
RGBD深度相机如何标定?
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

摘要
常见的消费级RGB-D相机具有粗略的内参和外参校准数据的,通常无法满足许多机器人应用所需的精度要求。我们的校准方法基于一种新颖的双分量测量误差模型,该模型统一了基于不同技术RGB-D相机的误差源,如结构光3D相机和飞行时间相机,提出的的标定模型使用两种不同的参数实现对图像的矫正,这两种图通过控制函数的线性组合提供校准读数,非线性优化算法在单个优化步骤中细化相机深度传感器刚性位移以及上述参数,确保结果高度可靠。
主要贡献
本文的主要贡献如下:
一个通用的、可实现的测量误差模型,该模型以统一的方式很好地描述了不同深度传感器类型的误差。
一种空间和参数不畸变图像,以紧凑有效的方式模拟结构光深度传感器的畸变模型
一种新的优化框架,在估计摄像机深度传感器刚性位移以及描述深度测量系统误差的参数模型
提出方法的开源实现,集成在ROS(机器人操作系统)框架内。
内容介绍
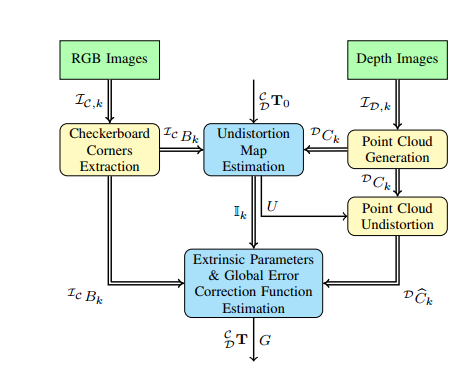
标定算法流程

深度图矫正,不同距离的一面墙的点云矫正后的结果

校准后的RGB图与深度图配准与使用默认校准参数生成RGB图与深度图配准结果的对比

总结
本文提出了一种通用RGB-D传感器标定的新方法,开源的校准程序仅要求用户在最小结构的环境中收集数据,并在输出中提供传感器的内参和外参数据,通过两个不同的分量,一个畸变误差和一个全局系统误差来概括深度传感器误差,畸变误差使用每像素参数无畸变图建模,在算法的第一阶段进行估计,在算法的第二阶段,在鲁棒优化框架内,估计深度系统误差以及摄像机深度传感器对准,文章用几个传感器进行了详尽的实验,结果表明,该方法提供了高度精确的结果,优于其他最先进的方法。与其他方法相比,方法非常适合不同类型的深度传感器,同时需要相对简单的标定要求。
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~