
SLAM | 详解前端跟踪及后端优化算法
视觉SLAM是通过两帧或多帧图像来估计自身的位姿变化,再通过累积位姿变化计算当前位置。视觉SLAM不仅解决了移动机器人“我在哪里”的关键问题,而且在传感器自身定位、路径规划及场景理解等问题中都有关键作用。
视觉SLAM现已广泛应用于机器人、自动驾驶、虚拟现实和增强现实等领域,市场需求大,薪资待遇高,近一年视觉SLAM算法工程师平均工资高达25K/月,其中34.9%的算法工程师薪资水平更是高达30K~50K/月。
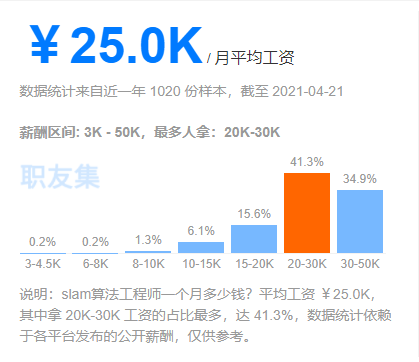
(来源:职友集)
看到行业前景广阔,很多伙伴想要入门学习视觉SLAM,但由于SLAM学习需要扎实的线性代数与概率论基础、三维几何理解、以及深厚的C++编程功底,导致大家在入门时就遇到瓶颈。再加上学习中无法将零散的知识点多,抓不到重点,很难构建完整的SLAM知识系统,遇到问题更是无人解答,致使很多同学“入门即放弃”。
基于此,深蓝学院推出『视觉SLAM理论与实践』课程,课程自2017年12月开始打磨研究,至今已顺利开设了九期。课程以系统全面的知识讲解和精心设计的实践项目,让SLAMer真正掌握扎实系统的专门知识,同时培养良好的工程实战能力。
讲师介绍
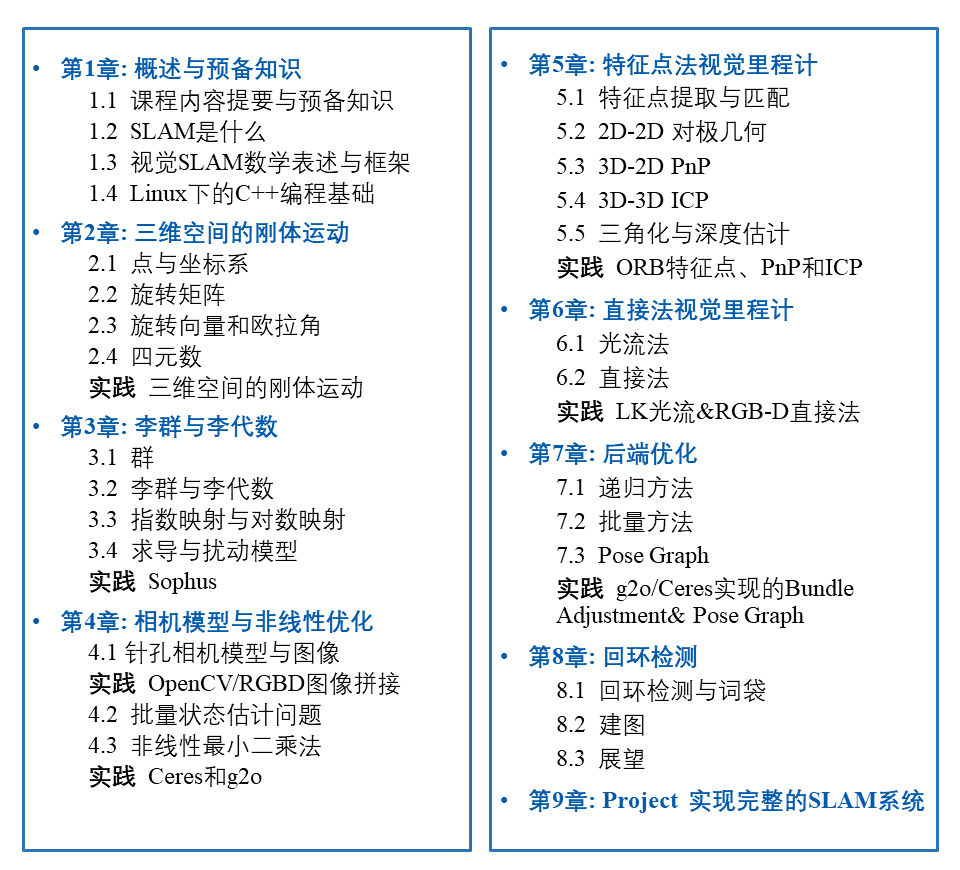
课程大纲
学后收获
1. 具备实现完整SLAM系统的能力
还能收获
伙伴们大多是来自985、211及海外院校硕博,在这里大家一起学习、讨论与研究。独一无二的优质圈子将是你未来学习与就业的宝贵资源。
2. 企业认可的证书
学完课程后将有机会收获优秀学员证书、毕业证书,为你的简历加分添彩。(目前已有100+企业通过深蓝学院招聘SLAM算法工程师)

部分企业截图
课程服务
· 抢占学习名额 ·
添加「新月」
咨询更多内容~
评论