ECCV 2020 论文大盘点-6D 位姿估计篇
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
本文盘点ECCV 2020 中所有与物体6D位姿估计(6D Object Pose Estimation)相关的论文,总计 5 篇。
这 5 项工作均有视频演示,可让我们更直观了解这些工作。
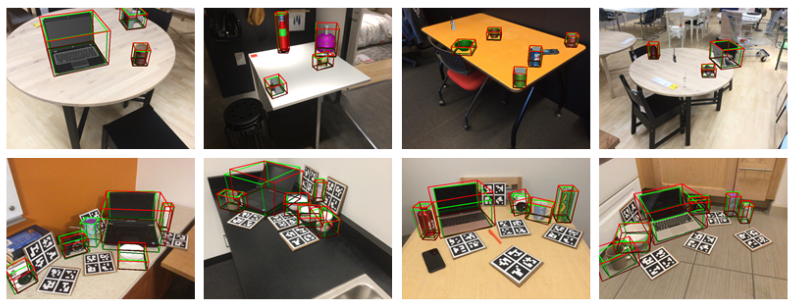
[2]. Neural Object Learning for 6D Pose Estimation Using a Few Cluttered Images
作者 | Kiru Park, Timothy Patten, Markus Vincze
单位 | TU Wien
论文 | https://arxiv.org/abs/2005.03717
代码 | https://github.com/kirumang/NOL
数据集 | https://www.acin.tuwien.ac.at/en/vision-for-robotics/software-tools/smot/
备注 | ECCV 2020 Spotlight
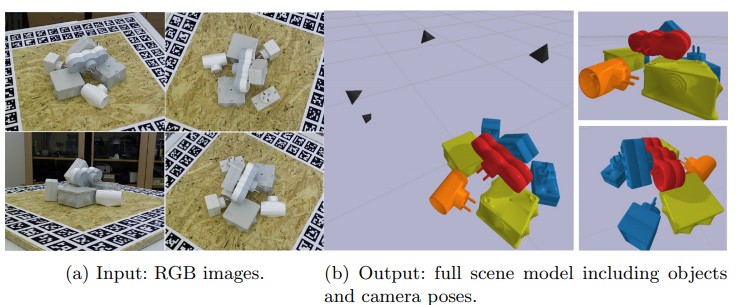
[3]. CosyPose: Consistent multi-view multi-object 6D pose estimation
多视角多物体6D姿态估计
作者 | Yann Labbé, Justin Carpentier, Mathieu Aubry, Josef Sivic
单位 | 巴黎文理研究大学;INRIA等
论文 | https://arxiv.org/abs/2008.08465
代码 | https://github.com/ylabbe/cosypose
主页 | https://www.di.ens.fr/willow/research/cosypose/
备注 | ECCV 2020
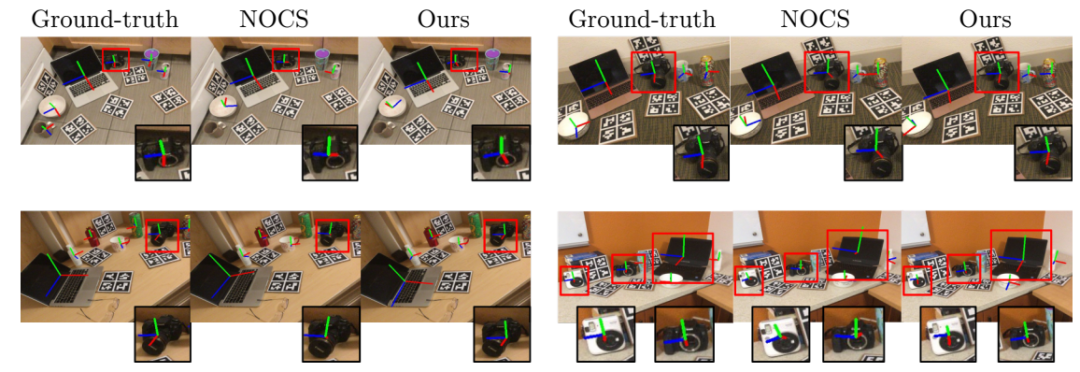
[4]. Category Level Object Pose Estimation via Neural Analysis-by-Synthesis
作者 | Xu Chen, Zijian Dong, Jie Song, Andreas Geiger, Otmar Hilliges
单位 | 苏黎世联邦理工学院;图宾根大学等
论文 | https://arxiv.org/abs/2008.08145
主页 | https://ait.ethz.ch/projects/2020/neural-object-fitting/
备注 | ECCV 2020
[5]. Shape Prior Deformation for Categorical 6D Object Pose and Size Estimation
6D物体姿态和尺寸估计
作者 | Meng Tian, Marcelo H Ang Jr, Gim Hee Lee
单位 | 新加坡国立大学
论文 | https://arxiv.org/abs/2007.08454
代码 | https://github.com/mentian/object-deformnet
备注 | ECCV 2020