
英伟达推出首个CPU,预估2023年投入使用;霸榜各大CV任务!微软推出分层视觉Swin Transformer

开发者社区技术周刊又和大家见面了,快来看看这周有哪些值得我们开发者关注的重要新闻吧。

SpaceX进行点火实验,准备4月22日载人航天发射
对标“ClubHouse”,Facebook拟推出社交音频产品
为大规模部署而生,京东云携手希捷打造新一代云服务器
Google 将搁置 Chrome 浏览器离线使用 PWA 的计划
英伟达推出首个CPU!预计2023年正式投入使用
Adobe联合创始人、PDF开发者查尔斯·格施克去世,曾获美国国家技术奖
国内首个智能网联政策先行区来了!企业可开展基于收费的商业运营服务
霸榜各大CV任务!Swin Transformer:层次化视觉Transformer
CVPR 2021 |基于几何稳定性分析的物体位姿估计方法


4 月 18 日根据外媒 Space 消息,硅谷钢铁侠马斯克创立SpaceX 公司于当地时间 4 月 17 日晚在美国弗洛里达州肯尼迪航天中心进行了猎鹰 9 号火箭的静态点火实验。据悉,这是 SpaceX 龙飞船的第二次发射任务,将搭载四名宇航员进行为期六月国际空间站生活。若发射计划一切顺利的话,SpaceX 龙飞船有望于 4 月 23 日美国东部时间上午 9:30 与轨道实验室进行对接。

据报道,Facebook 计划推出一系列新的“社交音频”产品,包括一款与 Clubhouse 音频社交相似的产品,以及一款与 Spotify 合作开发的播客发现和传播工具,一款纯语音版的视频会议产品Rooms。事实上,Facebook不是唯一一个看好这一理念的科技巨头,Twitter已经准备好推出与Clubhouse类似的产品Spaces,苹果也有可能在推出新的播客订阅产品。
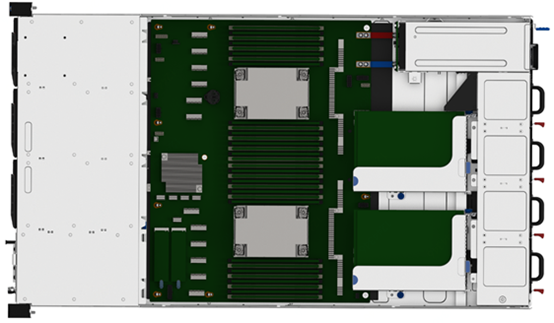
为了让硬盘与服务器实现系统性能最大化,京东云与希捷携手打造新一代云服务器,该服务器希捷C3实验室的专业仿真及测试环境评测,采用了创新服务器架构和散热设计,最大程度降低风扇声压振动对硬盘性能的影响,从而显著降低磁盘的读写失误,保障硬盘性能和稳定性。即便风扇在100%转速下,部署于服务器中的希捷银河(Exos)X18企业级硬盘的性能依然毫发无伤,仍然可以达到100%峰值,相比之下,传统服务器架构,4K随机写性能则会跌落到80%。

近日,Google宣布将推迟 Chrome 浏览器原定强制要求 Progressive Web Apps(PWA)具备离线功能支持的计划。使用 Progressive Web App 最大好处是通过“安装”,使得应用在功能上更接近系统中的本地应用。据了解,由于发现了问题以及 Web 开发者社区给出的反馈,Google决定暂停该计划。
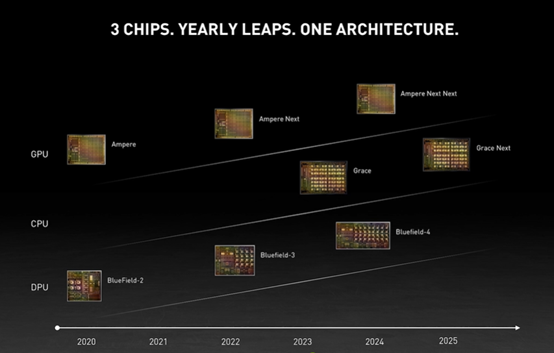
近日,NVIDIA GTC大会在线上举行,(NVIDIA)英伟达发布了三款基于Arm生态的处理器,分别是全球首款专为TB级加速计算机而设计的CPU NVIDIA Grace,全新的Bluefield-3 DPU以及业界首款1000TOPS算力的自动驾驶汽车SoC。去年9月,英伟达收购 ARM,就预示着NVIDIA必然进军 CPU 领域,将在云计算市场有所作为。
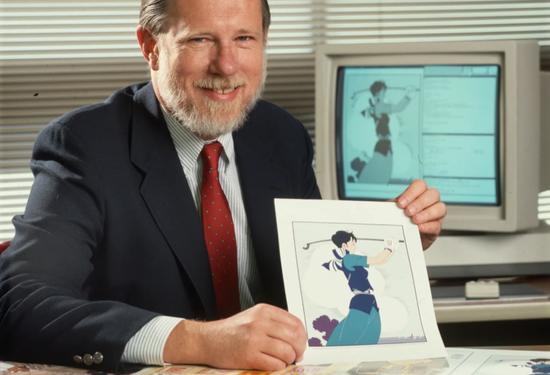
4月16日,开发了 PDF 文件格式、Photoshop 等经典软件的奥多比软件公司联合创始人查尔斯·格施克于 16 日去世,享年 81 岁。早年间,格施克在卡内基·梅隆大学获得博士学位,之后在工作中遇到了后来的合伙人约翰·沃诺克,两人离职成立了Adobe公司,先后推出了划时代的软件产品,包括无处不在的PDF、Acrobat、Photoshop 等经典软件。

近日,北京市智能网联汽车政策先行区发布会,北京市率先在国内设立首个智能网联汽车政策先行区,当天发布了《北京市智能网联汽车政策先行区总体实施方案》,并为百度、滴滴、小马智行等企业颁发政策先行区首批道路测试牌照。据介绍,获得首批道路测试牌照企业,将在北京复杂的交通环境中进行更大规模的道路测试,为公众提供自动驾驶出行服务,为自动驾驶技术迭代积累宝贵数据。所以,你在路上会看到更多无人驾驶的测试车辆!

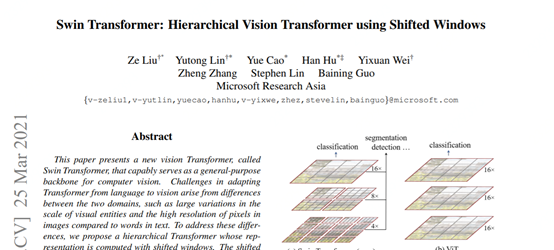
自 2017 年问世以来,基于“编码器-解码器”架构设计的 Transformer 模型凭借其优越的性能,已然成为机器翻译领域的主流模型。近期,Transformer在计算机视觉领域大展身手,涌现出了多个基于 Transformer 的新模型,如谷歌用于图像分类的 ViT 以及复旦、牛津、腾讯等机构的 SETR 等。
近日,微软亚研的研究者提出了一种通过移动窗口(shifted windows)计算的分层视觉 Transformer,称为Swin Transformer。相比之前的 ViT 模型,Swin Transformer 做出了以下两点改进:其一,引入 CNN 中常用的层次化构建方式构建分层 Transformer;其二,引入局部性(locality)思想,对无重合的窗口区域内进行自注意力计算。
*论文链接:https://arxiv.org/abs/2102.11127
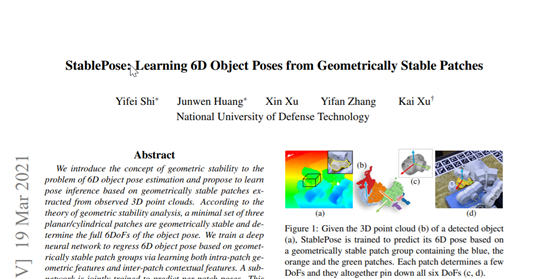
物体 6D 姿态估计是机器人抓取、虚拟现实等任务中的核心研究问题。近些年来,随着深度学习技术和图像卷积神经网络的快速发展,在提取物体的几何特征方面出现了许多需要改善的问题。国防科技大学的研究人员提出了利用物体表面几何稳定(Geometrically stable)的面片组合(Patch group)预测物体姿态的方法 StablePose来解决问题。
*论文链接:https://arxiv.org/abs/2102.09334
*以上信息来源于网络,由“京东科技开发者”公众号编辑整理,不代表京东科技立场*


