Model Globally, Match Locally 论文名字用 4 个词高度总结了 PPF 算法的精髓:“整体建模,局部匹配”。下面研读一下摘要(Abstarct):
[1] This paper addresses the problem of recognizing free form 3D objects in point clouds.
第一句话表明论文的研究方向与问题:3D物体点云(free form)的识别
[2] Compared to traditional approaches based on point descriptors, which depend on local information around points, we propose a novel method that creates a global model description based on oriented point pair features and matches that model locally using a fast voting scheme.
第二句话既表明论文的创新点(与前人方法的区别),又用一句话总结本文的中心思想。
·Model Globally: creates a global model description based on oriented point pair features
·Match Locally: matches that model locally using a fast voting scheme
[3] The global model description consists of all model point pair features and represents a mapping from the point pair feature space to the model, where similar features on the model are grouped together.
第三句话紧接着解释了什么是 global model description
[4] Such representation allows using much sparser object and scene point clouds, resulting in very fast performance.
第四句话说明这种 representation 的优点:稀疏采样,提升算法速度
[5] Recognition is done locally using an efficient voting scheme on a reduced two-dimensional search space.
第五句话表明如何实现 recognition:使用有效的投票机制在二维搜索空间里做局部匹配
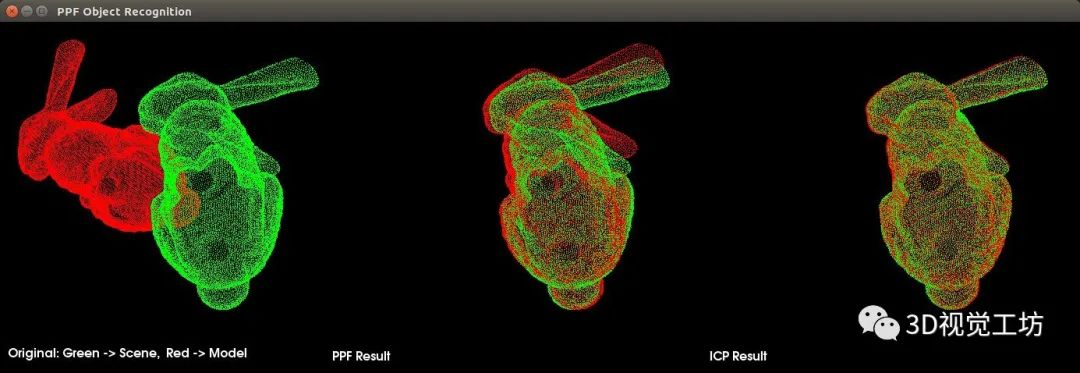
[6] We demonstrate the efficiency of our approach and show its high recognition performance in the case of noise, clutter and partial occlusion.
第六句话表明本文算法针对的场景问题:干扰、堆叠、部分遮挡
[7] Compared to state of the art approaches we achieve better recognition rates, and demonstrate that with a slight or even no sacrifice of the recognition performance our method is much faster then the current state of the art approaches.
第七句话说明通过与 SOTA 方法的对比,文中提出的方法既保证了高的识别率,又在不牺牲识别性能的情况下提升了算法的速度。
接下来看一下论文的算法:
1. Model Globally
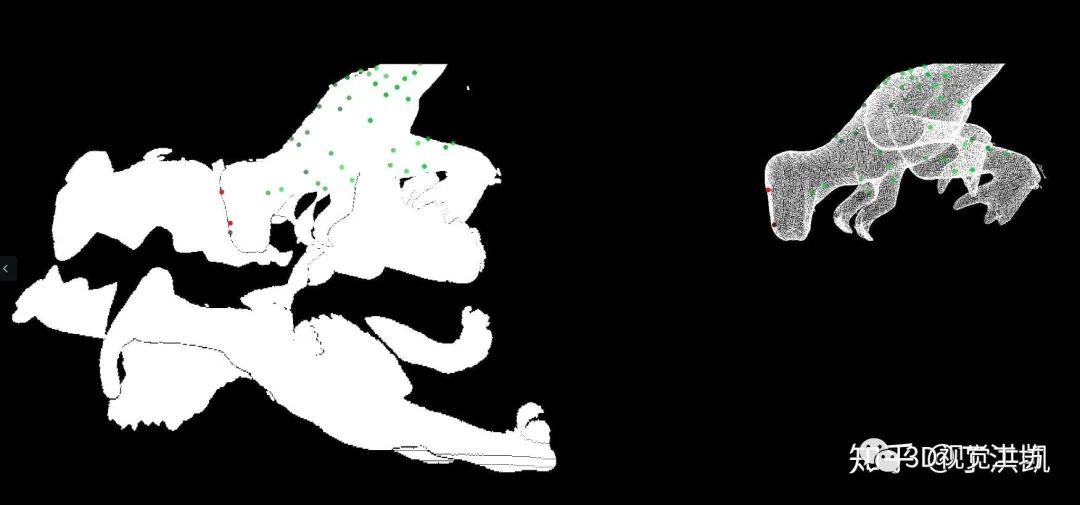
首先定义两个词:scene 和 model ,scene 是我们测得的真实场景(点云),model 是物体的真实模型(点云)。
Both the scene and the model are represented as a finite set of oriented points, where a normal is associated with each point.
符号表示:
points in the scene
points in the model
(1)Point Pair Feature (PPF)
Model Gobally 的本质是通过定义 Point Pair Feature,来构建特征矢量的集合以及每个特征矢量对应的点对集,作为 Global Model Desciption。所以,首先先定义 PPF。
PPF 描述了两个有向点(oriented points)的相对位置和姿态。
假设有两个点 和 ,法向量(normals)分别为 和 , ,则 PPF 定义为:
注: 为两个矢量的夹角,且 是非对称的。PPF 示意图见 Figure2.(a)。
有了 Point Pair Feature,就可以用其来定义 Global Model Description。
(2)Global Model Description
注:Global Model Description 是离线(in the off-line phase)构建的
先看原文:
The model is represented by a set of point pair features with similar feature vectors being grouped together.
实现方法:
第一步:计算 model 表面所有 point pairs 的特征矢量 ,其中 distances 和 angles 分别以 和 的步长做采样;

points in the scene
points in the model
和
,法向量(normals)分别为
和
,
,则 PPF 定义为:
为两个矢量的夹角,且
是非对称的。PPF 示意图见 Figure2.(a)。
和
的步长做采样;
,如 Figure2.(b) 所示。
that are similar to a given scene feature
can then be searched in constant time by using
as a key to access the hash table.
,假设它在物体的表面上,若假设正确,则在 model 存在一个点
与
对应;
来描述,将这个 pair
定义为 model 相对于参考点
具有相似 fecture vector
;
将
移动到 Local Coordinates 的原点,并且转动 model,使其法向轴
与 Local Coordinates 的
轴重合;
对 scene 做相同操作;
绕
与
配准
,如 Figure 3 所示。
为 model 采样点
的个数,列(columns)数
为按采样步长
的旋转角
,对每一个点对,计算
;
和点对
;
对应的位置投票(+1);
,这样就可以分别计算
和
了。
和
,求得:
都是唯一的