
CorrNet3D:基于无监督的非刚性点云配准网络 (CVPR2021)
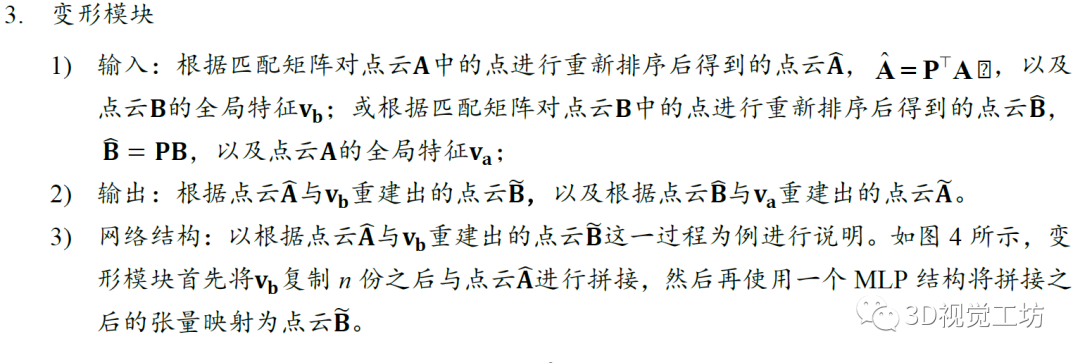
论文、代码地址:在公众号「3D视觉工坊」,后台回复「CorrNet3D」,即可直接下载。

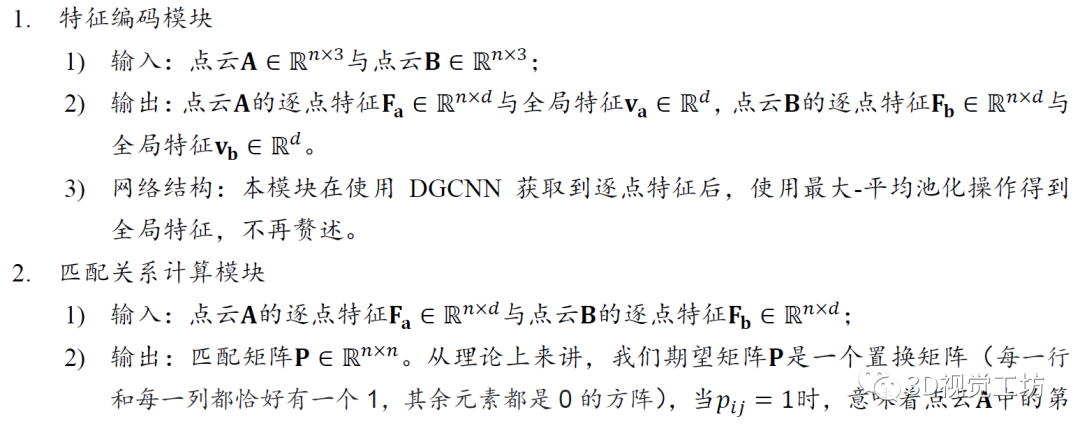


四、实验结果
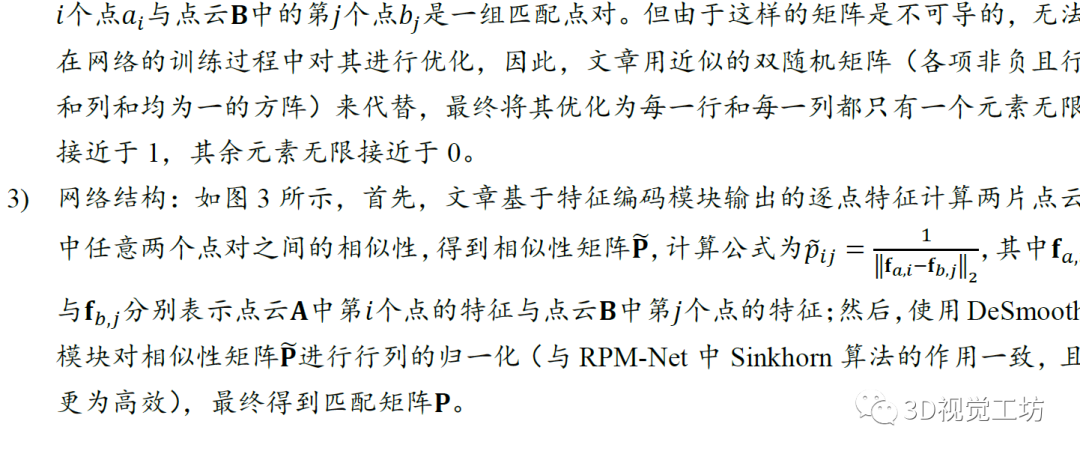
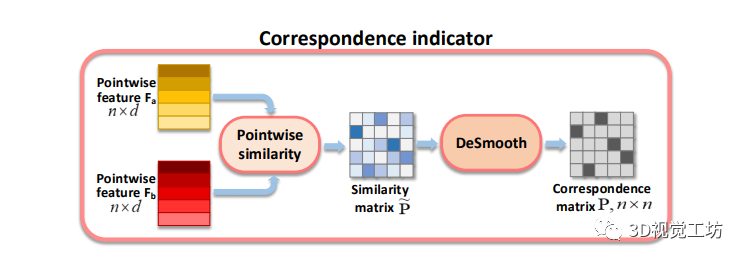
文章在真实的非刚性形变数据集与合成的刚性形变数据集上进行了实验,同时还针对刚性点云匹配关系的确定进行了实验,与DeepGFM、DCP与RPMNet进行了对比,详细实验设置请参照原论文。
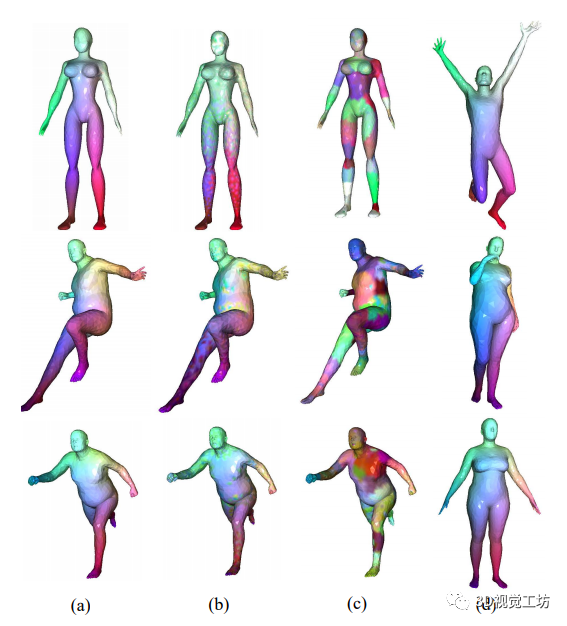
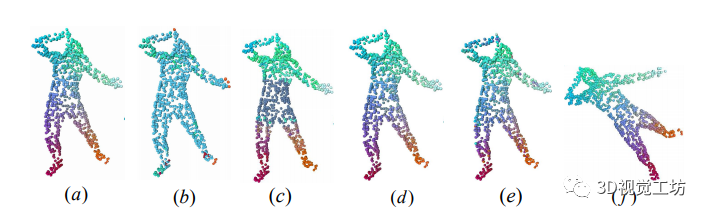
下图中(a)、(d)展示了ground-truth的匹配关系,图(c)是DeepGFM的结果,图(b)是本文模型的结果。

原创征稿
3D视觉工坊是基于优质原创文章的自媒体平台,创始人和合伙人致力于发布3D视觉领域最干货的文章,然而少数人的力量毕竟有限,知识盲区和领域漏洞依然存在。为了能够更好地展示领域知识,现向全体粉丝以及阅读者征稿,如果您的文章是3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、硬件选型、求职分享等方向,欢迎砸稿过来~文章内容可以为paper reading、资源总结、项目实战总结等形式,公众号将会对每一个投稿者提供相应的稿费,我们支持知识有价!
▲长按关注公众号
评论