
Repulsion Loss 遮挡场景下的目标检测
GiantPandaCV导语
遮挡是目标检测中较为棘手的问题,通过对遮挡问题进行建模,引入吸引和排斥的概念,提出了Repulsion Loss,从Loss和NMS上入手,比较好的缓解了遮挡带来的问题。文中配有源码解析。
介绍
本文是旷视研究院CVPR2018上的一篇工作,在检测行人任务中,由于行人之间互相遮挡,导致传统的检测器容易受遮挡的干扰,给出错误的预测框。
研究人员先是从数据集上进行分析,定量描述了遮挡对行人检测带来的影响。后面受吸引,排斥的启发,提出了Repulsion Loss来尽可能让预测框贴近真实框的同时,又能与同类排斥,进而避免误检。
问题引入
常见的遮挡问题可以再被细分为主要两类
类间遮挡,即目标被其他类遮挡住。举个例子,一个行人遛狗,人体下半部分就可能被狗狗遮住
类内遮挡,目标物体被同类遮挡住,在我们问题里面也就是行人遮挡。
我们思考一下行人遮挡会对检测器造成什么影响。假设我们目标行人是T,旁边被另外一个行人B所遮挡。那么B的真实框会导致我们对T的预测框P,往B去移动(shift),造成类似下图的情况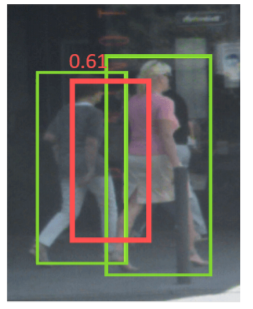 另外我们再考虑下目标检测常用的后处理NMS,非极大值抑制。NMS操作是为了抑制去除掉多余的框。但是在行人检测中,NMS操作会带来更糟糕的检测结果。还是刚刚的例子,我对T有一个预测框P,但因为距离B靠的太近,我可能会被B的预测框给抑制,导致行人检测中出现漏检。这也从另外一个侧面反映出行人检测对NMS阈值的敏感性,阈值太低了会带来漏检,阈值太高了会带来假正例(即标出错误的目标)
另外我们再考虑下目标检测常用的后处理NMS,非极大值抑制。NMS操作是为了抑制去除掉多余的框。但是在行人检测中,NMS操作会带来更糟糕的检测结果。还是刚刚的例子,我对T有一个预测框P,但因为距离B靠的太近,我可能会被B的预测框给抑制,导致行人检测中出现漏检。这也从另外一个侧面反映出行人检测对NMS阈值的敏感性,阈值太低了会带来漏检,阈值太高了会带来假正例(即标出错误的目标)
因此如何稳定的检测出群体中个体行人是行人检测器的关键。
现有的方法仅仅要求预测框尽可能靠近目标框,而没有考虑周围附近的物体。受磁铁同性相斥,异性相吸的原理,我们提出了一种RepLoss新的损失函数
该损失函数在要求预测框P靠近目标框T(吸引)的同时,也要求预测框P远离其他不属于目标T的真实框(排斥)该损失函数很好的提升了行人检测模型的性能,并且降低了NMS对阈值的敏感性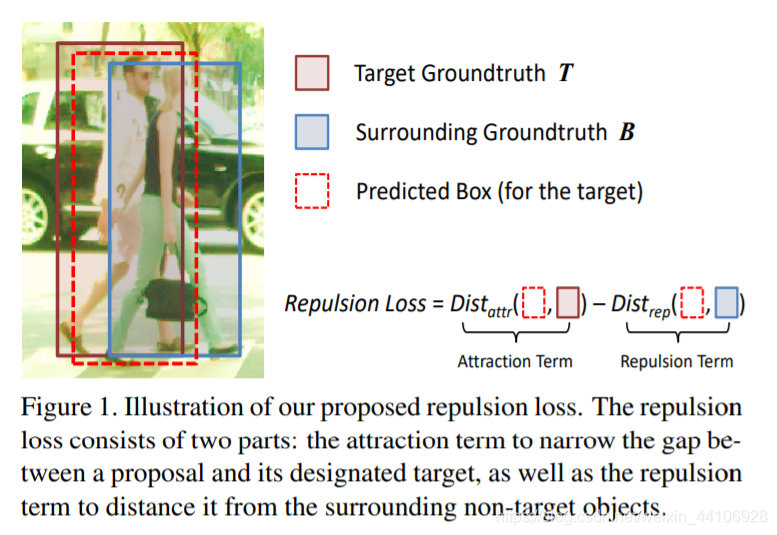
人群遮挡的影响
数据集
我们采用了CityPersons数据集,该数据集有共约35000个行人。我们的实验都基于这个数据集进行,在评价当中,我们采用log miss rate的MR−2指标来进行衡量(也就是每张图片的漏检率上取平均值,再进行log计算,该值越低越好)
检测器
我们的基线检测器沿用了Faster RCNN,将骨干网络换成resnet。由于行人检测算是小目标检测任务,因此我们给resnet增加了空洞卷积,并将下采样改为8倍(原始224->7下采样是32倍)
简单改进后的目标检测器的MR指标由15.4下降到14.6,稍微提升了点。
小目标难检测原因(补充)
传统的分类网络为了减少计算量,都使用到了下采样,而下采样过多,会导致小目标的信息在最后的特征图上只有几个像素(甚至更少),信息损失较多 下采样扩张的感受野比较利于大目标检测,而对于小目标,感受野可能会大于小目标本身,导致效果较差
对失败案例的分析
我们在CityPerson数据集中,由于该数据集是从分割数据集得来的,因此我们有每个行人的可见区域,即BBox_visible
为了更好分析,我们定义了一个遮挡率,如下公式
由公式可知,当行人可见区域越小,遮挡率occ越大
我们设定occ >= 0.1即为一个遮挡的案例
而occ >=0.1 并且与其他行人的IoU >=0.1,我们定义为人群遮挡案例
基于这两类设定,我们又在原数据集上划分出两个子集,分别是reasonable-occ,reasonable-crowd
很显然,reasonable-crowd也是resonable-occ的子集
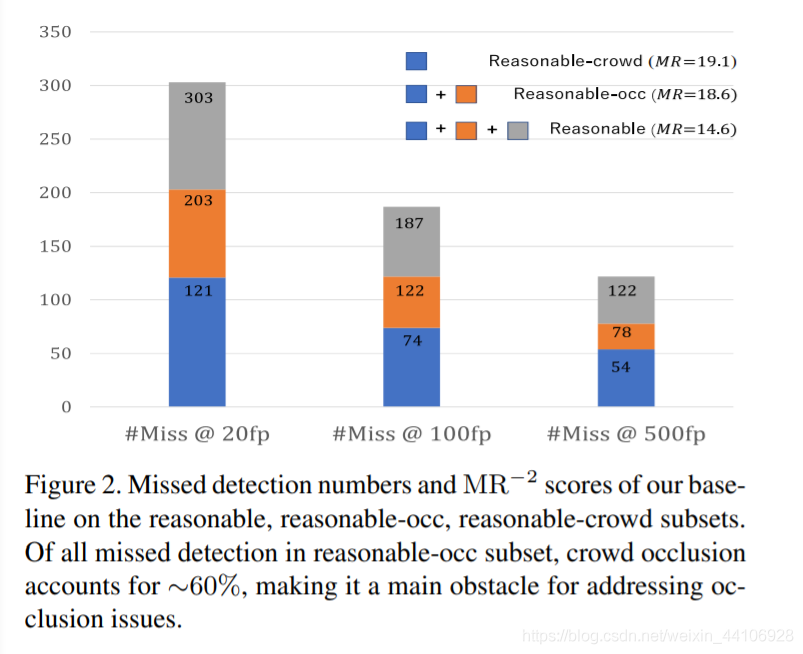 蓝色,橙色,灰色分别代表Reasonable-crowd子集,Reasonable-occ子集,Reasonable集合。可以看到crowd子集在occ子集中,占据了接近60%。这也从侧面说明了人群遮挡是遮挡中一个主要问题。
蓝色,橙色,灰色分别代表Reasonable-crowd子集,Reasonable-occ子集,Reasonable集合。可以看到crowd子集在occ子集中,占据了接近60%。这也从侧面说明了人群遮挡是遮挡中一个主要问题。
假正例分析
我们同时也分析了有多少假正例是由人群遮挡造成的
我们具体分为了三类,background,localization,crowd
background是预测框与真实框的IoU<0.1 localization是预测框仅与一个真实框的IoU>=0.1 Crowd是预测框与多于两个真实框的IoU>=0.1
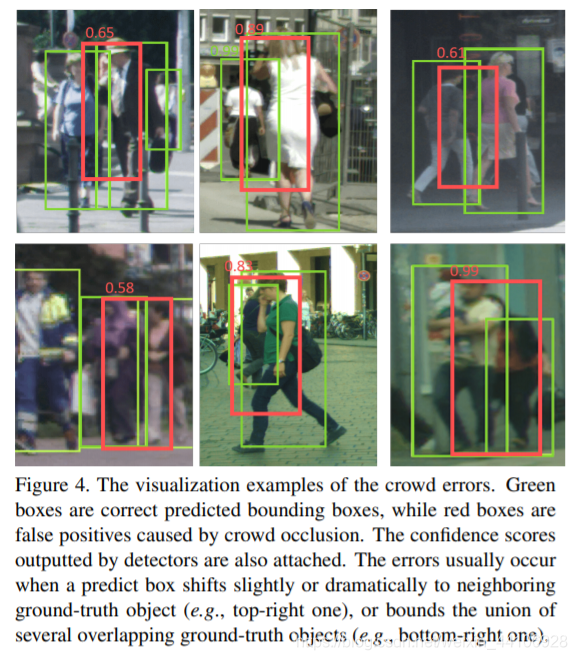 图中红框就是上述的crowd error,大约有20%的假正例都是由人群导致的
图中红框就是上述的crowd error,大约有20%的假正例都是由人群导致的
因为相邻的两个真实框,预测框或多或少产生偏移,导致预测错误
Repulsion Loss
前面分析了这么多错误,现在才是重头戏
Repulsion Loss主要由三部分构成
Lattr是为了预测框更接近真实框(即吸引)
Lrep则是为了让预测框远离周围的真实框(即排斥)
参数α和β用于平衡两者的权重
我们设
P(lP , tP , wP , hP )为候选框
G(lG, tG, wG, hG)为真实框
P+为正候选框集合,正候选框的意思是,至少与其中一个真实框的IoU大于某个阈值,这里是0.5
g = {G} 是真实框集合
Attraction term
这一项loss在其他算法也广泛使用,为了方便比较,我们沿用smoothL1 Loss
Smooth L1 Loss公式如下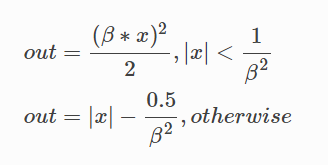 这里我们的平滑系数取2
这里我们的平滑系数取2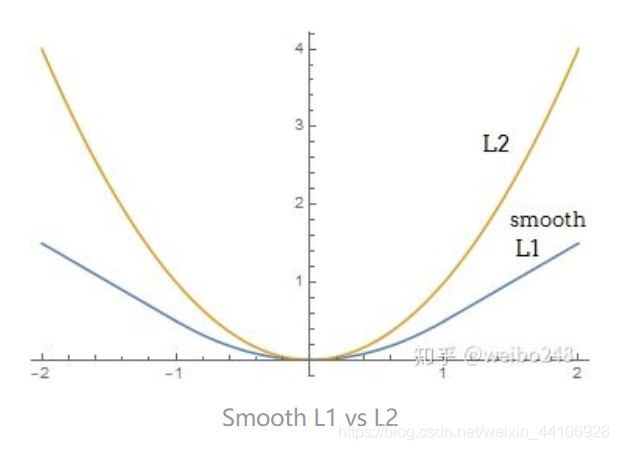
Repulsion Term (RepGT)
RepGT loss设计是为了远离非目标的真实框
对于一个候选框P,其排斥对象被定义为,除去本身要回归目标的真实框外,与其IoU最大的真实框 受IoU loss启发,我们定义了一个IoG
受IoU loss启发,我们定义了一个IoG
损失定义如下 这里没有采用smooth l1 loss而是smooth ln loss,其公式如下
这里没有采用smooth l1 loss而是smooth ln loss,其公式如下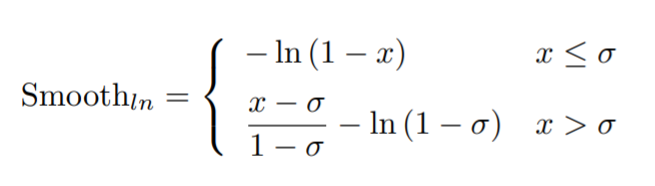
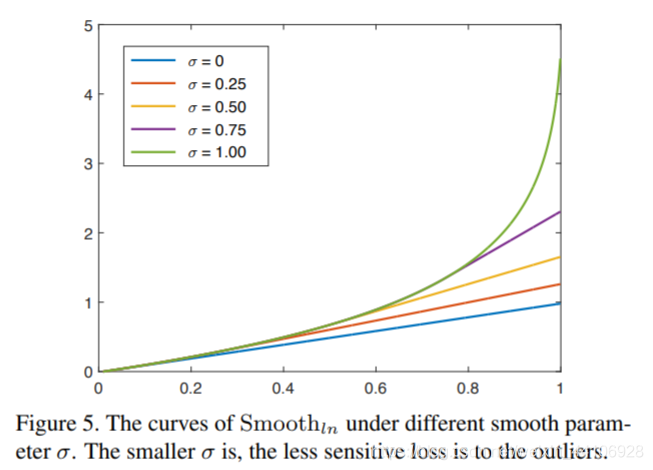 不同平滑系数,最后陡峭程度不一样。当一个候选框P与非目标的真实框重叠越多,其惩罚也越大。
不同平滑系数,最后陡峭程度不一样。当一个候选框P与非目标的真实框重叠越多,其惩罚也越大。
Repulsion Term (RepBox)
这项损失是针对人群检测中,NMS处理对阈值敏感的问题
我们先将P+集合划分成互斥的g个子集(因为一共有g个目标物体)
然后从两个不同子集随机采样,分别得到两个互斥集合的预测框,即
我们希望这两个互斥集合出来的回归框,交叉的范围尽可能小,于是有了RepBox loss,公式如下 其中分母的I是identity函数,即
其中分母的I是identity函数,即
这里限制大于0,为了避免分式除0,我们这里加了个极小值
上面依旧采用Smooth ln函数来计算。
引申讨论
距离函数选择
在惩罚项中,我们分别选择了IoG和IoU来进行度量。其原因是IoG和IoU把范围限定在了(0, 1),与此同时 SmoothL1是无界的。如果SmoothL1用在RepGT中,它会让预测框与非目标的gt框离的越远越好,而我们的初衷只是想减少交叉部分,相比之下,IoG更符合我们的思想
另外在RepGT中使用IoG而不使用IoU的原因是,IoG的分母下,真实框大小area(G)是固定的,因此其优化目标是去减少与目标框重叠,即area(B∩G)。而在IoU下,回归器也许会尽可能让预测框更大(即分母)来最小化loss
实验部分
这里只简单介绍一下
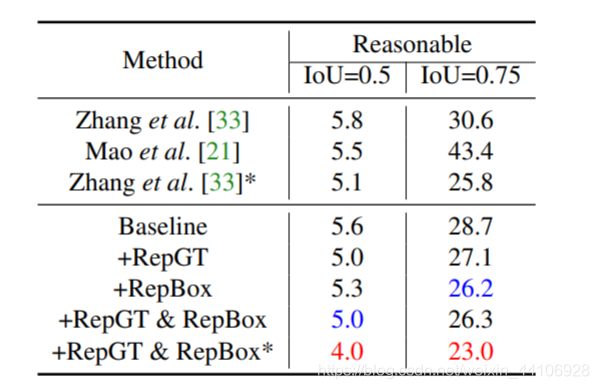
我们在CityPerson和Caltech-USA分别训练了80k和160k个iter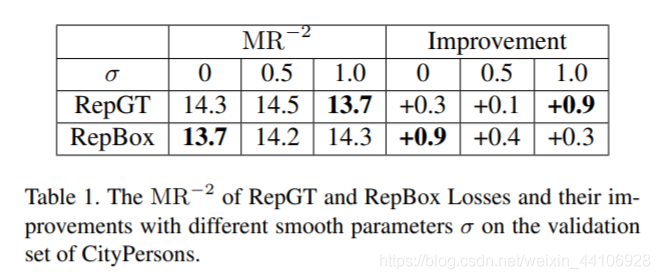 根据不同平滑系数,得到的提升也不一样
根据不同平滑系数,得到的提升也不一样
我们进一步调整两个loss的权重,相对得到了更好的效果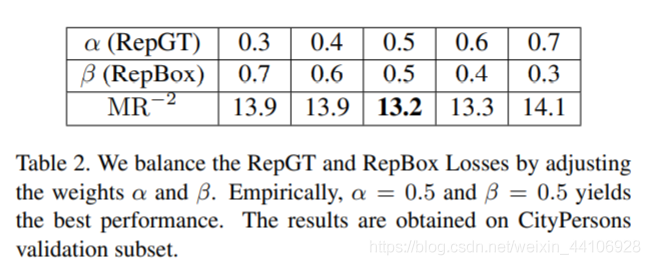
 实验效果图如下,这是未经过NMS处理的锚框图
实验效果图如下,这是未经过NMS处理的锚框图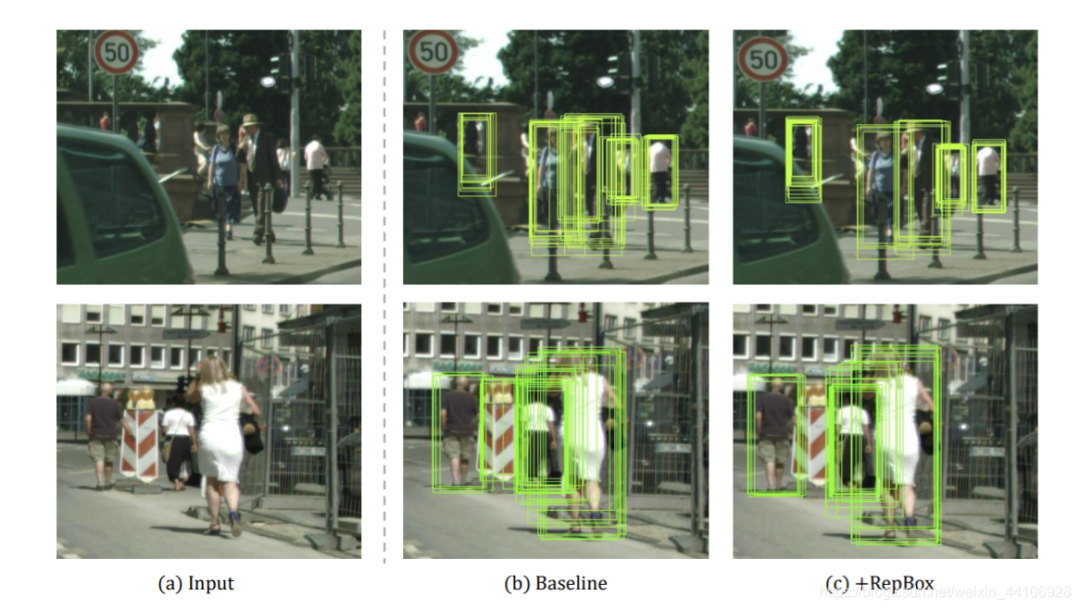 可以看到加了RepBox后,明显少了很多夹在在两个人中间的预测框,这也减少了后续NMS处理出错的情况。
可以看到加了RepBox后,明显少了很多夹在在两个人中间的预测框,这也减少了后续NMS处理出错的情况。
代码解析
这里采用的是这版repulsion loss实现https://github.com/dongdonghy/repulsion-loss-faster-rcnn-pytorch/blob/master/lib/model/faster_rcnn/repulsion_loss.py
def IoG(box_a, box_b):
inter_xmin = torch.max(box_a[0], box_b[0])
inter_ymin = torch.max(box_a[1], box_b[1])
inter_xmax = torch.min(box_a[2], box_b[2])
inter_ymax = torch.min(box_a[3], box_b[3])
Iw = torch.clamp(inter_xmax - inter_xmin, min=0)
Ih = torch.clamp(inter_ymax - inter_ymin, min=0)
I = Iw * Ih
G = (box_b[2] - box_b[0]) * (box_b[3] - box_b[1])
return I / G
该函数用于计算IoG
def repgt(pred_boxes, gt_rois, rois_inside_ws):
sigma_repgt = 0.9
loss_repgt=torch.zeros(pred_boxes.shape[0]).cuda()
for i in range(pred_boxes.shape[0]):
boxes = Variable(pred_boxes[i,rois_inside_ws[i]!=0].view(int(pred_boxes[i,rois_inside_ws[i]!=0].shape[0])/4,4))
gt = Variable(gt_rois[i,rois_inside_ws[i]!=0].view(int(gt_rois[i,rois_inside_ws[i]!=0].shape[0])/4,4))
num_repgt = 0
repgt_smoothln=0
if boxes.shape[0]>0:
overlaps = bbox_overlaps(boxes, gt)
for j in range(overlaps.shape[0]):
for z in range(overlaps.shape[1]):
if int(torch.sum(gt[j]==gt[z]))==4:
overlaps[j,z]=0
max_overlaps, argmax_overlaps = torch.max(overlaps,1)
for j in range(max_overlaps.shape[0]):
if max_overlaps[j]>0:
num_repgt+=1
iog = IoG(boxes[j], gt[argmax_overlaps[j]])
if iog>sigma_repgt:
repgt_smoothln+=((iog-sigma_repgt)/(1-sigma_repgt)-math.log(1-sigma_repgt))
elif iog<=sigma_repgt:
repgt_smoothln+=-math.log(1-iog)
if num_repgt>0:
loss_repgt[i]=repgt_smoothln/num_repgt
return loss_repgt
这是RepGT_loss代码,首先进入predbox的for循环
经过一个for循环遍历,得到除去目标真实框外,与其IoU最大的真实框
再在for循环内,通过IoG函数计算IOG值,并根据smooth ln函数(平滑系数为sigma_regpt)
最后loss总和除以repgt的个数,取得平均值
def repbox(pred_boxes, gt_rois, rois_inside_ws):
sigma_repbox = 0
loss_repbox=torch.zeros(pred_boxes.shape[0]).cuda()
for i in range(pred_boxes.shape[0]):
boxes = Variable(pred_boxes[i,rois_inside_ws[i]!=0].view(int(pred_boxes[i,rois_inside_ws[i]!=0].shape[0])/4,4))
gt = Variable(gt_rois[i,rois_inside_ws[i]!=0].view(int(gt_rois[i,rois_inside_ws[i]!=0].shape[0])/4,4))
num_repbox = 0
repbox_smoothln = 0
if boxes.shape[0]>0:
overlaps = bbox_overlaps(boxes, boxes)
for j in range(overlaps.shape[0]):
for z in range(overlaps.shape[1]):
if z>=j:
overlaps[j,z]=0
elif int(torch.sum(gt[j]==gt[z]))==4:
overlaps[j,z]=0
iou=overlaps[overlaps>0]
for j in range(iou.shape[0]):
num_repbox+=1
if iou[j]<=sigma_repbox:
repbox_smoothln+=-math.log(1-iou[j])
elif iou[j]>sigma_repbox:
repbox_smoothln+=((iou[j]-sigma_repbox)/(1-sigma_repbox)-math.log(1-sigma_repbox))
if num_repbox>0:
loss_repbox[i]=repbox_smoothln/num_repbox
return loss_repbox
这是RepBox loss代码,第一个for循环也是进入到预测框。然后一个小for循环用来计算overlap,这里还设置一个if语句块,用来排除相同的集合(因为我们要保证两个集合是互斥的子集)。随后与RepGT类似,计算smoothln函数,最后取平均返回
总结
旷厂的这篇算法工作做的还是很扎实的,作者先是对数据集进行分析,进而根据遮挡度,拆分出两个子集,通过直观的统计来表明行人遮挡是检测行人的一大难点。然后从预测框和NMS处理上出发,找到问题所在,进而提出RepLoss,其中两项loss分别针对两个独立的问题。简单改进模型后,加上RepLoss的效果展示还是非常不错的。
- END -欢迎关注GiantPandaCV, 在这里你将看到独家的深度学习分享,坚持原创,每天分享我们学习到的新鲜知识。( • ̀ω•́ )✧
有对文章相关的问题,或者想要加入交流群,欢迎添加BBuf微信:
为了方便读者获取资料以及我们公众号的作者发布一些Github工程的更新,我们成立了一个QQ群,二维码如下,感兴趣可以加入。