
光测力学-栅线投影/面结构光技术
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

作者:琉璃犀 https://zhuanlan.zhihu.com/p/146841284 本文仅做学术分享,如有侵权,请联系删除。
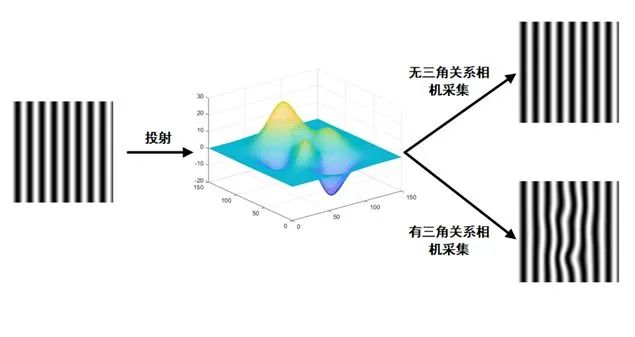
本文主要介绍了栅线投影方法的基本原理-三角测量与线性对应关系,以及栅线投影系统标定的细节。下一篇文章我们将介绍傅里叶与相移两种相位求解方法。
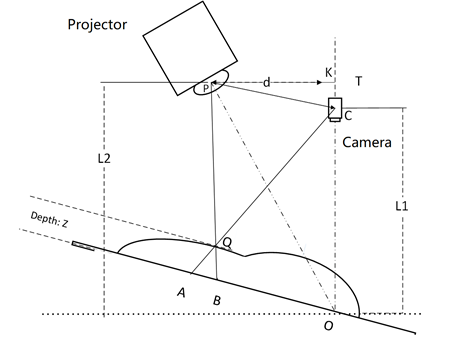

 为
为  点至
点至  的距离,在后文中,形如
的距离,在后文中,形如  的表达式均代表距离。考虑物体上的任意一点
的表达式均代表距离。考虑物体上的任意一点  ,其中点
,其中点  与点
与点  分别为相机和投影仪通过点 在虚平面上的投影。由于
分别为相机和投影仪通过点 在虚平面上的投影。由于  相似于
相似于  ,故有以下比例关系:
,故有以下比例关系:
 的表达式,如下:
的表达式,如下:
 远小于
远小于  ,故可以忽略其在分母中的存在,将上述公式简化如下:
,故可以忽略其在分母中的存在,将上述公式简化如下:
 信息,综上所述 与
信息,综上所述 与  也呈线性关系,即:
也呈线性关系,即:
 为B点与A点之间的相位差距,
为B点与A点之间的相位差距,  为Q点与A点之间的相位差距。注意到此理想情况下,以虚平面为基准面,当
为Q点与A点之间的相位差距。注意到此理想情况下,以虚平面为基准面,当  时,
时,  ,故其为常数项为0的线性关系。而在具体实验系统标定时,所设置的标定零平面与虚平面往往不重合,其表达式之间存有一个线性转化关系,故实际的 与
,故其为常数项为0的线性关系。而在具体实验系统标定时,所设置的标定零平面与虚平面往往不重合,其表达式之间存有一个线性转化关系,故实际的 与  的线性关系常数项不为0,即可进一步表达为:
的线性关系常数项不为0,即可进一步表达为:
 为标定零平面上对应点的参考相位,k与b为系统的测量标定系数。上式表明,对于物体表面任意一点的高度 ,与相机采集到的投影图案所对应的相位值是呈近似线性关系的。故在测量中首先对测量系统的k与b进行标定,进而只需要求解出物体表面每一点的相位值即可解出物体表面的三维形貌。
为标定零平面上对应点的参考相位,k与b为系统的测量标定系数。上式表明,对于物体表面任意一点的高度 ,与相机采集到的投影图案所对应的相位值是呈近似线性关系的。故在测量中首先对测量系统的k与b进行标定,进而只需要求解出物体表面每一点的相位值即可解出物体表面的三维形貌。
当前对于测量系统标定的方法主要有两类。第一类是将相机、投影仪的内参与外参全都标定出来,即分别明确投影仪和相机在空间内的3个空间坐标,3个光轴方向坐标和一个传感器角度坐标,通过标定出这些参数,则能够直接将栅线相位和高度之间的关系计算出来。第二类是平面标定,即通过一个平面标定板,对空间不同位置进行多次标定,从而建立相位差值和高度之间的关系。两种方法相比,虽然平面标定需要一个高精度的平移台做硬件支撑,但其操作简单,计算精度高,是比较常用的一种方法。投影仪相机联合标定将在以后的文章中叙述。
同坐标相位标定算法是一种基于相机同一个像素点的标定方法。这种方法采用一个标准平面与一个平移台。其中平移台的精度越高越好,因为系统的测量精度取决于平移台的位移精度。其原理图如下所示。
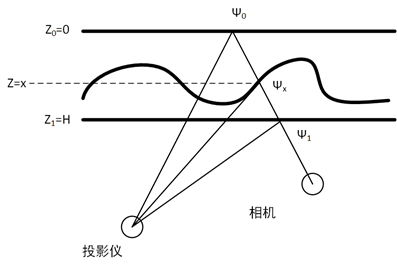
 和
和  位置时采集的相位为
位置时采集的相位为  和
和  。注意这里的相位是投影仪的总相位,即通过投影仪投射一根标准亮条纹确定真实相位所在的周期,再以该周期为起始区域向四周解包裹得到所用的相位。对于被测量实际物体上的一点,由于相似关系有:
。注意这里的相位是投影仪的总相位,即通过投影仪投射一根标准亮条纹确定真实相位所在的周期,再以该周期为起始区域向四周解包裹得到所用的相位。对于被测量实际物体上的一点,由于相似关系有:
 ,可求算处其相对于标定零位面的高度为:
,可求算处其相对于标定零位面的高度为:
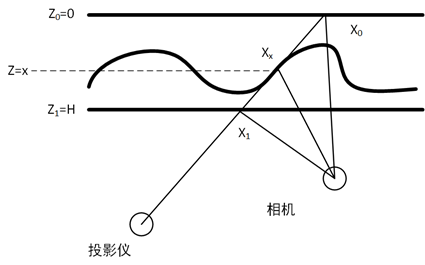
 而言,其对应在两个标定平面上的位置分别为
而言,其对应在两个标定平面上的位置分别为  与
与  。同样利用相似性比例关系有:
。同样利用相似性比例关系有: ,记录其像素位置,再根据标定找出相同相位对应的位置 与 ,即可求算处其相对于标定零位面的高度为:
,记录其像素位置,再根据标定找出相同相位对应的位置 与 ,即可求算处其相对于标定零位面的高度为: 与其所在的位置
与其所在的位置  呈一定线性关系。为了提高标定精度,一般同样增加多个标定平面,利用最小二乘技术直接去将线性参数进行拟合。
呈一定线性关系。为了提高标定精度,一般同样增加多个标定平面,利用最小二乘技术直接去将线性参数进行拟合。好消息,小白学视觉团队的知识星球开通啦,为了感谢大家的支持与厚爱,团队决定将价值149元的知识星球现时免费加入。各位小伙伴们要抓住机会哦!
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论