摄像机数学模型采用小孔成像的原理,在笛卡儿空间中建立景物点与成像点之间的映射关系。令点P=(Xw,Yw,Zw)为像素p(u,v)投射在世界坐标系中的点,(u,v,1)是点p在像素坐标系中的齐次坐标;(Xw,Yw,Zw,1)是点 P 在世界坐标系中的 齐次坐标。那么两个坐标的关系为RGB-D数据来自立体相机中RGB相机和 Depth相机,由于相机空间视角不同,两组原始数据中RGB数值与深度数值不匹配。在标定立体相机的外参数后,建立RGB像素值与 Depth数值两者之间的一一对应关系。采用图像阈值的点云分割基本思路:根据图像像素和点云的对应关系进行图像分割,获得目标区域点云。
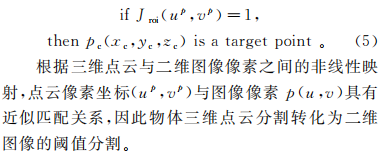
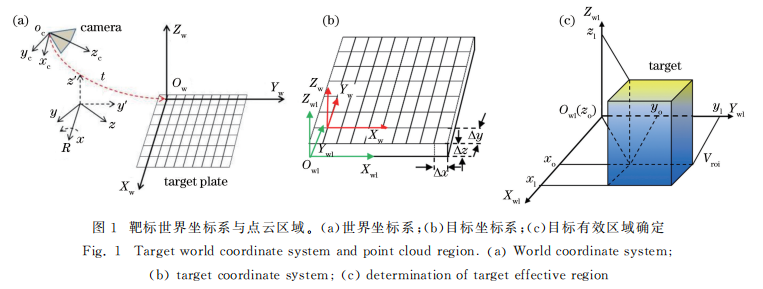
立体相机中依据 RGB 相机和Depth相机的外参数,可以把Depth相机生成的点云转换到相机坐标系下。参考棋盘格建立世界坐标系。利用靶标世界坐标系可实现一定程度的点云分割,其基本思路是:由于场景三维点云的空间尺度与世界坐标系的空间尺度具有一致性,通过建立世界坐标系并确定待测物体在世界坐标系中的空间区域,可分割映射到世界坐标系里的点云。如图1(a)所示,pc(xc,yc,zc)为相机坐标系中的点云,Pw (Xw,Yw,Zw)是世界坐标系中的点云,由(1)式可得
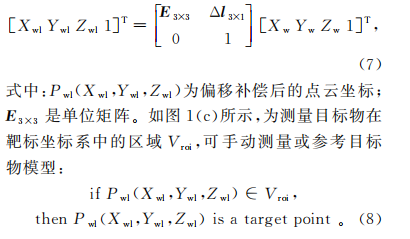
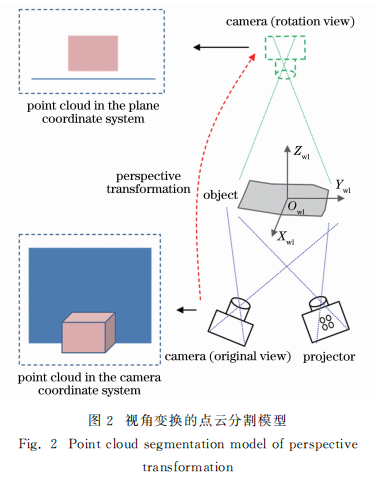
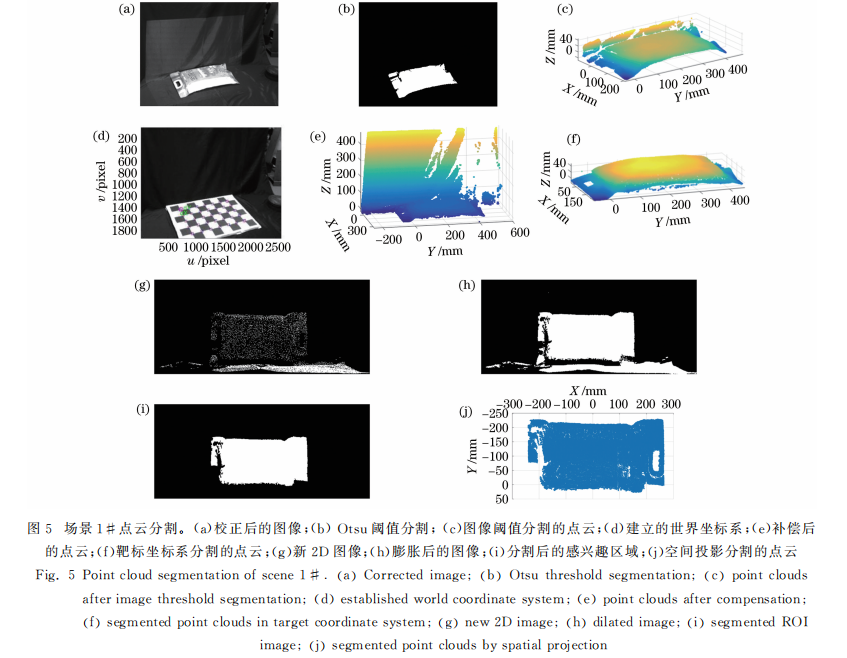
如图1(b)所示,由于靶标板(标定板)所指定的 坐标系相对于棋盘格角点所建立的世界坐标系有一 定的偏移,这里采用补偿的方式进行坐标系校正。设靶标的厚度为 Δz,世界坐标系原点在待测区域的X和Y轴的偏移分别为Δx 和Δy,补偿偏移量Δl3×1=[Δx Δy Δz]T,则(6)式可进一步表示为参考前述的图像阈值、靶标世界坐标系与点云区域的关系,为了突出目标区域以实现点云分割,可将点云的观测视角旋转至俯视角度(鸟瞰视角),如图2所示,这样可减少背景点云信息,使目标点云呈现更多信息,采用相机模型将点云投影至相机的图像像素。在得到旋转投影后场景的二维图像后,采用图像阈值分割的方法可快速地得到目标阈值范围,还原后得到场景分割的目标点云。参考(6)式得到世界坐标系中的点云 Pwl(Xwl, Ywl,Zwl),将其变换到场景点云的俯视角时,有:
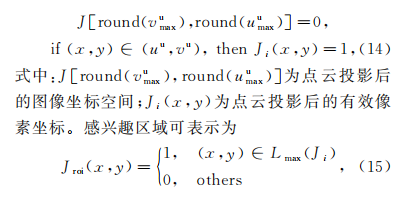
根据单目摄像机模型,可以得到点云对应的二值图像坐标为:

 End
End  下载APP
下载APP