
鸟群的启发--粒子群算法

看文章之前先看一个相关小视频(55s, 2.86M):
1. PSO的基本思想:
“自然界的蚁群、鸟群、鱼群、羊群、牛群、蜂群等,其实时时刻刻都在给予我们以某种启示,只不过我们常常忽略了大自然对我们的最大恩赐!”——马良教授
粒子群算法的思想源于对鸟群捕食行为的研究.模拟鸟集群飞行觅食的行为,鸟之间通过集体的协作使群体达到最优目的。
设想这样一个场景:一群鸟在随机搜索食物
已知:
(1). 在这块区域里只有一块食物;
(2). 所有的鸟都不知道食物在哪里;
(3). 但它们能感受到当前的位置离食物还有多远.
那么:找到食物的最优策略是什么呢?
(1). 搜寻目前离食物最近的鸟的周围区域 .
(2). 根据自己飞行的经验判断食物的所在。
PSO正是从这种模型中得到了启发:信息的社会共享
2. 算法介绍
(1)每个寻优的问题解都被想像成一只鸟,称为“粒子”。所有粒子都在一个D维空间进行搜索。
(2)所有的粒子都由一个fitness function 确定适应值以判断目前的位置好坏。
(3)每一个粒子必须赋予记忆功能,能记住所搜寻到的最佳位置。
(4)每一个粒子还有一个速度以决定飞行的距离和方向。这个速度根据它本身的飞行经验以及同伴的飞行经验进行动态调整。
粒子群优化算法求最优解在D维空间中,有N个粒子;
粒子i位置:x_i=(x_i1,x_i2,…x_iD),将xi代入适应函数f(x_i)求适应值;
粒子i速度:v_i=(v_i1,v_i2,…v_iD)
粒子i个体经历过的最好位置:pbest_i=(p_i1,p_i2,…p_iD)
种群所经历过的最好位置:gbest=(g1,g2,…gD)
通常,最优粒子第d(1≤d≤D)维的位置变化范围限定在[X_min,d, X_max,d] 内,每个粒子的速度变化范围限定在[-V_min,d, V_max,d]内(即在迭代中若相应粒子速度位置超出了边界值,则该维的速度或位置被限制为该维最大速度或边界位置)
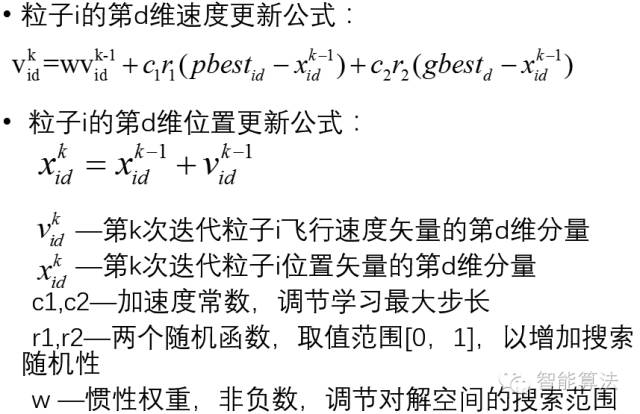
粒子速度更新公式包含三部分:
第一部分为粒子先前的速度
第二部分为“认知”部分,表示粒子本身的思考,可理解为粒子i当前位置与自己最好位置之间的距离。
第三部分为“社会”部分,表示粒子间的信息共享与合作,可理解为粒子i当前位置与群体最好位置之间的距离。
3. 算法流程图
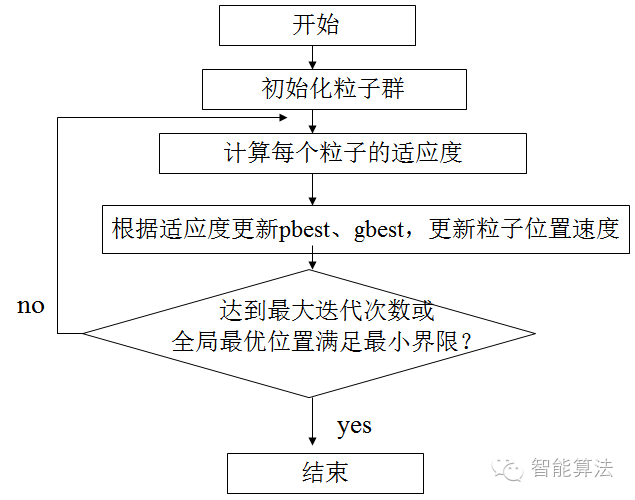
(1)Initial:
初始化粒子群体(群体规模为n),包括随机位置和速度。
(2)Evaluation:
根据fitness function ,评价每个粒子的适应度。
(3)Find the Pbest:
对每个粒子,将其当前适应值与其个体历史最佳位置(pbest)对应的适应值做比较,如果当前的适应值更高,则将用当前位置更新历史最佳位置pbest。
(4)Find the Gbest:
对每个粒子,将其当前适应值与全局最佳位置(gbest)对应的适应值做比较,如果当前的适应值更高,则将用当前粒子的位置更新全局最佳位置gbest。
(5)Update the Velocity:
根据公式更新每个粒子的速度与位置。
(6)如未满足结束条件,则返回步骤2
通常算法达到最大迭代次数G_max或者最佳适应度值的增量小于某个给定的阈值时算法停止。
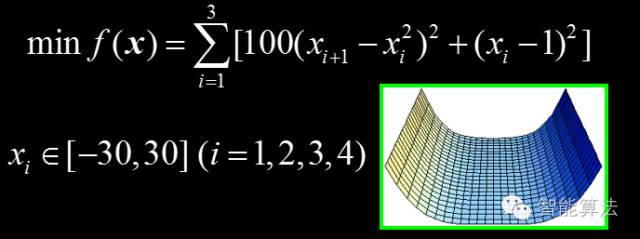
4. 算法举例
求解如下四维Rosenbrock函数的优化问题
 种群的数量:m=5,
种群的数量:m=5,
编码:因为问题的维数是4,所以粒子的位置和速度都是四维实数向量
设定粒子的速度范围(一般为位置的范围):V_max=60
对粒子群进行位置和速度的随机初始化,如下:
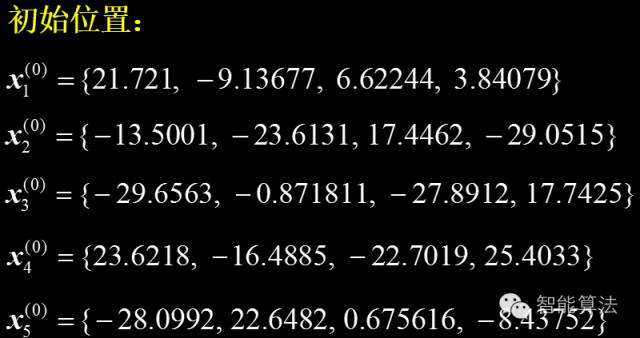
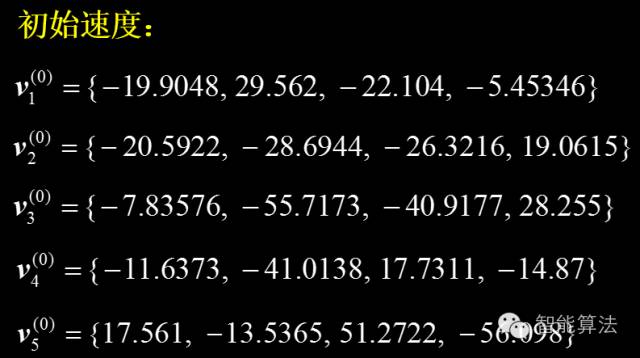
至此,每个粒子的初始位置和初始速度都已确定,接下来根据目标函数f(x)计算每个粒子的适应值:
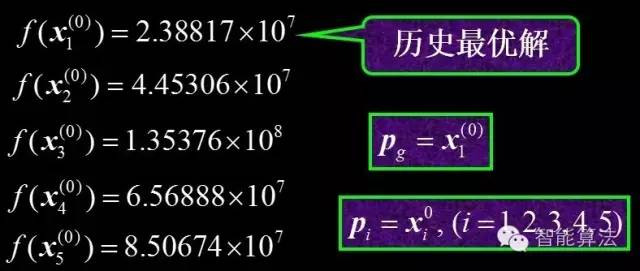
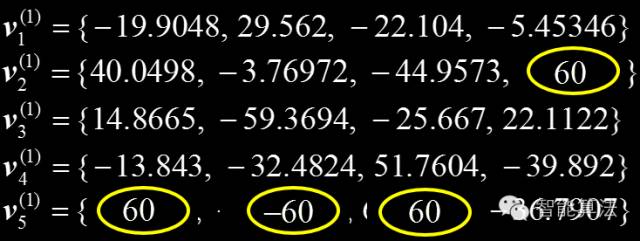
从适应值上我们可以得出群体历史最优解x_1,和个体历史最优解,每个解本身。接下来更新粒子位置和速度:设w=1,c_1=c_2=2,根据上面的速度位置更新函数,根据规则,每个粒子的速度和最优粒子位置超过限制将强行拉回边界,可以得到更新后的速度和位置如下:
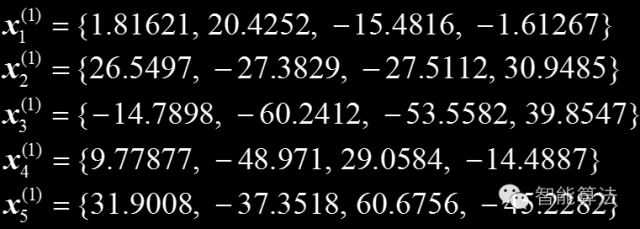
然后,根据新位置继续计算适应值,根据适应值替换全局历史最优粒子和个体历史最优粒子。直至达到最大迭代次数G_max或者最佳适应度值的增量小于某个给定的阈值时算法停止。
5. 小结
PSO从这种模型中得到启示并用于解决优化问题。PSO中,每个优化问题的解都是搜索空间中的一只鸟。我们称之为“粒子”。所有的粒子都有一个由被优化的函数决定的适应值(fitnessvalue),每个粒子还有一个速度决定他们飞翔的方向和距离。然后粒子们就追随当前的最优粒子在解空间中搜索。
免责声明:本文系网络转载。版权归原作者所有。如涉及版权,请联系删除!