
Opencv实现瓶口缺陷检测(源码)
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
摘要
本文使用opencv实现Halcon中的一个瓶口缺陷检测实例(C++实现),Halcon中对应的例子为inspect_bottle_mouth.hdev,用于检测酒瓶瓶口是否出现破损等缺陷情形。
Halcon实例主要步骤包含五步,分别是:
使用阈值处理和形态学粗定位品口位置;
XLD轮廓拟合最近似的圆形区域作为瓶口的轮廓;
极坐标变换,转换到水平或垂直方向进行处理;
均值滤波图与原图做差分,根据阈值提取;
将绘制的缺陷部分通过反极坐标变换投影到原图上。
需要注意的是:在opencv中第一步和第二步这里直接用霍夫圆变换来替换(最重要的就是参数要设置合适)。
opencv实现步骤分解:
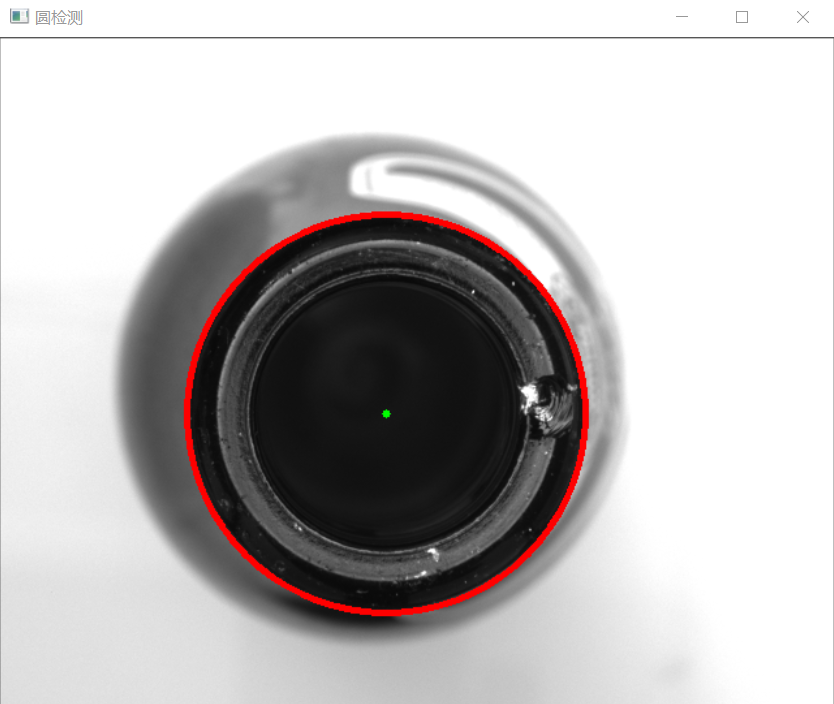
(一)读入图像,预处理,霍夫圆检测
Mat dst,src1;
Mat src = imread("D:/opencv练习图片/瓶口缺陷检测.png");
src.copyTo(src1);
imshow("原图", src);
//预处理,霍夫园检测
Mat gray;
cvtColor(src, gray, COLOR_RGB2GRAY);
medianBlur(gray, gray, 3);
vector<Vec3f>circles;
HoughCircles(gray, circles, HOUGH_GRADIENT, 1, 100, 200, 30, 150, 500);
我测试了一下,16张测试图,效果都不错,暂时采用它。但是对于霍夫圆检测,设置参数必须精确,才能有效果。
HoughCircles函数API
vector<Vec3f>circles;
HoughCircles(gray, circles, HOUGH_GRADIENT, 1, 100, 200, 30, 150, 500);
//第一个参数是输出被检测图片
//第二个参数表示存储数组,其中存储被检测的圆的圆心的坐标和圆的半径。
//第三个参数是检测圆的方法(霍夫梯度法)
//第四个参数可以设置为1就行--默认参数
//第五个参数是圆心与圆心之间的距离,这是一个经验值。这个大了,那么多个圆就是被认为一个圆。
//第六个参数 就设为默认值就OK
//第七个参数这个根据你的图像中的圆 大小设置,如果圆越小,则设置越小
//第八个和第九个参数 是你检测圆 最小半径和最大半径是多少 这个是经验值
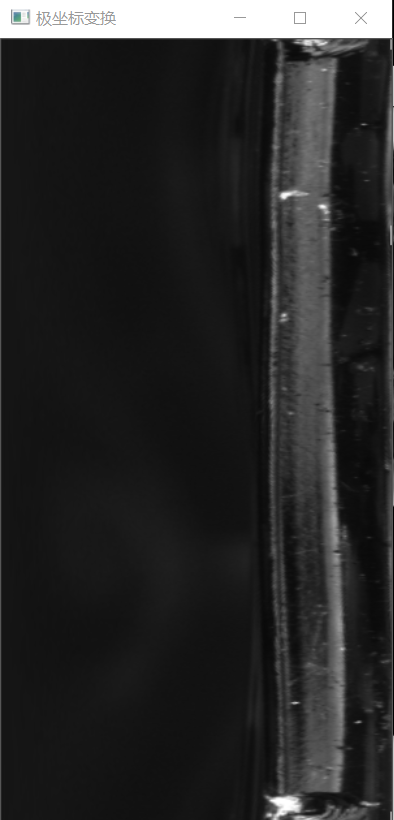
(二)极坐标变换(重点就是要准确找到圆心作为极坐标变换的中心)
int X = 0;//圆心坐标的X
int Y = 0;//圆心坐标的Y
int R = 0;//半径
Mat ROI;
for (int i = 0; i < circles.size(); i++)
{
X = cvRound(circles[i][0]);
Y = cvRound(circles[i][1]);
Point center(X,Y);//圆心坐标
R = cvRound(circles[i][2]);
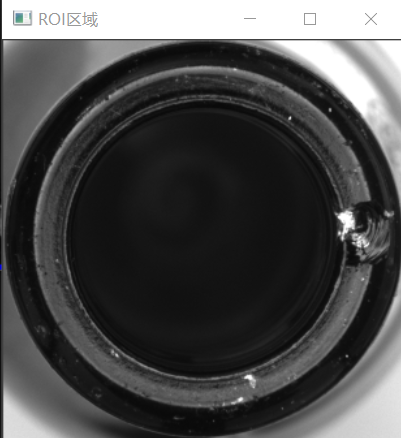
ROI = src(Rect(X - R, Y - R, 2 * R, 2 * R));//提取ROI区域
Point trans_center = Point(R, R);//ROI区域内的中心坐标
warpPolar(ROI, dst, Size(300, 600), trans_center, R, INTER_LINEAR | WARP_POLAR_LINEAR);
}
imshow("ROI区域", ROI);
imshow("极坐标变换", dst);
(三)均值滤波做差分,二值化
//均值滤波做差分
Mat dst_blur,diff,binary,dst_gray;
cvtColor(dst, dst_gray, COLOR_RGB2GRAY);
blur(dst_gray, dst_blur, Size(3, 501), Point(-1, -1));
absdiff(dst_gray, dst_blur, diff);
imshow("差分", diff);
threshold(diff, binary, 70, 255, THRESH_BINARY);
medianBlur(binary, binary, 3);
imshow("二值化", binary);

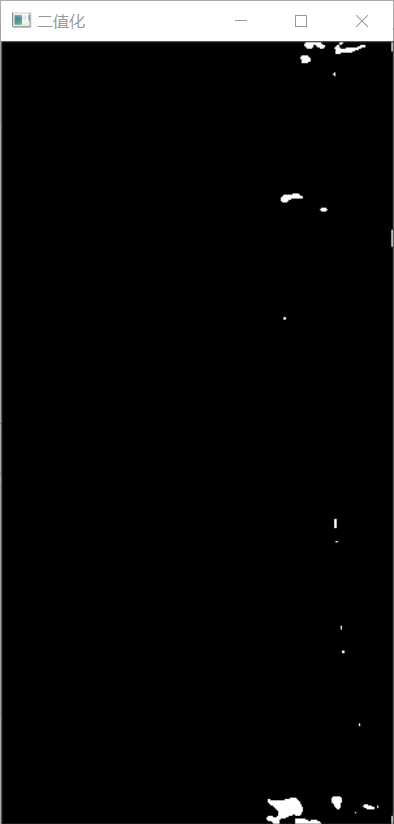
注意这里的均值滤波核大小,一般我们都是设置(3,3)或(5,5)等,这里物体垂直方向较长,参考Halcon例子中设置为(3, 501)。
可以看到,通过均值滤波差分后图像的缺陷已经可以很明显的看到了。
(四)轮廓提取,筛选缺陷轮廓
vector<vector<Point>>contours;
findContours(binary, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point());
for (int i = 0; i < contours.size(); i++)
{
Rect rect = boundingRect(contours[i]);
float width = rect.width;
if (width>10)
{
drawContours(dst, contours,i, Scalar(0, 0, 255), 2);
}
}
imshow("缺陷", dst);
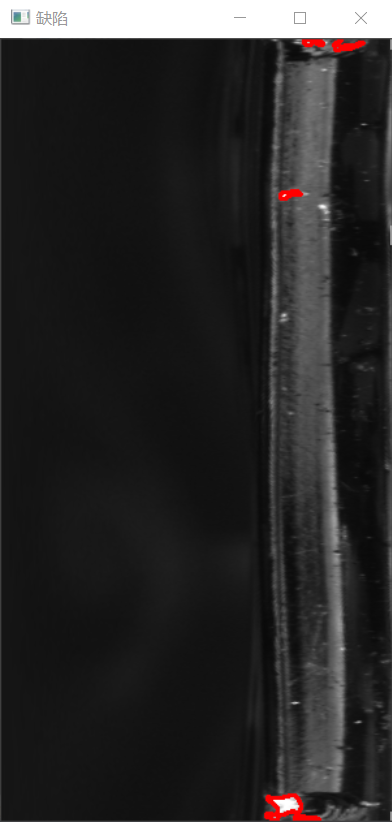
这里筛选缺陷的标准是:轮廓宽度大于10的都认为是缺陷(可以添加更精确的标准)
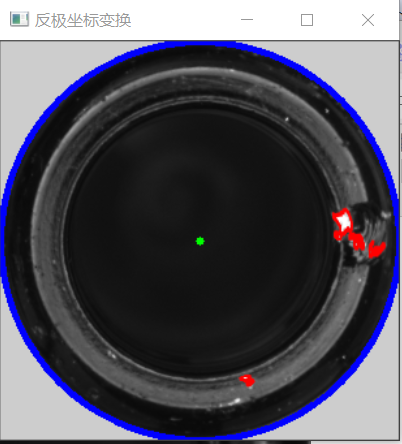
(五)反极坐标变换,结果投影到原图
Mat polarImg_Inv;
warpPolar(dst, polarImg_Inv, ROI.size(), Point(R,R), R, INTER_LINEAR | WARP_POLAR_LINEAR| WARP_INVERSE_MAP);
circle(polarImg_Inv, Point(R, R), 3, Scalar(0, 255, 0), -1, 8, 0);
circle(polarImg_Inv, Point(R, R), R, Scalar(255, 0, 0), 3, 8, 0);
imshow("反极坐标变换", polarImg_Inv);
来源:https://www.cnblogs.com/xyf327/p/14848402.html
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!
评论