
深度学习的多个loss如何平衡?
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

来自 | 知乎 编辑 | 深度学习这件小事
链接 | https://www.zhihu.com/question/375794498
本文仅供交流,如有侵权,请联系删除
字节跳动研究员
https://www.zhihu.com/question/375794498/answer/1052779937
其实这是目前深度学习领域被某种程度上忽视了的一个重要问题,在近几年大火的multi-task learning,generative adversarial networks, 等等很多机器学习任务和方法里面都会遇到,很多paper的做法都是暴力调参结果玄学……这里偷偷跟大家分享两个很有趣的研究视角:
1. 从预测不确定性的角度引入Bayesian框架,根据各个loss分量当前的大小自动设定其权重。有代表性的工作参见Alex Kendall等人的CVPR2018文章 Multi-Task Learning Using Uncertainty to Weigh Losses for Scene Geometry and Semantics,https://arxiv.org/abs/1705.07115。文章的二作Yarin Gal是Zoubin Ghahramani的高徒,近几年结合Bayesian思想和深度学习做了很多solid的工作。
2. 构建所有loss的Pareto,以一次训练的超低代价得到多种超参组合对应的结果。有代表性的工作参见Intel在2018年NeurIPS(对,就是那个刚改了名字的机器学习顶会)发表的Multi-Task Learning as Multi-Objective Optimization,http://papers.nips.cc/paper/7334-multi-task-learning-as-multi-objective-optimization。因为跟文章的作者都是老熟人,这里就不尬吹了,大家有兴趣的可以仔细读一读,干货满满。
深动科技联合创始人
https://www.zhihu.com/question/375794498/answer/1050963528
1. 一般都是多个loss之间平衡,即使是单任务,也会有weight decay项。比较简单的组合一般通过调超参就可以。
2. 对于比较复杂的多任务loss之间平衡,这里推荐一篇通过网络直接预测loss权重的方法[1]。以两个loss为例, 和 由网络输出,由于整体loss要求最小,所以前两项希望 越大越好,为防止退化,最后第三项则希望越小越好。当两个loss中某个比较大时,其对应的也会取较大值,使得整体loss最小化,也就自然处理量纲不一致或某个loss方差较大问题。

该方法后来被拓展到了物体检测领域[2],用于考虑每个2D框标注可能存在的不确定性问题。
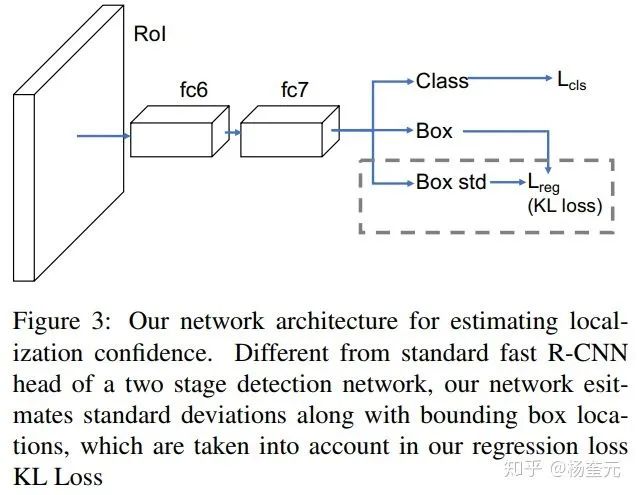
[1] Alex Kendall, Yarin Gal, Roberto Cipolla. Multi-Task Learning Using Uncertainty to Weigh Losses for Scene Geometry and Semantics. CVPR, 2018.
[2] Yihui He, Chenchen Zhu, Jianren Wang, Marios Savvides, Xiangyu Zhang. Bounding Box Regression with Uncertainty for Accurate Object Detection. CVPR, 2019.
自动驾驶程序员
https://www.zhihu.com/question/375794498/answer/1056695768
本文来自知乎问答,回答已获作者授权,禁止二次转载。
Focal loss 会根据每个task的表现帮你自动调整这些参数的。
我们的做法一般是先分几个stage 训练。stage 0 : task 0, stage 1: task 0 and 1. 以此类推。在stage 1以后都用的是focal loss。
是这样的。
首先对于每个 Task,你有个 Loss Function,以及一个映射到 [0, 1] 的 KPI (key performance indicator) 。比如对于分类任务, Loss function 可以是 cross entropy loss,KPI 可以是 Accuracy 或者 Average Precision。对于 regression 来说需要将 IOU 之类的归一化到 [0, 1] 之间。KPI 越高表示这个任务表现越好。
对于每个进来的 batch,每个Task_i 有个 loss_i。每个Task i 还有个不同的 KPI: k_i。那根据 Focal loss 的定义,FL(k_i, gamma_i) = -((1 - k_i)^gamma_i) * log(k_i)。一般来说我们gamma 取 2。
于是对于这个 batch 来说,整个 loss = sum(FL(k_i, gamma_i) * loss_i)
在直观上说,这个 FL,当一个任务的 KPI 接近 0 的时候会趋于无限大,使得你的 loss 完全被那个表现不好的 task 给 dominate。这样你的back prop 就会让所有的权重根据那个kpi 不好的任务调整。当一个任务表现特别好 KPI 接近 1 的时候,FL 就会是0,在整个 loss 里的比重也会变得很小。
当然根据学习的速率不同有可能一开始学的不好的task后面反超其他task。http://svl.stanford.edu/assets/papers/guo2018focus.pdf 这篇文章里讲了如何像momentum 一样的逐渐更新 KPI。
由于整个 loss 里现在也要对 KPI 求导,所以文章里还有一些对于 KPI 求导的推导。
当然我们也说了,KPI 接近 0 时,Loss 会变得很大,所以一开始训练的时候不要用focal loss,要确保网络的权重更新到一定时候再加入 focal loss。
希望大家训练愉快。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~