
直播预告:深度学习驱动下的相机标定技术发展
个人介绍:
廖康博士,毕业于北京交通大学信息科学研究所,师从林春雨教授。将赴新加坡南洋理工大学S-Lab担任博士后研究员,合作导师为Chen Change Loy。曾于德国马克斯·普朗克研究所(马普所)访问一年。研究方向为面向大视场的计算机视觉、3D视觉、生成模型等。相关研究成果发表至CVPR, ICCV, ECCV, ICRA, TIP等。
背景:
相机标定在计算机视觉和机器人等领域中占据举足轻重的地位,它为后续场景理解及决策推断提供了标准化的成像空间和精准的几何先验。然而,传统的相机标定技术常常依赖于繁琐的人工干预和特定的场景假设,因此难以灵活拓展至不同的相机模型和标定场景。近年来,基于深度学习的解决方案展现出代替手动操作、摆脱场景假设的潜力,实现了全自动化的相机标定技术。在这些方案中,各种各样的学习机制、网络架构、先验知识、优化函数、数据集等方面均得到了广泛的研究。
报告导读:
(1)涵盖了深度学习时代以来各类相机模型标定及其应用的最新研究进展;
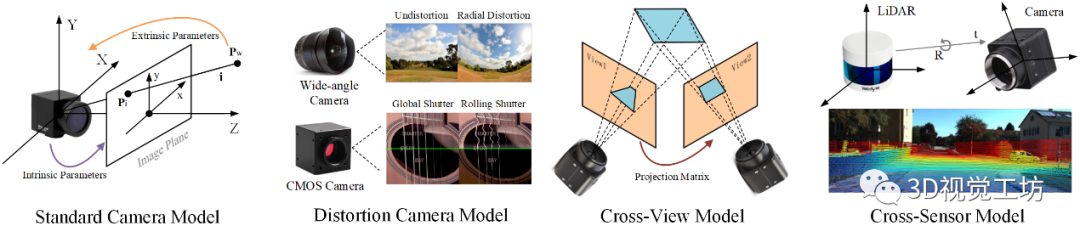
(2)主要探索的标定类别包括标准针孔相机模型、畸变相机模型、跨视角模型和跨传感器模型等;
(3)整合、构建了一个公开且全面的评测基准数据集,可作为开放平台用于不同研究方法的性能评测;
(4)讨论了整个基于深度学习的相机标定领域仍然存在的挑战以及未来可能的研究方向。
评论