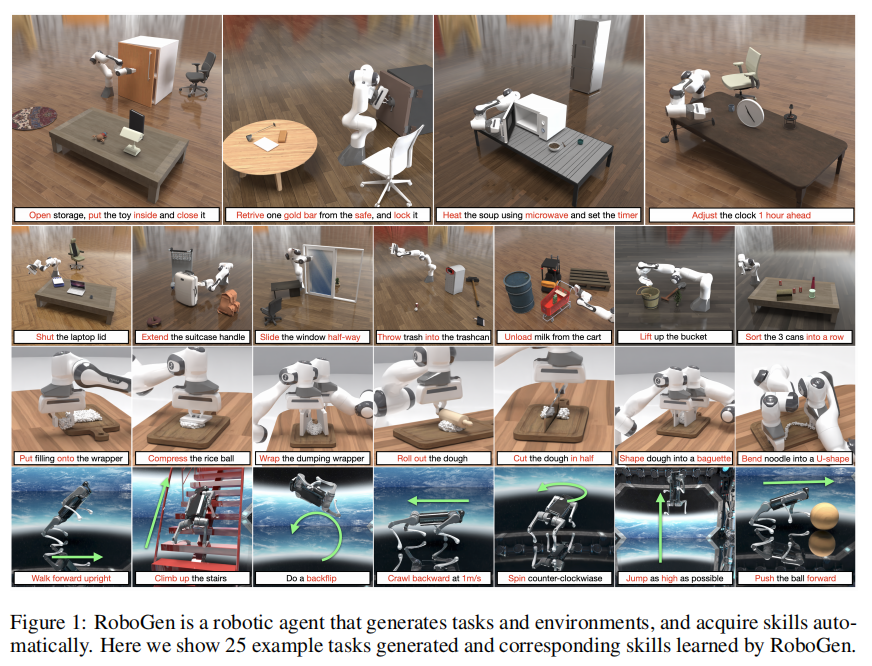
实验证明,RoboGen能够生成多样化的技能演示,包括刚性和关节物体操作、可变形物体操作以及四足行走技能。与以往的人工创建的机器人技能学习数据集相比,RoboGen生成的任务和技能更加多样化,几乎不需要人类参与。该研究试图将大模型中的广泛知识转移到机器人领域,为通用机器人系统的大规模自动化技能训练迈出了一步。
来源:CAAI认知系统与信息处理专委会
本文仅做学术分享,如有侵权,请联系删文。
—THE END—
评论