
结构光发展简史
来源:https://zhuanlan.zhihu.com/p/29971801
作者:许翔翔@知乎
■ 背景知识
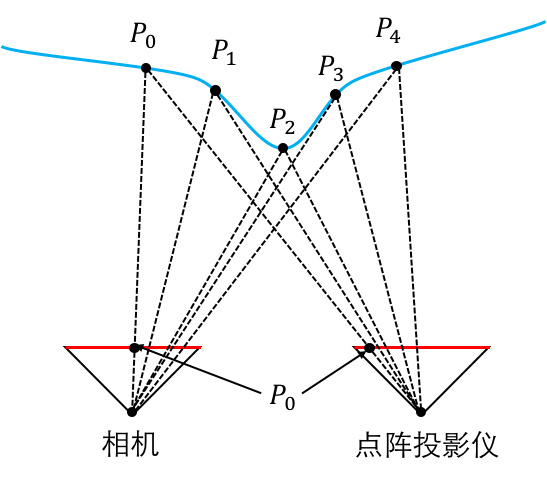
针孔相机模型:射线方程
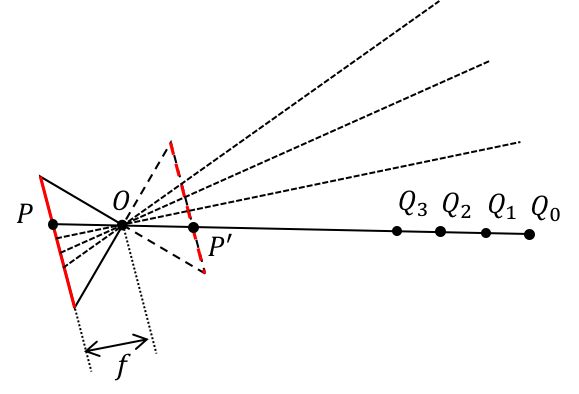
 点,传感器面为红色实线, 点到传感器面距离
点,传感器面为红色实线, 点到传感器面距离  。那么我们可以这样描述成像的过程:三维空间中的
。那么我们可以这样描述成像的过程:三维空间中的  点经过光心 点在传感器面上成像为
点经过光心 点在传感器面上成像为  点,且 、 、 三点在一条直线上。针孔相机模型是一个三维空间(
点,且 、 、 三点在一条直线上。针孔相机模型是一个三维空间(  点所在空间)到二维面( 点所在面)的变换,
点所在空间)到二维面( 点所在面)的变换,  线上的任意一点(如
线上的任意一点(如  、
、 、
、 )所成的像都是 点,因此如果只知道 点,我们是无法反推出具体哪一个 点点亮了 点,我们只能说点亮 点的点一定在射线
)所成的像都是 点,因此如果只知道 点,我们是无法反推出具体哪一个 点点亮了 点,我们只能说点亮 点的点一定在射线  上。所以针孔相机模型本质上是射线方程,也就是说知道了CCD上的点,就可以得到一条射线。
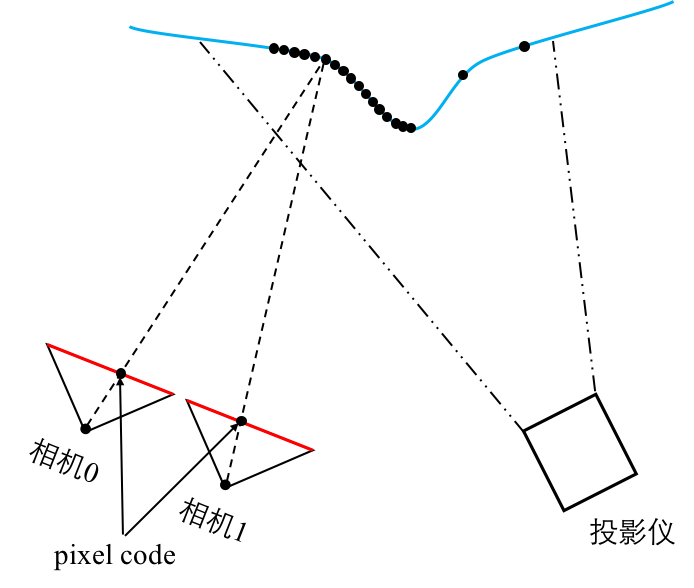
上。所以针孔相机模型本质上是射线方程,也就是说知道了CCD上的点,就可以得到一条射线。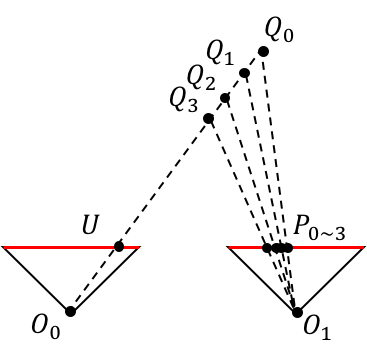 点点亮了相机0上的
点点亮了相机0上的  点,我们引入了另一个相机,通过相机1,我们可以得到 点在相机1中的像点 ,联立
点,我们引入了另一个相机,通过相机1,我们可以得到 点在相机1中的像点 ,联立  和
和  我们就可以唯一的得到空间中 点,上图表达了这个关系。
我们就可以唯一的得到空间中 点,上图表达了这个关系。■ 被动测距

■ 主动结构光
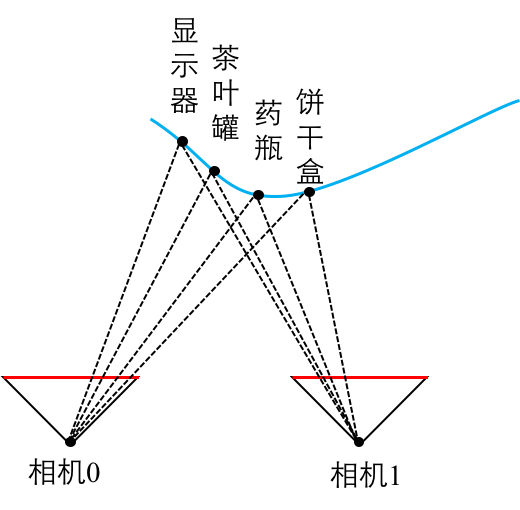
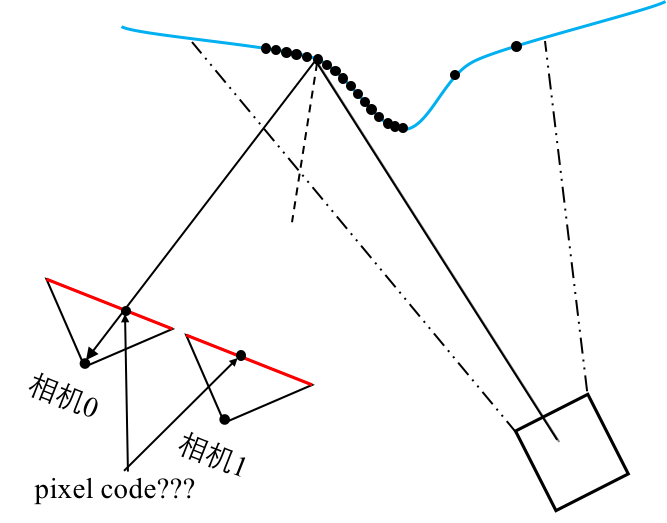
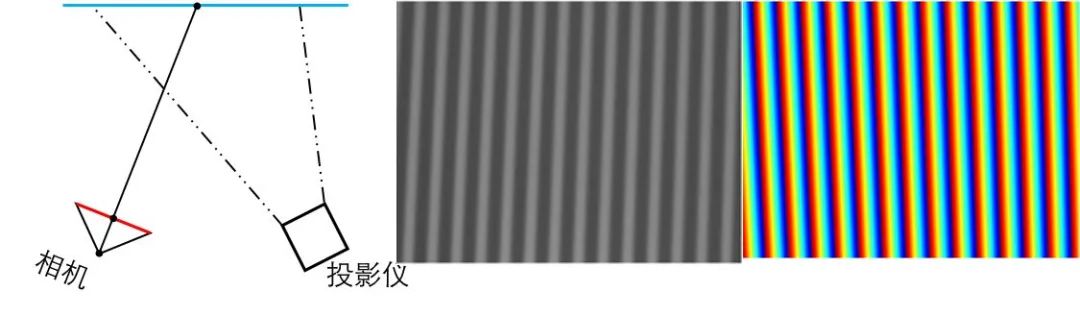
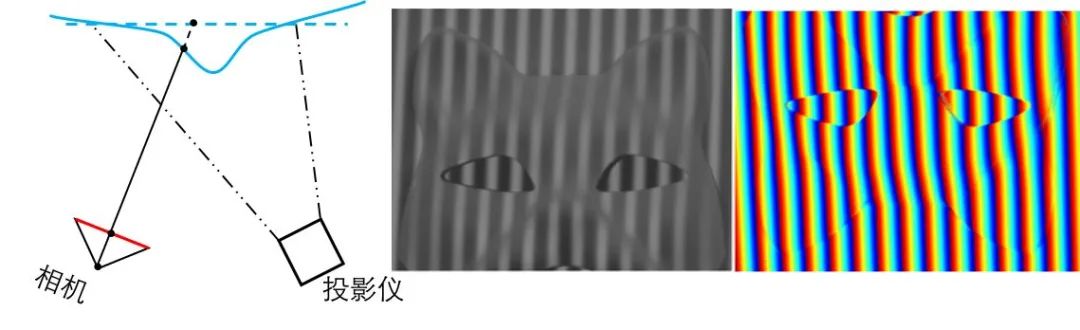
 点的投影点,也可以在相机CCD面上找到被 点亮的成像点。上面的草图中,一共有五个投影点,而相机拍到的五个投影点,会因为面形的存在改变相邻两点之间的距离却不会因为面形的存在导致五个投影点相对顺序的改变,因此我们说相机是通过拓扑网格的标号来确定CCD面上点和投影仪投影面上点的一一对应关系。
点的投影点,也可以在相机CCD面上找到被 点亮的成像点。上面的草图中,一共有五个投影点,而相机拍到的五个投影点,会因为面形的存在改变相邻两点之间的距离却不会因为面形的存在导致五个投影点相对顺序的改变,因此我们说相机是通过拓扑网格的标号来确定CCD面上点和投影仪投影面上点的一一对应关系。
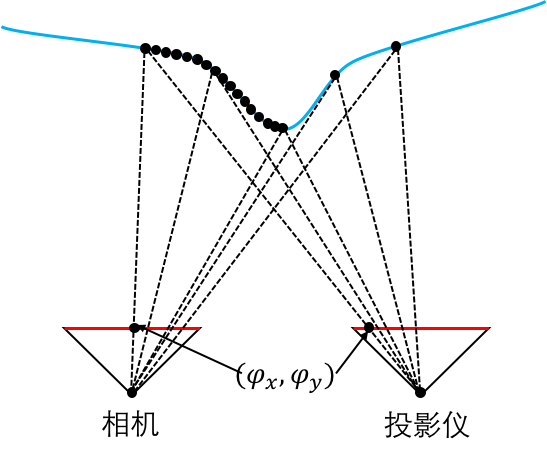
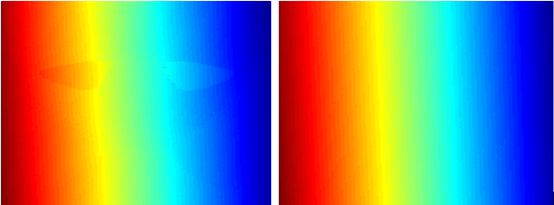
 作为传递不变量。之所以用相位分布作为传递不变量,是因为相位分布是由面形的高度分布直接决定的。
作为传递不变量。之所以用相位分布作为传递不变量,是因为相位分布是由面形的高度分布直接决定的。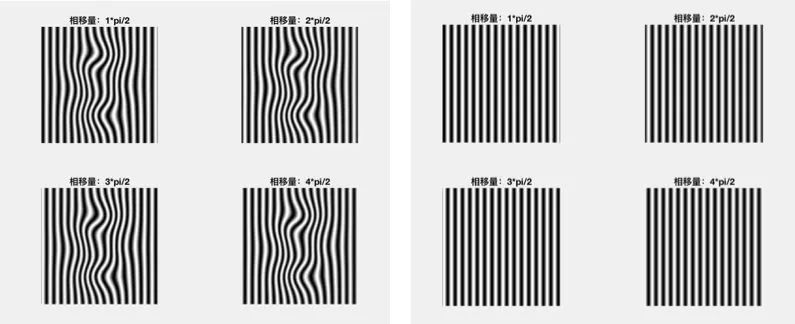
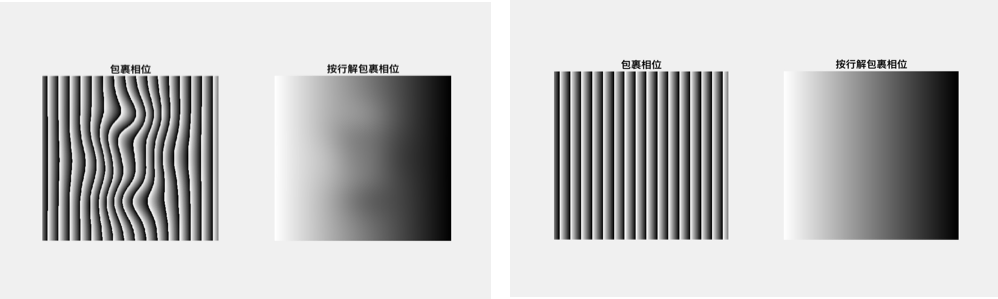
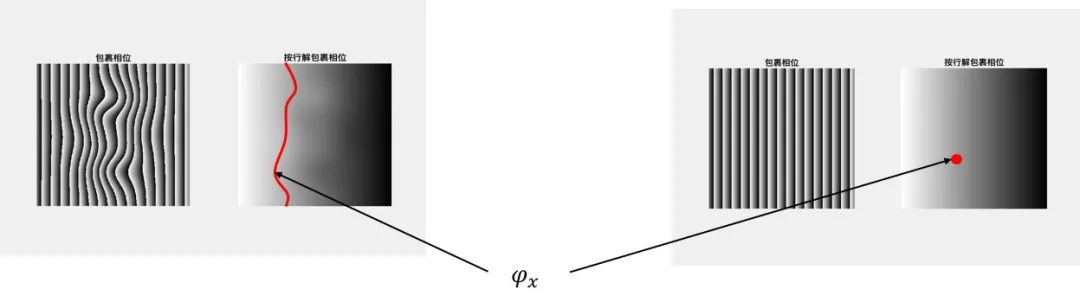
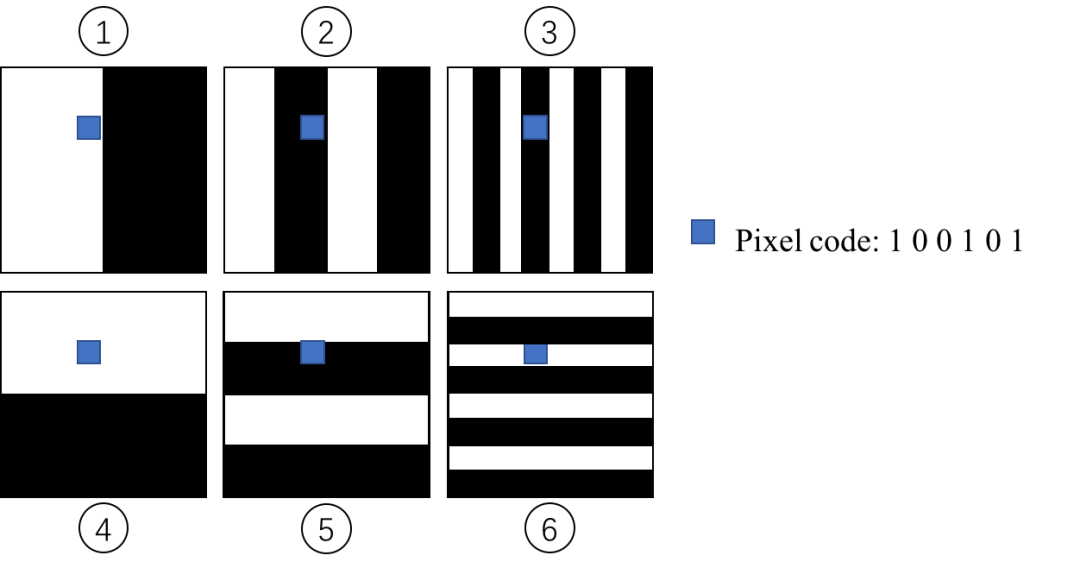
 CCD面像素标号」的对应关系,实现了像素级点对点匹配。
CCD面像素标号」的对应关系,实现了像素级点对点匹配。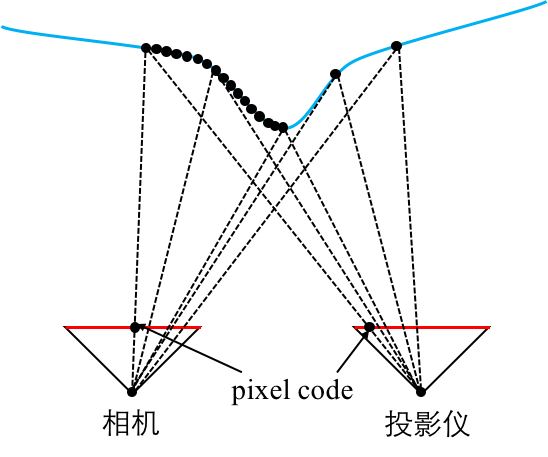


 是在
是在  处待测面与参考面的高度差,
处待测面与参考面的高度差,  是对应的待测面相位分布和参考面相位分布的差,
是对应的待测面相位分布和参考面相位分布的差,  ,
,  和
和  是标定系数。 、 、 需要采用别的手段进行标定。由于标定好「相位——高度」的映射,因此PMP不需要在另一个方向测量相位分布。为了解决PMP中方程欠定的问题,需要引入参考面和其他的标定手段,肯定有读者会问这相对于之前的结构光好在哪里呢?其实方法没有好坏之分只有适合用在哪里的区别。虽然PMP增加了标定和设备的复杂性,但是好在这些工作只要做一次就可以,非常适用于有基准面的测量,比如电路板的三维测量等等。
是标定系数。 、 、 需要采用别的手段进行标定。由于标定好「相位——高度」的映射,因此PMP不需要在另一个方向测量相位分布。为了解决PMP中方程欠定的问题,需要引入参考面和其他的标定手段,肯定有读者会问这相对于之前的结构光好在哪里呢?其实方法没有好坏之分只有适合用在哪里的区别。虽然PMP增加了标定和设备的复杂性,但是好在这些工作只要做一次就可以,非常适用于有基准面的测量,比如电路板的三维测量等等。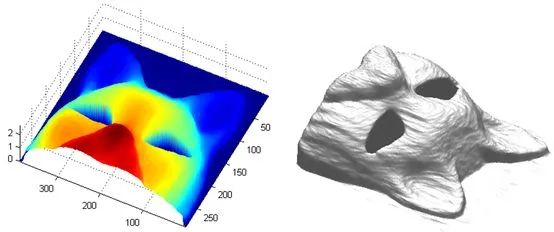
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的,文章版权归原作者所有。如有不妥,请联系删除。

评论