论文速递:金字塔Transformer,更适合稠密预测任务的Transformer骨干架构
极市导读
本文是南京大学&港中文&南理工&商汤在Transformer方面的又一次探索,该文主要针对稠密预测任务的骨干的Transformer架构设计进行了一次创新性的探索,将特征金字塔结构与Transformer进行了一次融合,使其可以更好的输出多尺度特征,进而更方便与其他下游任务相结合。 >>加入极市CV技术交流群,走在计算机视觉的最前沿
本文是南京大学&港中文&南理工&商汤在Transformer方面的又一次探索,该文主要针对稠密预测任务的骨干的Transformer架构设计进行了一次创新性的探索,将特征金字塔结构与Transformer进行了一次融合,使其可以更好的输出多尺度特征,进而更方便与其他下游任务相结合。本文为Transformer在计算机视觉领域的应用提供了一个非常好的开头,期待有更优秀的Transformer在CV领域的应用于探索。
Abstract
以CNN为骨干的方案在计算机视觉的各个领域均取得极大的成功,本文研究了一种简单的无卷积骨干网络用于诸多稠密预测任务(包含检测、分割等)。近来提出的Transformer(ViT)主要是针对图像分类任务而设计,我们提出稠密预测任务提出了一种PVT方案(Pyramid Vision Transformer),它克服了将ViT向稠密预测任务迁移的困难。
(1) 不同于ViT的低分辨率输出、高计算复杂度与内存消耗,PVT不仅可以得到更高分辨率的输出(这对于稠密预测任务尤为重要),同时按照金字塔形式渐进式收缩特征分辨率;
(2) PVT继承了CNN与Transformer的优势,通过简单的替换CNN骨干使其成为不同视觉任务的统一骨干结构;
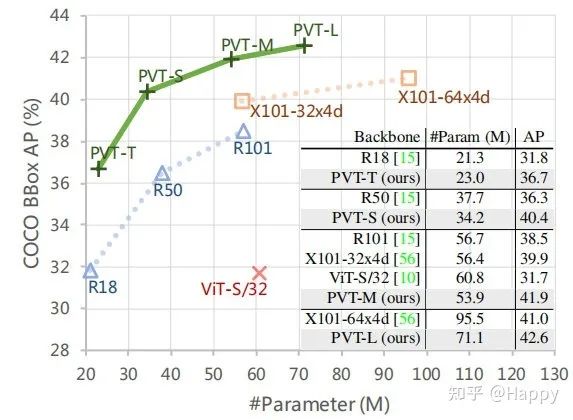
(3) 通过充分的实验验证了PVT的优越性,在目标检测、语义分割、实例分割等任务上PVT均取得了优异性能。比如RetinaNet+PVT在COCO数据集上取得了40.4AP指标,超越了RetinaNet+ResNet50的36.3AP。
Method
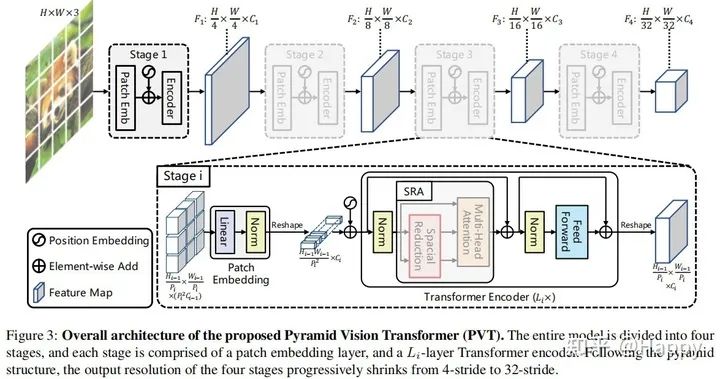
本文旨在将金字塔结构嵌入到Transformer结构用于生成多尺度特征,并最终用于稠密预测任务。上图给出了本文所提PVT的架构示意图,类似与CNN骨干结构,PVT同样包含四个阶段用于生成不同尺度的特征,所有阶段具有相类似的结构:Patch Embedding+Transformer Encoder。
在第一个阶段,给定尺寸为的输入图像,我们按照如下流程进行处理:
首先,将其划分为的块(这里是为了与ResNet对标,最大输出特征的尺寸为原始分辨率的1/4),每个块的大小为; 然后,将展开后的块送入到线性投影曾得到尺寸为的嵌入块; 其次,将前述嵌入块与位置嵌入信息送入到Transformer的Encoder,其输出将为reshap为.
采用类似的方式,我们以前一阶段的输出作为输入即可得到特征。基于特征金字塔,所提方案可以轻易与大部分下游任务(如图像分类、目标检测、语义分割)进行集成。
Feature Pyramid for Transformer
不同于CNN采用stride卷积获得多尺度特征,PVT通过块嵌入曾按照progressive shrinking策略控制特征的尺度。
我们假设第i阶段的块尺寸为,在每个阶段的开始,我们将输入特征均匀的拆分为个块,然后每个块展开并投影到维度的嵌入信息,经过线性投影后,嵌入块的尺寸可以视作。通过这种方式我们就可以灵活的调整每个阶段的特征尺寸,使其可以针对Transformer构建特征金字塔。该过程的code描述如下:
class PatchEmbed(nn.Module):""" Image to Patch Embedding"""def __init__(self, img_size=224, patch_size=16, in_chans=3, embed_dim=768):super().__init__()img_size = to_2tuple(img_size)patch_size = to_2tuple(patch_size)self.img_size = img_sizeself.patch_size = patch_sizeassert img_size[0] % patch_size[0] == 0 and img_size[1] % patch_size[1] == 0, \f"img_size {img_size} should be divided by patch_size {patch_size}."self.H, self.W = img_size[0] // patch_size[0], img_size[1] // patch_size[1]self.num_patches = self.H * self.Wself.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)self.norm = nn.LayerNorm(embed_dim)def forward(self, x):B, C, H, W = x.shapex = self.proj(x).flatten(2).transpose(1, 2)x = self.norm(x)H, W = H // self.patch_size[0], W // self.patch_size[1]return x, (H, W)
从实现上来看,其实这里还是通过stride=2的卷积进行的实现,汗一个。
Transformer Encoder
对于Transformer encoder的第i阶段,它具有个encoder层,每个encoder层由注意力层与MLP构成。由于所提方法需要处理高分辨率特征,所以我们提出了一种SRA(spatial-reduction attention)用于替换传统的MHA(multi-head-attention)。
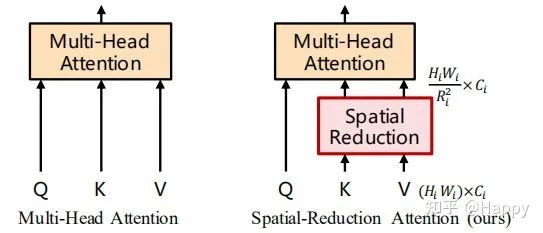
类似于MHA,SRA同样从输入端接收到了Q、K、V作为输入,并输出精炼后特征。SRA与MHA的区别在于:SRA会降低K和V的空间尺度,见上图。SRA的处理过程可以描述如下:
也就是说每个head的维度等于,为空间尺度下采样操作,定义如下:
其他的就跟MHA没什么区别了,这里提供一下SRA的code实现,关键区别就是sr_ratio相关的那一部分。
class Attention(nn.Module):def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., sr_ratio=1):super().__init__()assert dim % num_heads == 0, f"dim {dim} should be divided by num_heads {num_heads}."self.dim = dimself.num_heads = num_headshead_dim = dim // num_headsself.scale = qk_scale or head_dim ** -0.5self.q = nn.Linear(dim, dim, bias=qkv_bias)self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)self.attn_drop = nn.Dropout(attn_drop)self.proj = nn.Linear(dim, dim)self.proj_drop = nn.Dropout(proj_drop)self.sr_ratio = sr_ratioif sr_ratio > 1:self.sr = nn.Conv2d(dim, dim, kernel_size=sr_ratio, stride=sr_ratio)self.norm = nn.LayerNorm(dim)def forward(self, x, H, W):B, N, C = x.shapeq = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)if self.sr_ratio > 1:x_ = x.permute(0, 2, 1).reshape(B, C, H, W)x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)x_ = self.norm(x_)kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)else:kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)k, v = kv[0], kv[1]attn = (q @ k.transpose(-2, -1)) * self.scaleattn = attn.softmax(dim=-1)attn = self.attn_drop(attn)x = (attn @ v).transpose(1, 2).reshape(B, N, C)x = self.proj(x)x = self.proj_drop(x)return xModel Details
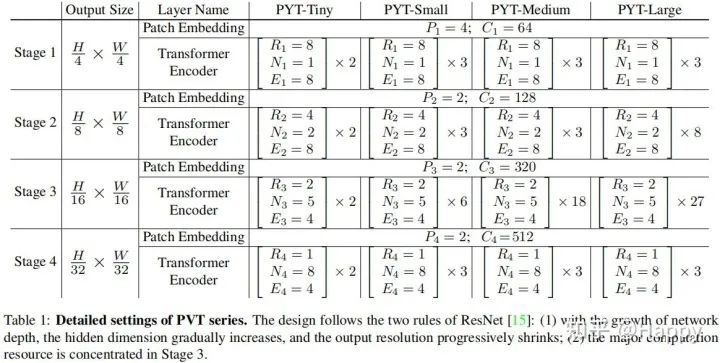
总而言之,所提方案涉及的超参数包含如下:
:阶段i的块尺寸; :阶段i的通道数; :阶段i的encoder层数; :阶段i中SRA的下采样比例; :阶段i的head数量; :阶段i中MLP的扩展比例。
延续ResNet的设计准则,我们在浅层采用较小的输出通道数;在中间阶段聚焦主要的计算量。为更好的讨论与分析,我们设计了不同大小的PVT模型,定义见下表。
Experiments
为说明所提方案的有效性,我们在图像分类、目标检测、语义分割、实例分割等任务上进行了对比分析。
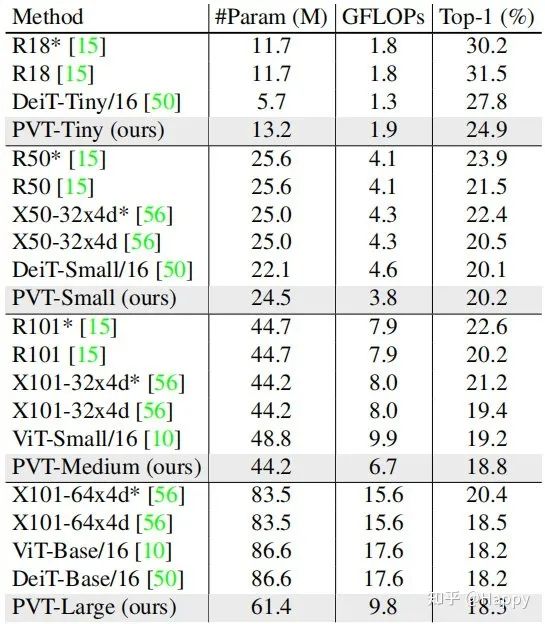
首先,我们来看一下ImageNet数据集上的性能对比,结果见上表。从中可以看到:
相比CNN,在同等参数量与计算约束下,PVT-Small达到20.2%的误差率,优于ResNet50的21.5%; 相比其他Transformer(如ViT、DeiT),所提PVT以更少的计算量取得了相当的性能。
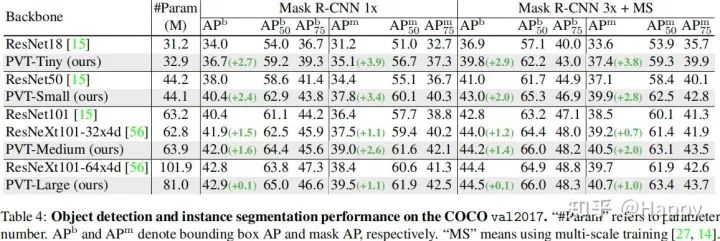
然后,我们再来看一下目标检测方面的性能对比,结果见上表。从中可以看到:在参数量相当的情况下,PVT显著性的优于CNN方案,这说明PVT是一个CNN之外的一个好的选择。类似的现象在Mask RCNN体系下仍可发现,见下表。
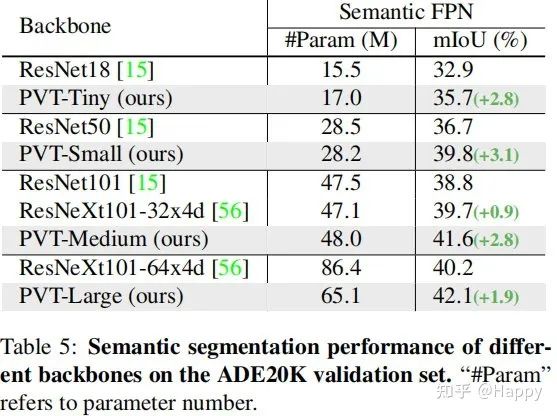
其次,我们看一下所提方案在语义分割中的性能对比,见上表。可以看到:不同参数配置下,PVT均可取得优于ResNet与ResNeXt的性能。这侧面说明:相比CNN,受益于全局注意力机制,PVT可以提取更好的特征用于语义分割。
全文到此结束,更多消融实验与分析建议各位同学查看原文。
推荐阅读
2021-01-12
2021-01-05
2020-12-06

# CV技术社群邀请函 #
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~