
目标检测模型NanoDet(超轻量,速度很快)介绍和PyTorch版本实践
前言
YOLO、SSD、Fast R-CNN等模型在目标检测方面速度较快和精度较高,但是这些模型比较大,不太适合移植到移动端或嵌入式设备;轻量级模型 NanoDet-m,对单阶段检测模型三大模块(Head、Neck、Backbone)进行轻量化,目标加检测速度很快;模型文件大小仅几兆(小于4M)。
NanoDet作者开源代码地址:https://github.com/RangiLyu/nanodet (致敬)
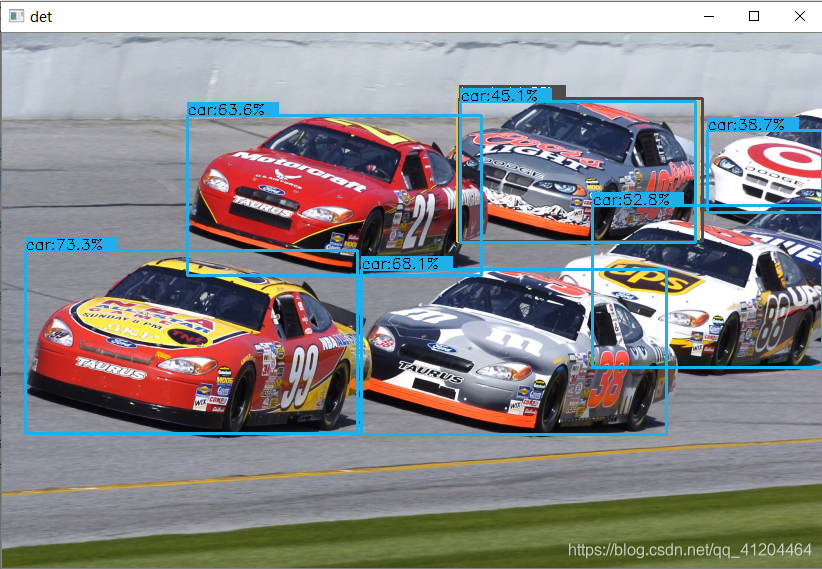
先看一下NanoDet目标检测的效果:
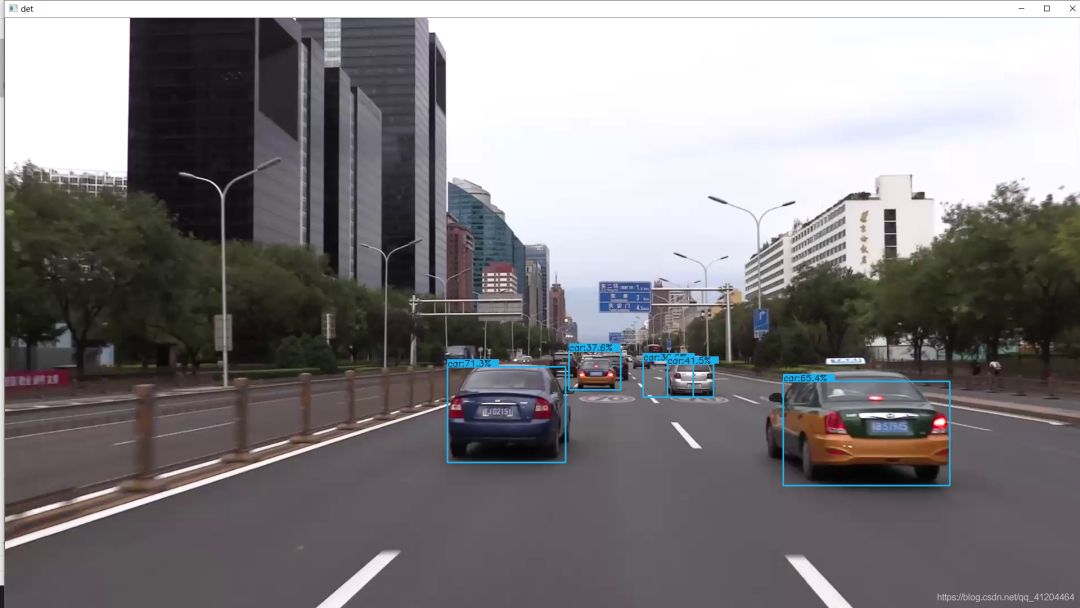
同时检测多辆汽车:
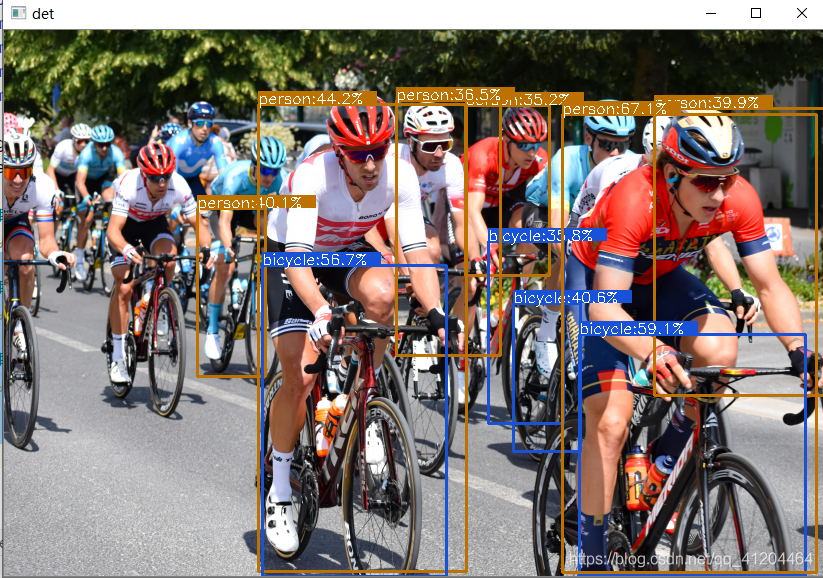
查看多目标、目标之间重叠、同时存在小目标和大目标的检测效果:
NanoDet 模型介绍
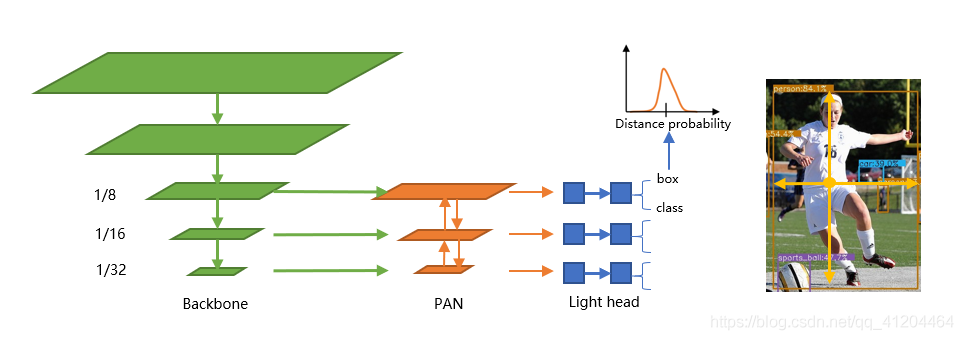
NanoDet 是一种 FCOS 式的单阶段 anchor-free 目标检测模型,它使用 ATSS 进行目标采样,使用 Generalized Focal Loss 损失函数执行分类和边框回归(box regression)。
1)NanoDet 模型性能
NanoDet-m模型和YoloV3-Tiny、YoloV4-Tiny作对比:
ModelResolutionCOCO mAPLatency(ARM 4xCore)FLOPSParams|Model Size(ncnn bin) |------ NanoDet-m320*32020.610.23ms0.72B0.95M|1.8mb NanoDet-m416*41621.716.44ms1.2B0.95M|1.8mb YoloV3-Tiny416*41616.637.6ms5.62B8.86M|33.7mb YoloV4-Tiny416*41621.732.81ms6.96B6.06M|23.0mb备注:以上性能基于 ncnn 和麒麟 980 (4xA76+4xA55) ARM CPU 获得的。使用 COCO mAP (0.5:0.95) 作为评估指标,兼顾检测和定位的精度,在 COCO val 5000 张图片上测试,并且没有使用 Testing-Time-Augmentation。
NanoDet作者将 ncnn 部署到手机(基于 ARM 架构的 CPU 麒麟 980,4 个 A76 核心和 4 个 A55 核心)上之后跑了一下 benchmark,模型前向计算时间只要 10 毫秒左右,而 yolov3 和 v4 tiny 均在 30 毫秒的量级。在安卓摄像头 demo app 上,算上图片预处理、检测框后处理以及绘制检测框的时间,NanoDet 也能轻松跑到 40+FPS。
2)NanoDet 模型架构
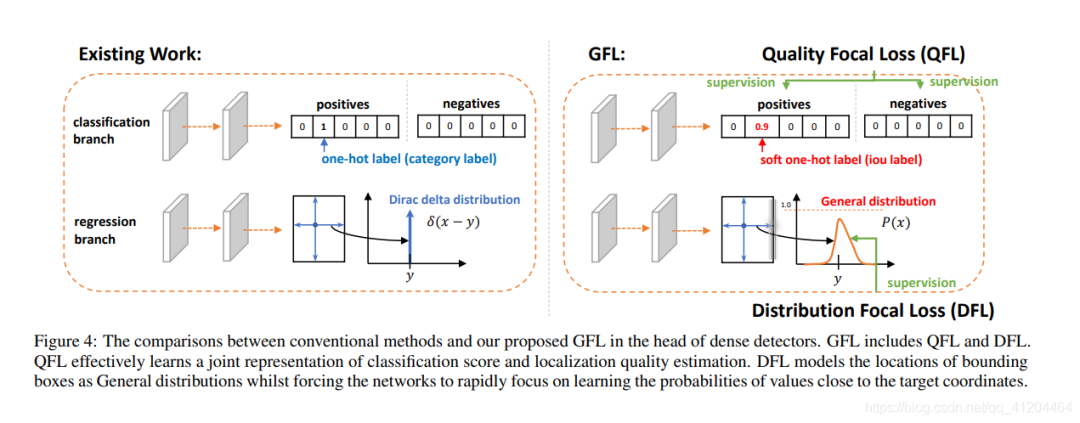
3)NanoDet损失函数
NanoDet 使用了李翔等人提出的 Generalized Focal Loss 损失函数。该函数能够去掉 FCOS 的 Centerness 分支,省去这一分支上的大量卷积,从而减少检测头的计算开销,非常适合移动端的轻量化部署。
详细请参考:
4)NanoDet 优势
NanoDet 是一个速度超快和轻量级的移动端 Anchor-free 目标检测模型。该模型具备以下优势:
超轻量级:模型文件大小仅几兆(小于4M——nanodet_m.pth);- 速度超快:在移动 ARM CPU 上的速度达到 97fps(10.23ms);- 训练友好:GPU 内存成本比其他模型低得多。GTX1060 6G 上的 Batch-size 为 80 即可运行;- 方便部署:提供了基于 ncnn 推理框架的 C++ 实现和 Android demo。
基于PyTorch 实现NanoDet
基于NanoDet项目进行小裁剪,专门用来实现Python语言、PyTorch 版本的代码地址:
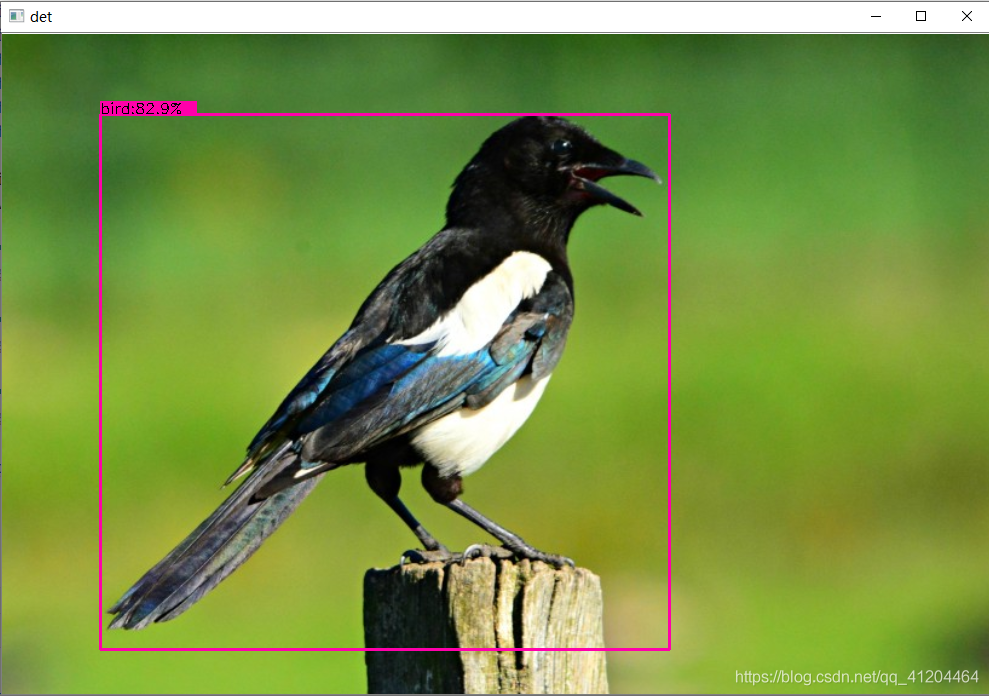
1)NanoDet目标检测效果
1)检测出一只小鸟
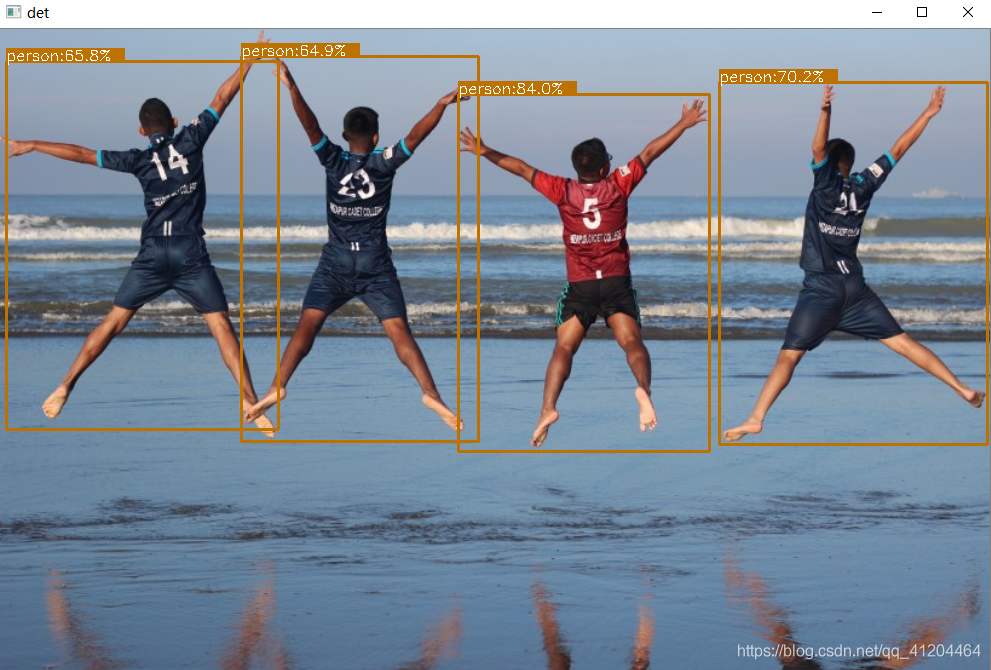
2)同时检测出四位少年
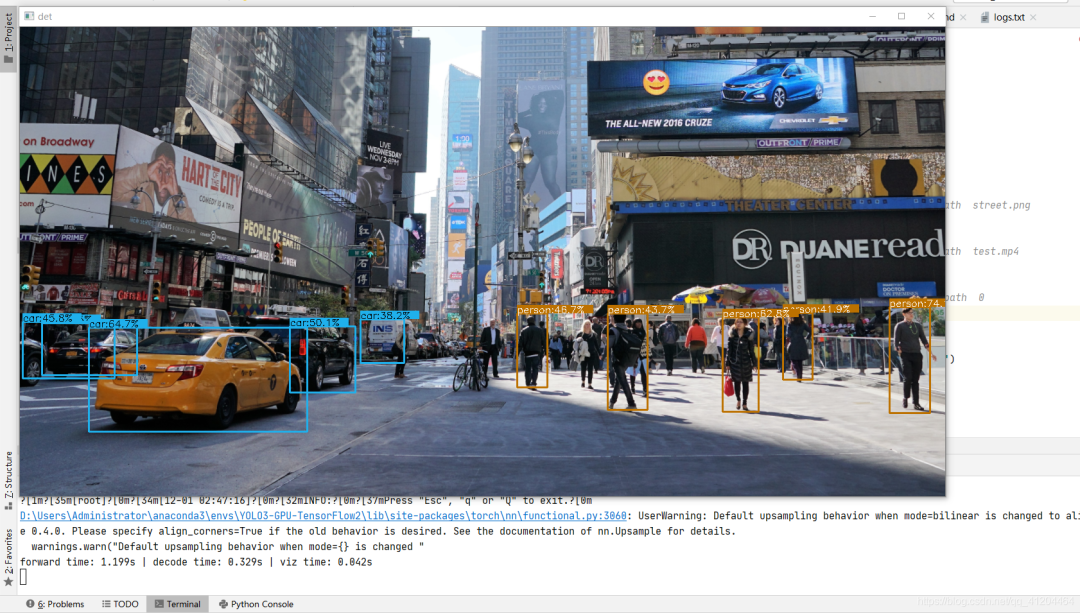
3)在复杂街道中,检测出行人、汽车:

通过测试发现NanoDet确实很快,但识别精度和效果比YOLOv4差不少的。
下图是使用 YOLOv4检测的效果:
文章链接:
大家可以看到大部分的行人、汽车是被检测出来了,存在小部分没有被检测出来;

看左上角的统计信息,能看到汽车检测到5辆,行人检测到14位,自行车检测到1辆,交通灯设备3台,太阳伞3把,手提包1个。
2)环境参数
测试环境参数
系统:Windows ** 编程语言**:Python 3.8 整合开发环境:Anaconda深度学习框架:PyTorch1.7.0+cu101 (torch>=1.3 即可) 开发代码IDE:PyCharm
开发具体环境要求如下:
Cython- termcolor- numpy- torch>=1.3- torchvision- tensorboard- pycocotools- matplotlib- pyaml- opencv-python- tqdm
通常测试感觉GPU加速(显卡驱动、cudatoolkit 、cudnn)、PyTorch、pycocotools相对难装一点
Windows开发环境安装可以参考:
安装cudatoolkit 10.1、cudnn7.6请参考
安装PyTorch请参考
安装pycocotools请参考
3)体验NanoDet目标检测
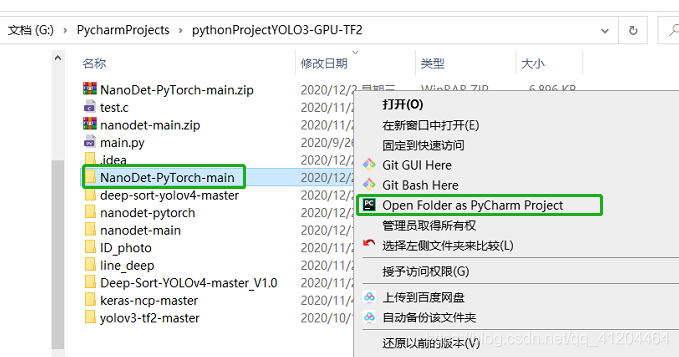
下载代码,打开工程
先到githug下载代码,然后解压工程,然后使用PyCharm工具打开工程;
githug代码下载地址:
说明:该代码是基于NanoDet项目进行小裁剪,专门用来实现Python语言、PyTorch 版本的代码NanoDet作者开源代码地址: (致敬)
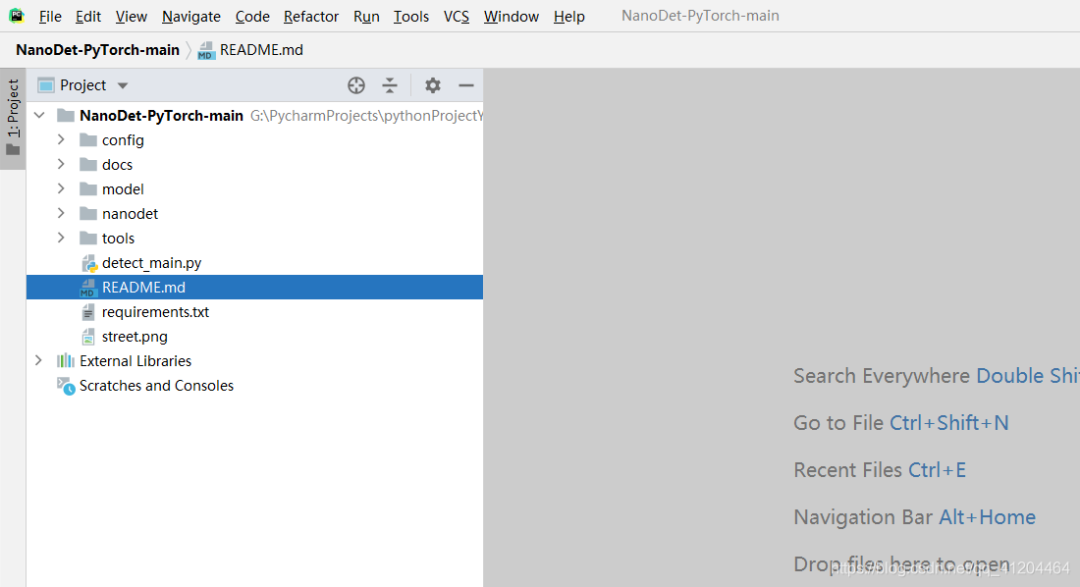
使用PyCharm工具打开工程
打开后的页面是这样的:
【选择开发环境】
文件(file)——>设置(setting)——>项目(Project)——>Project Interpreters 选择搭建的开发环境;
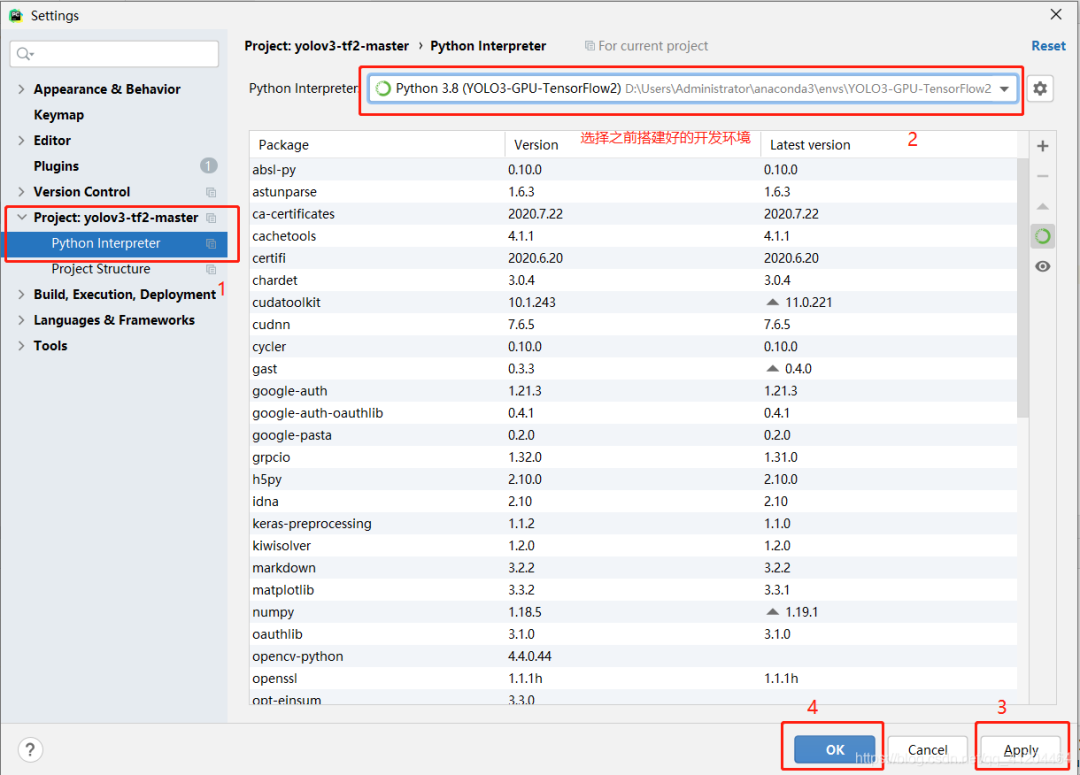
然后先点击Apply,等待加载完成,再点击OK;
进行目标检测
具体命令请参考:
'''目标检测-图片'''
python detect_main.py image --config ./config/nanodet-m.yml --model model/nanodet_m.pth --path street.png
'''目标检测-视频文件'''
python detect_main.py video --config ./config/nanodet-m.yml --model model/nanodet_m.pth --path test.mp4
'''目标检测-摄像头'''
python detect_main.py webcam --config ./config/nanodet-m.yml --model model/nanodet_m.pth --path 0
【目标检测-图片】
【目标检测-视频文件】
检测的是1080*1920的图片,很流畅毫不卡顿,就是目前识别精度不太高
4)调用模型的核心代码
detect_main.py 代码:
import cv2
import os
import time
import torch
import argparse
from nanodet.util import cfg, load_config, Logger
from nanodet.model.arch import build_model
from nanodet.util import load_model_weight
from nanodet.data.transform import Pipeline
image_ext = ['.jpg', '.jpeg', '.webp', '.bmp', '.png']
video_ext = ['mp4', 'mov', 'avi', 'mkv']
'''目标检测-图片'''
# python detect_main.py image --config ./config/nanodet-m.yml --model model/nanodet_m.pth --path street.png
'''目标检测-视频文件'''
# python detect_main.py video --config ./config/nanodet-m.yml --model model/nanodet_m.pth --path test.mp4
'''目标检测-摄像头'''
# python detect_main.py webcam --config ./config/nanodet-m.yml --model model/nanodet_m.pth --path 0
def parse_args():
parser = argparse.ArgumentParser()
parser.add_argument('demo', default='image', help='demo type, eg. image, video and webcam')
parser.add_argument('--config', help='model config file path')
parser.add_argument('--model', help='model file path')
parser.add_argument('--path', default='./demo', help='path to images or video')
parser.add_argument('--camid', type=int, default=0, help='webcam demo camera id')
args = parser.parse_args()
return args
class Predictor(object):
def __init__(self, cfg, model_path, logger, device='cuda:0'):
self.cfg = cfg
self.device = device
model = build_model(cfg.model)
ckpt = torch.load(model_path, map_location=lambda storage, loc: storage)
load_model_weight(model, ckpt, logger)
self.model = model.to(device).eval()
self.pipeline = Pipeline(cfg.data.val.pipeline, cfg.data.val.keep_ratio)
def inference(self, img):
img_info = {}
if isinstance(img, str):
img_info['file_name'] = os.path.basename(img)
img = cv2.imread(img)
else:
img_info['file_name'] = None
height, width = img.shape[:2]
img_info['height'] = height
img_info['width'] = width
meta = dict(img_info=img_info,
raw_img=img,
img=img)
meta = self.pipeline(meta, self.cfg.data.val.input_size)
meta['img'] = torch.from_numpy(meta['img'].transpose(2, 0, 1)).unsqueeze(0).to(self.device)
with torch.no_grad():
results = self.model.inference(meta)
return meta, results
def visualize(self, dets, meta, class_names, score_thres, wait=0):
time1 = time.time()
self.model.head.show_result(meta['raw_img'], dets, class_names, score_thres=score_thres, show=True)
print('viz time: {:.3f}s'.format(time.time()-time1))
def get_image_list(path):
image_names = []
for maindir, subdir, file_name_list in os.walk(path):
for filename in file_name_list:
apath = os.path.join(maindir, filename)
ext = os.path.splitext(apath)[1]
if ext in image_ext:
image_names.append(apath)
return image_names
def main():
args = parse_args()
torch.backends.cudnn.enabled = True
torch.backends.cudnn.benchmark = True
load_config(cfg, args.config)
logger = Logger(-1, use_tensorboard=False)
predictor = Predictor(cfg, args.model, logger, device='cuda:0')
logger.log('Press "Esc", "q" or "Q" to exit.')
if args.demo == 'image':
if os.path.isdir(args.path):
files = get_image_list(args.path)
else:
files = [args.path]
files.sort()
for image_name in files:
meta, res = predictor.inference(image_name)
predictor.visualize(res, meta, cfg.class_names, 0.35)
ch = cv2.waitKey(0)
if ch == 27 or ch == ord('q') or ch == ord('Q'):
break
elif args.demo == 'video' or args.demo == 'webcam':
cap = cv2.VideoCapture(args.path if args.demo == 'video' else args.camid)
while True:
ret_val, frame = cap.read()
meta, res = predictor.inference(frame)
predictor.visualize(res, meta, cfg.class_names, 0.35)
ch = cv2.waitKey(1)
if ch == 27 or ch == ord('q') or ch == ord('Q'):
break
if __name__ == '__main__':
main()

Python“宝藏级”公众号【Python之王】专注于Python领域,会爬虫,数分,C++,tensorflow和Pytorch等等。
近 2年共原创 100+ 篇技术文章。创作的精品文章系列有:
日常收集整理了一批不错的 Python 学习资料,有需要的小伙可以自行免费领取。
获取方式如下:公众号回复资料。领取Python等系列笔记,项目,书籍,直接套上模板就可以用了。资料包含算法、python、算法小抄、力扣刷题手册和 C++ 等学习资料!