
基于自适应显着性的图像分割(源码开放)
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
来源:小白学视觉
本文介绍算法的源码在github上给出
https://github.com/TimChinenov/GraspPicture
成产品及系统平台的现场演示,编写技术应用服务方案等,编写投标类方案文件及标书的制作;
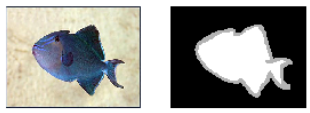
通常,当我们看到一张图片时,会在图片中聚焦一个焦点。这个可能是一个人,一座建筑物甚至是一个桶。其他没有聚焦区域虽然很清晰,但是却由于颜色单调或者纹理较为平滑而很少引起关注。当遇到此类图象时,我们希望从图像中分割感兴趣的对象。下面给出了显着图像的示例,本文探讨了此类显着图像的分割方法,也称为显着性的图像分割。

显着图像的示例。桶(左)和人(右)是感兴趣的对象
这中分割方式最开始起源于希望能够自主寻找图像中的Trimap。Trimap是图像掩码(mask),当与掩码算法配合使用时,可用于分割图像,同时能够提示前景和背景之间的细节。Trimap通常包含定义前景的白色区域,定义背景的黑色区域以及代表不确定区域的灰色区域。具体形式如下图所示。
Trimap示例
大部分抠图算法问题在于,他们希望Trimap由用户提供,这是一项非常耗时的任务。这里面介绍两个试图解决自主trimap生成问题的相关论文,这两篇论文在文末给出。在第一篇论文中使用了一种相当简单且易于实现的方法。不幸的是,他们的方法并不是完全自主的,因为它要求用户为Grabcut算法提供一个矩形区域。第二篇论文中,使用显着性方法预测感兴趣的区域。但是,它们的显着性方法非常复杂,将三种不同的显着性算法的结果结合在一起。这三种算法中有一种利用卷积神经网络,为了易于实现,应该尽量避免这种技术。
如果忽略需要人为给出矩形区域,第一篇论文中能够产生较好的分割结果。通过第二篇论文的原理去自动给出一个Grabcut算法的矩形区域,那么将完美的解决自主分割的问题。
对于大多数形式的图像分割,目标都是将图像二值化为感兴趣的区域。这个本文介绍方法的目标也是这样的。首先,大致确定感兴趣的对象在哪里。将高斯模糊应用于图像,之后在模糊图像中生成平均15像素大小的超像素。超像素算法旨在根据像素区域中值的颜色和距离来分解图像。具体来说,使用了简单的线性迭代聚类(SLIC)算法。具体形式如下图所示。
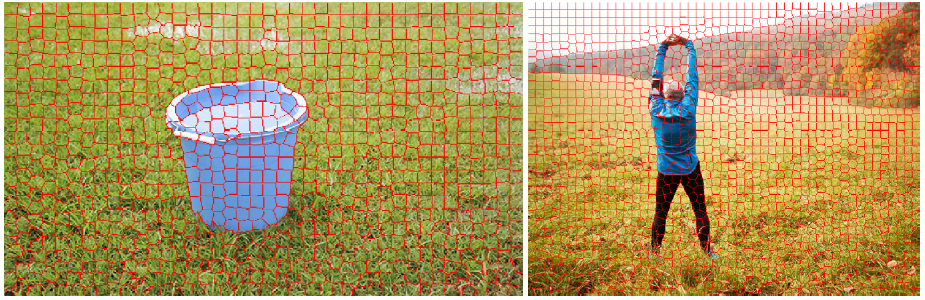
一个桶和一个人的超像素划分结果
超像素将图像分解为大致相同的区域。这样的一个优点是,超像素允许区域的泛化。我们可以假设超像素内的大多数像素具有相似的属性。
在确定图像中的超像素的同时,计算图像的显着性图。使用了两种不同的显着性技术。第一种方法使用OpenCV内置的方法,即所谓的细颗粒显着性。第二种方法涉及获取细颗粒显着性图像的平均值,然后从图像的高斯模糊版本中减去平均值,然后是新图像的绝对值。
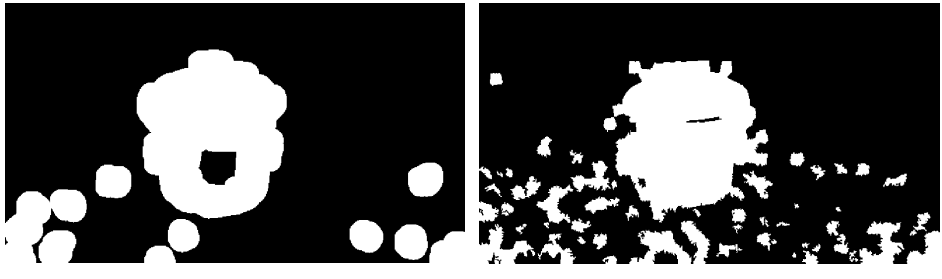
下方的图像均突出显示了感兴趣的区域。细颗粒显着性产生的图像较为柔和。此外,细颗粒显着性图像主要勾勒出突出图像的边界。而另一种方法虽然也捕获了突出图像的内部,但是与细颗粒方法相比,该方法会产生更多的噪音。之后需要对噪声进行去除。
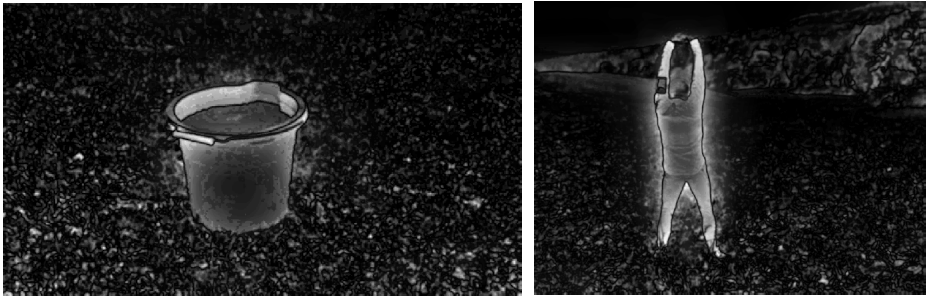
第一种显着性结果
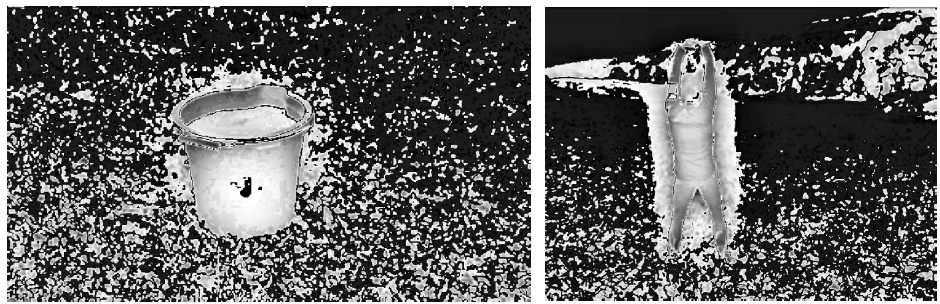
第二种显着性结果
为了将图像二值化,对从彩色图像生成的每个超级像素进行迭代。如果显着图像内该超像素区域的中值像素值大于阈值T1,则整个超像素将被二值化为白色。否则,整个超像素将保留为黑色。T1由用户选择,一般情况下,将T1设置为显着图像中最大像素值的25%-30%。
在对图像进行二值化之后,基于所使用的显着性技术对图像进行扩张。在第一种方法中,将图像放大为平均超像素尺寸的两倍。在第二种方法中没有进行扩大,因为图像中存在的较大噪声使扩张风险增大。处理的结果在下面给出。
最后一步操作取决于使用的是哪种显着性。在这两种方法的结果中,都提取最大的白色像素区域。通过查找图像中的轮廓并选择面积最大的轮廓来执行此操作,之后将边界框拟合到所选区域。
根据一般性结果,第一种显着性方法通常会导致区域碎片化。生成边界框后,将落入该框的不属于最大区域的所有其他白色区域添加到该框。框的边界增加到包括这些区域。第二种显着性方法不需要这样做。通常,最大获取的区域会超出期望的数量。
最后一步是将最终找到的边界框提供给Grabcut算法。Grabcut是用于分割图像的常用方法,该方法会将绝对是背景和前景的内容分开。这里面我们直接使用OpenCV的内置Grabcut函数。处理的结果如下所示。

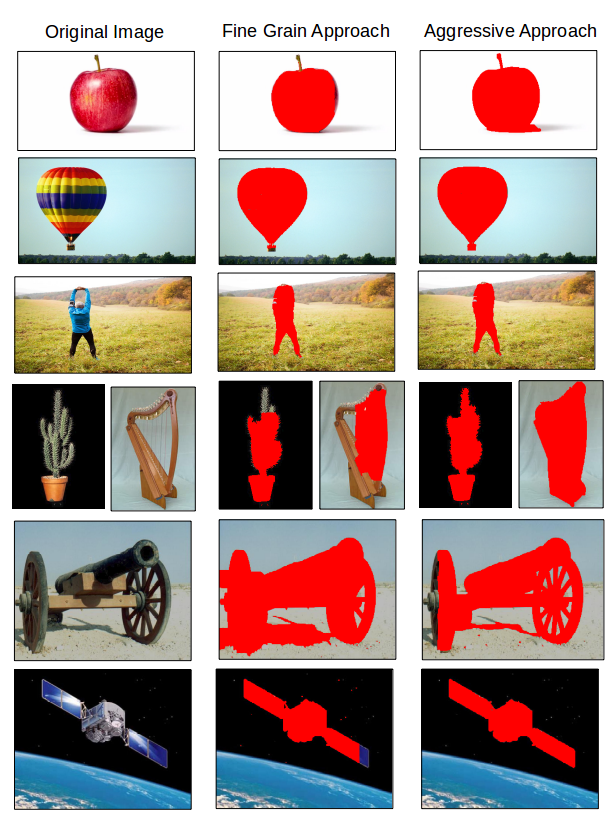
两种显着性计算方法对于结果会有一些影响。第一种显着性方法更加适用于含有噪声的图像中,在含有噪声的图像中不会像第二种显着性方法造成分割结果的溢出。,但是如果图像太长或有卷须,则这些部分通常会与图像的其余部分断开连接。
下面是这两种方法分割更多图像的示例结果。
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!