
让检测告别遮挡 | 详细解读NMS-Loss是如何解决目标检测中的遮挡问题?

1简介
非极大值抑制(Non-Maximum Suppression, NMS)在目标检测中至关重要,它通过合并假阳性(FP)和假阴性(FN)影响目标检测结果,尤其是在人群遮挡场景中。在本文中提出了NMS造成的训练目标和评估指标之间的弱连接问题,并提出了一种新的损失函数NMS-loss,使NMS过程可以端到端地被训练而不需要任何附加的网络参数。
NMS-loss惩罚2种情况,即FP没有被抑制,而FN被NMS错误地删除。具体来说,NMS-Loss提出了pull loss将具有相同目标的预测拉得很近,以及push loss将具有不同目标的预测推得很远。
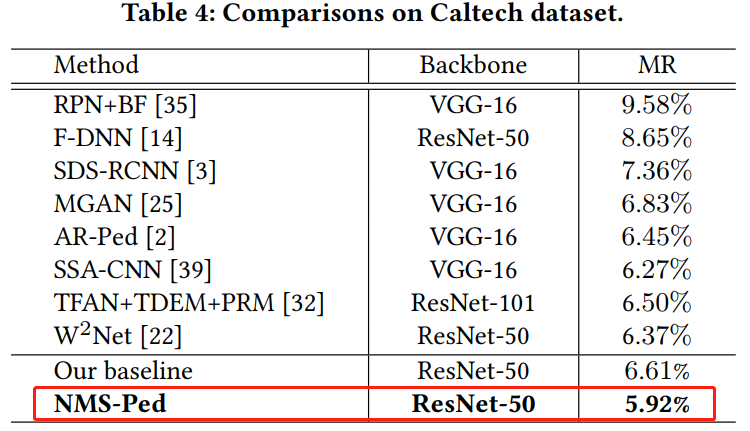
实验结果表明,在NMS-Loss的帮助下NMS-Ped检测器在Caltech数据集上的Miss Rate为5.92%,在CityPersons数据集上的Miss Rate为10.08%,均优于现有的同类检测器。
本文主要贡献
首先提出了行人检测中训练目标与评估指标之间的弱连接问题,并提出了一种新的NMS-loss,使NMS过程在不引入任何参数和运行时间开销的情况下可以端到端进行训练。
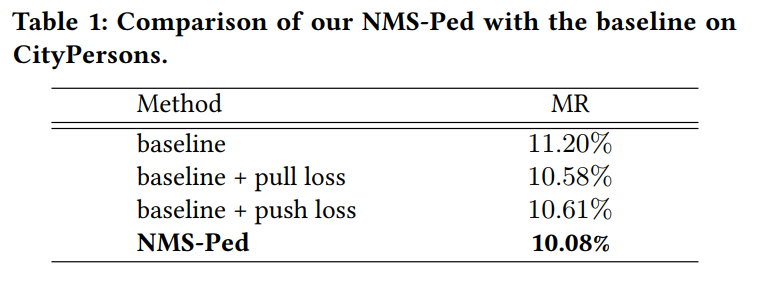
作者提出了精心设计的pull loss和push loss,分别考虑预测坐标和置信度,帮助网络提高精度和召回性能。
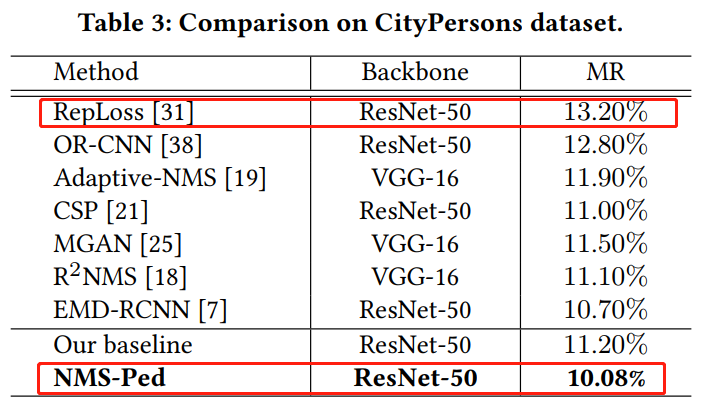
在行人检测中,作者借助NMS-Loss提出的NMS-Ped在Caltech和CityPersons数据集上优于现有的SOTA方法。
2NMS-LOSS
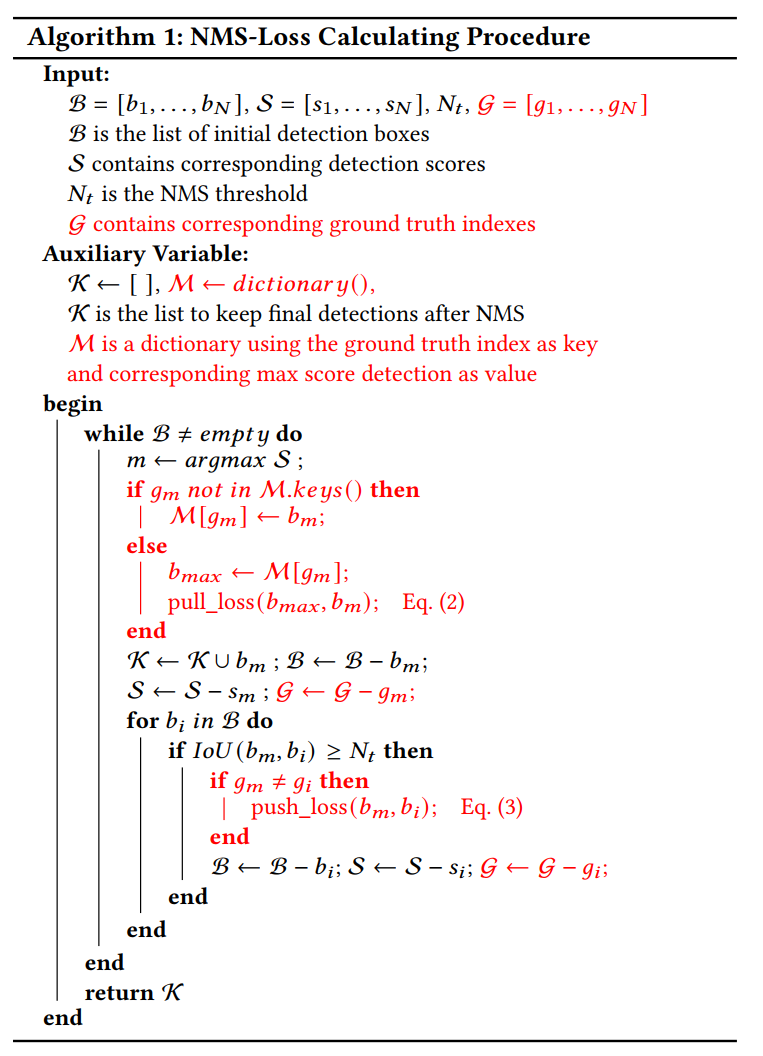
传统的NMS流程如Alg.1中所示,没有考虑红色字体。
NMS从一组得分为S的检测框
开始,
首先,将得分最大的proposal
从
集合移动到最终保留检测的集合
;
然后,删除
中得分为
的且与
的重叠高于阈值
的框。
对剩下的
集重复此过程。
但是,现有的方法没有将NMS纳入训练过程中来调整检测框,使得学习目标与评价指标不一致,这意味着NMS未抑制FP和NMS消除FN分别会损害精度和召回率。为了避免不一致,作者提出NMS-loss将NMS程序引入到训练过程中,自适应地选择由NMS引起的错误预测,并使用精心设计的pull和push两种损失来最小化FP和FN。具体来说NMS-Loss定义为:

其中
为pull损失用来惩罚FP同时不抑制由NMS,
为push损失用来惩罚NMS的FN错误删除。系数
和
是平衡损失的权重。
NMS-Loss的细节在Alg.1中用红色文本强调。与传统pipeline不同,这里使用一组
,包含相应的检测框ground truth index,用于识别FP和FN。在NMS-Loss计算过程中,M是一个辅助字典,以ground truth指数为key,对应最大检测得分为value,用来记录每个ground truth的max score预测。
NMS-loss自然地合并到NMS过程中,而不包含任何额外的训练参数。对于测试来说,NMS-Loss的运行时成本为零。
2.1 定义Pull Loss
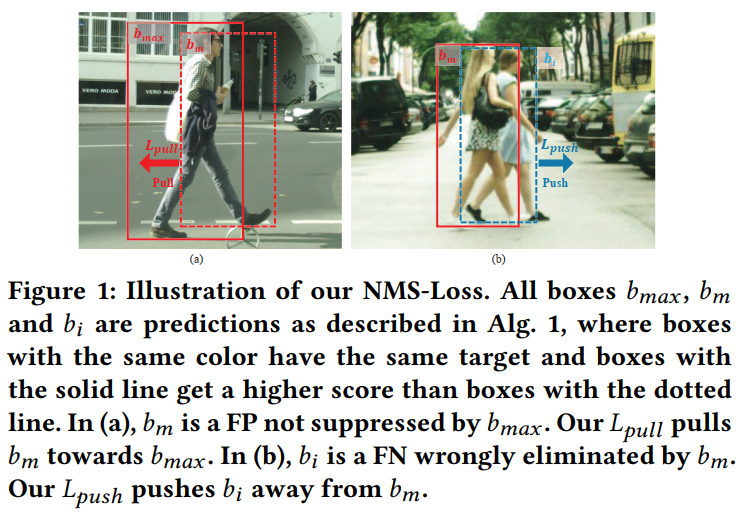
以降低FP为目标需要找出错误的预测。为此,在每次迭代中检查当前的max score预测
是否为其对应的
ground truth的max score预测。如果不是,则说明
是一个未被NMS抑制的FP,pull loss应在
和
ground truth的max score prediction
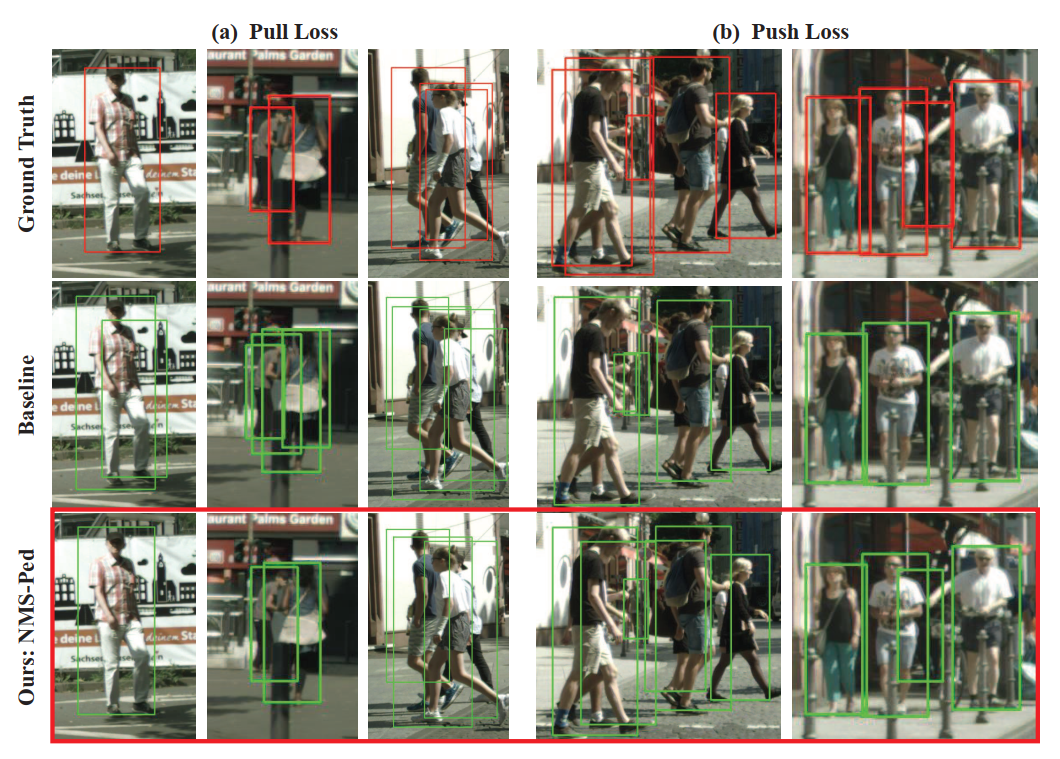
之间执行(见图1)。形式上pull loss计算如下:

其中
为预定义的NMS阈值,
为对应于
的预测score。
作者注意到pull loss的2个特性:
当
和
之间的IoU较小时,pull loss有增加的趋势,迫使网络学会将
拉向
。NMS的阈值
用于防止异常值的梯度对模型学习的影响过大。另外,对于NMS只需要使FP和TP之间的IoU高于
即可。在pull loss中使用
来减小异常值的梯度,可以使网络易于学习和收敛。
FP预测得分对pull loss也有较大影响。FP得分越高,对评价结果的影响越大,直观上需要更多的关注。此外,它使网络学习修正FP不仅要制约box坐标,而且要考虑降低预测分数。
2.2 定义Push Loss
在NMS中,当前的最大score预测
用
消除了获得高于
的IoU的box。如果剔除的框
对应的ground truth index 与
不同,则
为FN,降低召回率(见图1)。为了避免错误地删除
提出push loss来惩罚FN:

其中
为
对应的预测得分。与pull loss不同当
时,push loss增大,模型学会将
推离
。为了避免模型倾向于通过降低FN的分数来减少push loss,作者只使用
来重新加权损失,而不使用反向传播梯度。
对于拥挤的场景,特别是在CityPersons数据集中,边界框的ground truths是相互重叠的。在IoU=0的情况下,将他们的预测相互排斥是不合理的。为了处理这个问题,作者只在预测IoU高于其对应ground truth box的IoU时才计算
。
本文所提的Pull Loss和Push Loss是根据预测来执行的。当pull/push loss被激活时,网络会尝试pull/push两个预测,分别pull/push彼此。因为高分预测通常会得到一个更准确的位置,所以在一个不准确的预测基础上移动一个准确的预测是不合理的。为了解决这个问题,作者停止了高分预测的梯度向后传播,导致网络专注于错误的预测。
2.3 与RepLoss的不同之处在哪里?
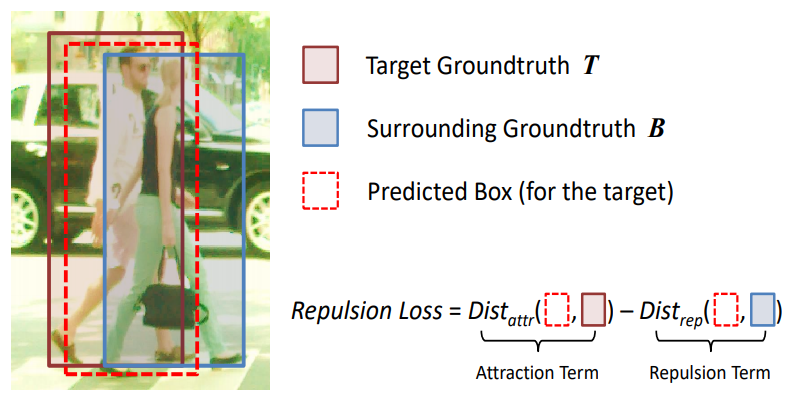
RepLoss通过设置损失函数的方式,使预测框和所负责的真实目标框的距离缩小,而使得其与周围非负责目标框(包含真实目标框和预测框)的距离加大 。如下式,如果与周围目标的距离越大,损失值会越小。

作者对NMS-Loss和RepLoss进行了详细的比较,因为这2种方法都是基于它们的目标进行pull/push预测的。
主要有3个区别:
RepLoss在所有实例上执行,而NMS-Loss只在被NMS错误处理的实例上执行,从而实现了端到端训练。
RepLoss只考虑回归,而score在NMS-Loss中也用于实例重加权。
在密集人群场景下RepLoss将实例推开,即使它们的目标本来很接近,使RepLoss与回归损失相矛盾。相反,NMS-Loss会推送与其他IoU高于其对应ground truth box IoU的实例,这样可以消除RepLoss的矛盾。
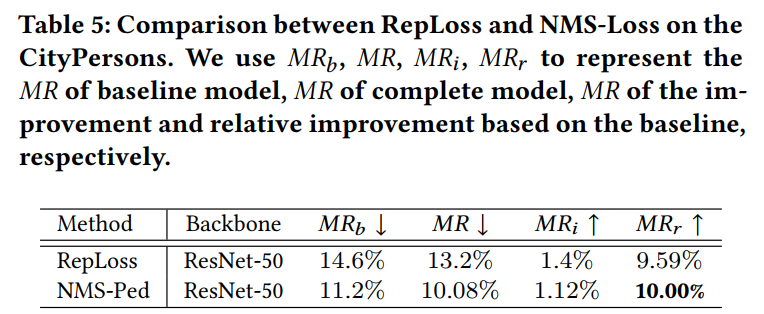
如表所示,NMS-Loss不仅比RepLoss表现更好,而且在CityPersons上有更高的相对改善。这表明,NMS-Loss可以在广泛使用的数据集上实现稳定的相对改进(高于10%)。
3实验
4参考阅读
[1].NMS-Loss: Learning with Non-Maximum Suppression for Crowded Pedestrian Detection
[2].Repulsion Loss: Detecting Pedestrians in a Crowd
5推荐阅读

即插即用 | 卷积与Self-Attention完美融合X-volution插入CV模型将带来全任务的涨点(文末附论文)
Transformer | 详细解读Transformer怎样从零训练并超越ResNet?
YOLO |多域自适应MSDA-YOLO解读,恶劣天气也看得见(附论文)

Transformer | 没有Attention的Transformer依然是顶流!!!
本文论文原文获取方式,扫描下方二维码
回复【NMS-Loss】即可获取项目代码
长按扫描下方二维码添加小助手并加入交流群,群里博士大佬云集,每日讨论话题有目标检测、语义分割、超分辨率、模型部署、数学基础知识、算法面试题分享的等等内容,当然也少不了搬砖人的扯犊子
长按扫描下方二维码添加小助手。
可以一起讨论遇到的问题
声明:转载请说明出处
扫描下方二维码关注【集智书童】公众号,获取更多实践项目源码和论文解读,非常期待你我的相遇,让我们以梦为马,砥砺前行!
