
ISO 22737 全文翻译与解读-上半
下载地址在文末
近期因为工作需要研读了ISO 22737,同时想起了这个落灰已久,但依然每个月会给我贡献2块左右广告收入的公众号了,回想起早年两天一发的高产,现如今已经一年都发不了一次了,实属惭愧,希望后续可以恢复往日的鼎盛,与在路上的各位朋友一起进步。
先来简单介绍一下ISO 22737,该标准发布于2021年7月,适用的对象为预定路线的低速自动驾驶(Low-speed automated driving,LSAD)系统,也就是最大速度不超过8.89米/秒(32公里/小时)且起点到终点之间行驶路线在系统启动前已经被确定好的自动驾驶系统。 港口、矿山、机场、工业园区、校园等,是搭载这类系统自动驾驶车辆的常见落地场景。比如港口中负责岸桥和堆场间负责水平运输任务的集卡或平板车;比如校园里负责驿站和宿舍之间运送快递的小车等。 该标准由英国华威大学Siddartha Khastgir博士领导的国际专家组制定,同时得到了英国互联与自动驾驶汽车中心(CCAV)和创新英国(Innovate UK)资助的WMG和Aurrigo INTACT项目的研究成果支持,以及Khastgir博士在英国研究与创新部门(UKRI)未来领袖奖学金资助期间的部分研究成果。
ISO 22737:2021 智能运输系统—预定路线的低速自动驾驶(LSAD)系统—性能需求、系统需求及性能测试步骤
本文对ISO22737前7章节通篇翻译,并从个人角度出发,提供部分解读,同时附件英文版原文,供大家参考,对于有错误的地方,欢迎大佬指正。后半部分章节请在公众号内查找。
前言等部分跳过,我们直接进入正文。
1.范围
本文件规定了
•操作设计域(ODD)的要求; •系统要求; •最低的性能要求; •性能测试程序;
在预定路线上运行的低速自动驾驶(LSAD)系统的安全运行。LSAD系统被设计为在特定的运行设计域(ODD)内以L4级自动化(见ISO/SAE PAS 22736)运行。 本文件适用于自动驾驶系统专用车辆(ADS DV),也可用于双模车辆(见ISO/SAE PAS 22736)。本文件未具体说明LSAD系统驱动的车辆中存在的传感器技术。
2.引用文件
以下文件在文本中被提及,其部分或全部内容构成本文件的要求。对于有日期的参考文献,只适用于所引用的版本。对于未注明日期的参考文件,适用于所参考文件的最新版本(包括任何修正案)。
•ISO 19206-2, Road vehicles — Test devices for target vehicles, vulnerable road usersand other objects, for assessment of active safety functions — Part 2:Requirements for pedestrian targets •ISO 19206-3, Road vehicles — Test devices for target vehicles, vulnerable road usersand other objects, for assessment of active safety functions — Part 3:Requirements for passenger vehicle 3D targets •ISO 19206-4, Road vehicles — Test devices for target vehicles, vulnerable road usersand other objects, for assessment of active safety functions — Part 4:Requirements for bicyclist targets •ISO 26262 (all parts), Road vehicles — Functional safety •ISO 21448: Road vehicles — Safety of the intendedfunctionality •ISO/SAEPAS 22736: Taxonomy and definitions for terms related to driving automationsystems for on-road motor vehicles
3.术语和定义
在本文件中,ISO/SAE PAS 22736中给出的术语和定义以及以下内容适用于本文件。 ISO和IEC在以下地址维护用于标准化的术语数据库。
•ISO在线浏览平台:可在https://www.iso.org/obp •IEC Electropedia:可在http://www.electropedia.org/
3.1 危险情况
障碍物(如骑自行车的人、行人、车辆等)的位置、方向和运动相对于LSAD系统驾驶的车辆的位置、方向和运动,可能导致即将发生碰撞的情况。
3.2 预定路线
由LSAD系统驾驶的车辆在行程开始前确定的轨迹,从一个出发点到一个(或多个)目的地。 注释:由LSAD系统驾驶的车辆的一次出行可能有许多目的地。一个预定的路线有长度和曲率,但没有宽度。
3.3 最小风险策略(MRM)
为实现风险最小,LSAD系统控制的车辆执行的策略或动作。
3.4 行程段
在一次出行中,从出发点到目的地或从一个目的地到另一个目的地行程。 注释:一个行程可能包括多个行程段。
3.5 可行驶区域
在预定路线(3.2)周围的可操纵区域,LSAD系统能够在该区域运行。 注释: 可驾驶区域的宽度可以沿着预定路线变化。
3.6 骑自行车的人
人与自行车的组合体,由骑在轮架上的人组成,有转向装置、刹车、两个踏板推进(可选择电机辅助踩踏),不需要在公共道路上使用的许可证。
3.7 白天
环境光照度大于2000lx的情况。
3.8 夜间
环境照度小于1lx的情况。
3.9 静止状态
车速为0m/s时的车辆状态
3.10 低速自动驾驶系统(LSAD)
最大速度为8.89m/s的自动驾驶系统。
3.11 低环境照明条件
白天(3.7)和晚上(3.8)之间的环境光线。
4.符号与缩写
以下符号主要在各种场景图片中频繁出现,具体问题可以翻到这里来核对。
•θ:在直线路段上评价路径时,行人轨迹与车辆轨迹之间的角度 •ADS-DV:自动驾驶系统专用车辆 •DDT:动态驾驶任务 •e-stop:紧急停车 •LSAD:低速自动驾驶 •MaaS:出行即服务 •MRC:最低风险条件 •ODD:运行设计域 •R:可驾驶区域内的轨迹曲率半径 •RTI:请求干预 •Slat1:可驾驶区的宽度 •Slat2:SV与行人起点之间的横向距离 •Slat3:SV和目标车辆 (TV1 和 TV2)之间的横向距离 •Slat4:减少的可驾驶区宽度 •Slong:可驾驶区域纵向距离 •Slong2:评价路径与工况C的纵向距离 •Slong3:点1和点4之间的纵向距离 •Slong4:触发MRM的点1和点4之间的纵向距离 •Slong5:4号点与评价路径终点之间的纵向距离 •SV:被控车辆 •Tped_to_Pt2:行人到达第2点所需时间 •Tpc_to_Pt2:骑车人到达第2点所需时间 •TV(1,2):目标车辆(1,2) •V2X:车辆对外界的通行,即Vehicle to everything •VLSAD:LSAD的速度 •VLSAD_max:LSAD系统的最大速度 •Vpc:骑车人的速度 •Vpc_max:骑车人最大速度 •Vped:行人速度 •Vped_max:行人最大速度 •Vsv_max:被控车辆最大速度 •VRU:道路使用者 •DDT:动态驾驶任务
5.LSAD系统部署的用例范例
LSAD系统驾驶的车辆可以作为MaaS系统的一部分。图1描述了一个MaaS系统的结构示例。但是,本文的范围仅限于图1中部署在车辆中的LSAD系统。
按照图1中的例子,LSAD系统通过无线通信从调度员那里接收行程目的地,而调度员又从用户那里接收目的地请求(通过门户网站或移动应用程序。调度员或控制中心处理目的地请求,向用户提供行程/行程段确认,并命令LSAD系统驾驶的车辆继续前进。本文中的术语 "调度员 "是指无人驾驶操作调度员(见ISO/SAE PAS 22736)。
由于到达目的地的预定路线可能不止一条,所选择的预定路线可以是:
1)由调度员/控制中心提供。
2)由用户通过移动应用程序的用户界面或配备LSAD系统的车辆上选择。
3)由LSAD系统本身选择。
LSAD系统定期向用户和调度员/控制服务器提供其状态(如系统健康、行程状态)。
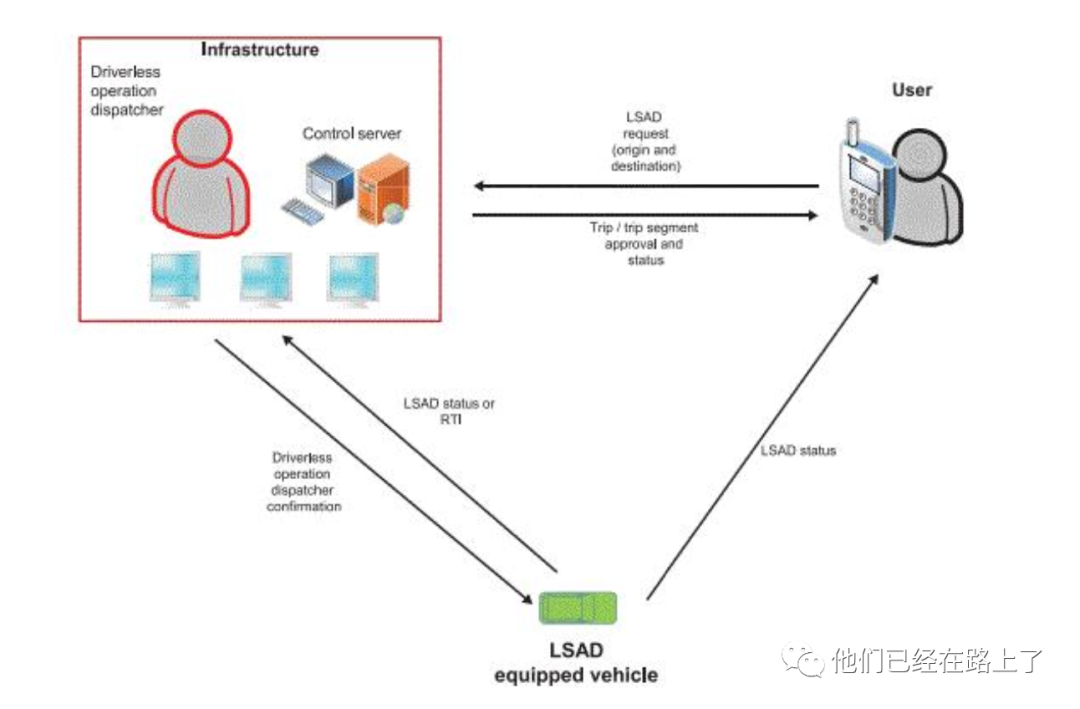
图1 系统结构实例-MaaS系统中的LSAD
6.LSAD系统结构
图2表示单个LSAD系统的系统架构。图2还强调了本文件范围内的LSAD系统架构的组成部分。
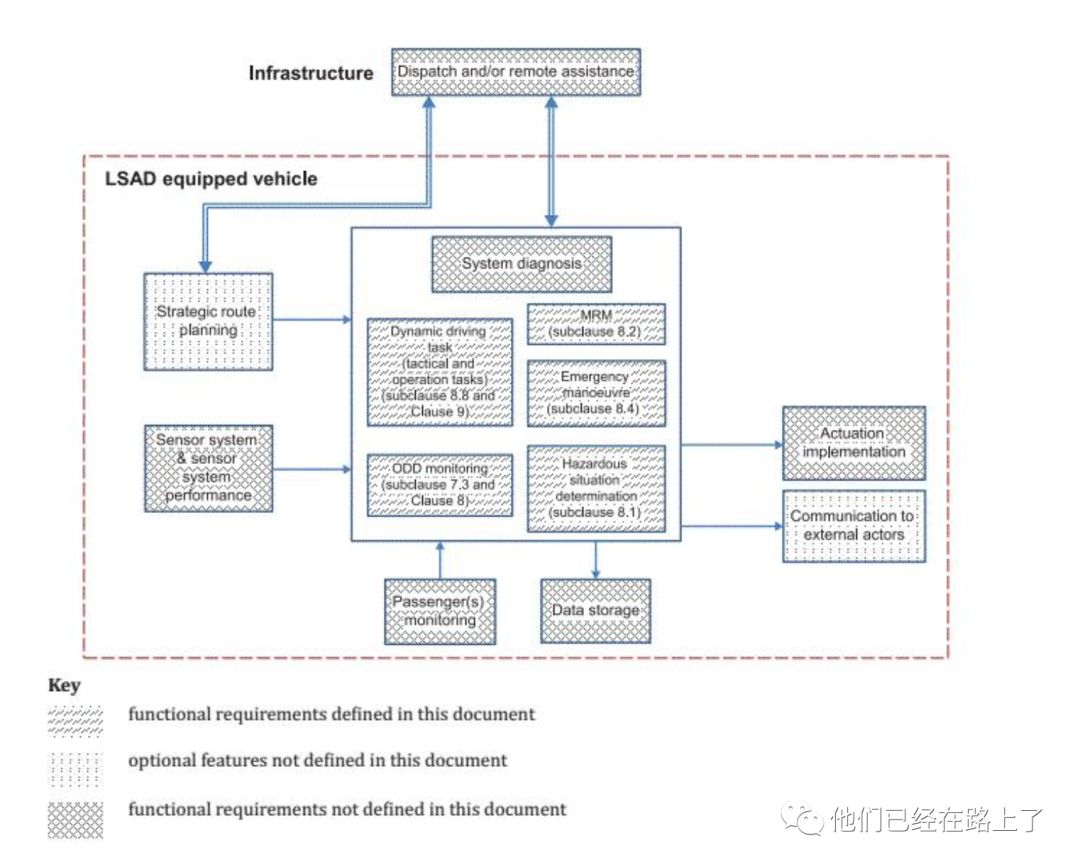
图2 系统结构实例-单个LSAD系统
重新画图太麻烦了,简单总结下,这张图中,红色框是指LSAD,也就是无人车,中间的蓝色部分是本文的重点,具体内容看英文后边的序号就知道对应哪个章节了。
7.基础要求
7.1 一般要求
LSAD系统应执行动态驾驶任务(见ISO/SAE PAS 22736)。驾驶任务的策略(见ISO/SAE PAS 22736)的实施由制造商决定。然而,LSAD系统应只在预定的路线上运行。启用LSAD系统的车辆的最大运行速度应等于或低于8.89m/s或32km/h。然而,根据本文件中提到的特殊条件(根据无人驾驶操作调度员的酌情选择[ISO/SAE PAS 22736]),例如一天中的时间、能见度、星期几、降雨、雪、雾、道路上的冰等,这个速度可能会大大降低)。
LSAD系统应使用传感器,以实现部分动态驾驶任务。这包括探测物体、车辆、行人、建筑物、路径等。应针对传感器性能和故障以及其他安全关键系统元素进行适当的危险分析和风险评估。LSAD系统的开发应根据ISO 26262系列和ISO 21448进行。
7.2 最低操作能力
由LSAD系统驾驶的车辆应能执行以下功能:
a) 按照预定的路线到达目的地(8.3);
b) 检测危险情况(8.1);
c) 启动制动和/或转向,以减轻和/或避免与障碍物的碰撞(9.1,9.2);
d) 进行最小风险的操纵(8.2);
e) 通知调度员LSAD系统的故障状态(例如二进制标志)(8.4);
f) 在出现危险情况时向道路使用者提供警告。
7.3 运行设计域(ODD)
每个LSAD系统都应由制造商定义其ODD。一个LSAD系统的ODD限制应至少规定以下属性:
a)低速:LSAD系统的速度应等于或低于8.89米/秒或32公里/小时;
b)适用范围:例如,限制进入或专用道路(公共或私人),或行人/自行车道,或限制所有或某些特定类别机动车进入 的区域。限制通行的道路可以通过车道标记或速度限制或物理分界来指定。(示例见附件D);
c) 预定义路线:在LSAD系统运行之前,在LSAD系统内定义的路线。一个LSAD系统只能在预定义的路线上运行。预定义路线应由相关的利益相关者共同定义(例如,地方当局、服务提供商、制造商等)。任何对预定路线的偏离都应由调度员确认不会导致危险情况;
d)应用区域的照明条件;
e)天气状况;
f)道路状况;
g)存在或不存在VRU;
h)可驾驶区域内可能存在的静态障碍;
i)网联要求。
LSAD系统或调度员应根据当前的ODD条件(如雾天条件、夜间照明条件),在ODD属性预定值的范围内为指定的应用选择操作值(对于LSAD系统驾驶的车辆)。 举例:调度员或LSAD系统可以决定将雨天的最大允许速度限制为低于晴天的速度。
7.4 LSAD状态转换图
本章节主要介绍LSAD系统需具备的几个基础状态和状态之间的转化条件。此外,标准也明确了,除了基础状态及转换关系外,还可以进行适当的扩展,以适应调度员的输入来调整状态模式,例如,在调度员确认的情况下,车辆可以在ODD外行驶一段时间。
LSAD系统应按照图3的状态转换图运行。超出图3描述的具体实施应是制造商的责任。
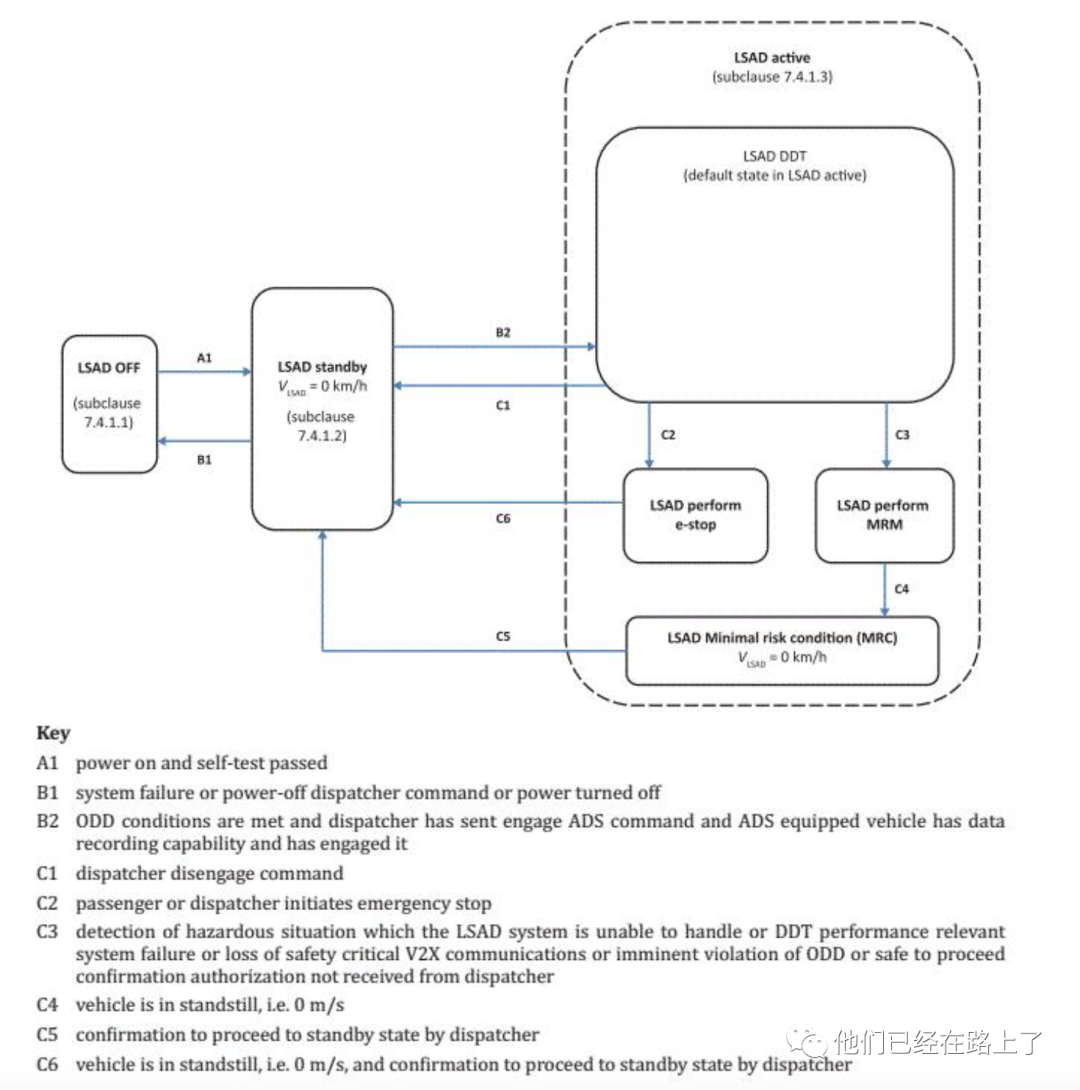
图3:LSAD状态转换图
关键字翻译:
•A1:开机并通过自检 •B1:系统故障或断电 调度员命令或电源关闭 •B2:满足ODD条件,调度员发出参与ADS命令,配备ADS的车辆具有数据记录能力并参与其中。 •C1:调度员解除指令。 •C2:乘客或调度员启动紧急停车。 •C3:检测到LSAD系统无法处理的危险情况或DDT性能相关的系统故障或失去安全关键的V2X通信或即将违反ODD或未收到调度员的安全继续确认授权。 •C4:车辆处于静止状态,即0米/秒。 •C5:调度员确认进入待机状态。 •C6:车辆处于静止状态,即0米/秒,并由调度员确认进入待机状态。
7.4.1 LSAD状态功能描述
7.4.1.1 LASD关闭
在LSAD关闭状态下,LSAD系统不应执行动态驾驶任务的任何内容。
7.4.1.2 LASD待机
在LASD待机状态下,LASD系统应:
a)验证ODD条件是否得到满足,以便能够过渡到LSAD激活状态。
b)进行与调度员的通信。
c)保持静止状态。
LSAD待机状态可以接收来自调度员的外部操作指令,选择LSAD系统在DDT状态时的操作值(例如,正常工作或降级)。 请注意,正常模式表明LSAD系统所驾驶的车辆的理想性能。降级模式表明由于外部或LSAD系统的内部条件,预先定义的车辆参数的性能下降。
7.4.1.3 LASD激活
在LSAD激活状态下,LSAD应执行DDT。LSAD系统的最大运行速度由调度员或系统本身决定。 LSAD激活状态有四个子状态:
1)LSAD DDT子状态:这是LSAD激活状态下的默认子状态。在LSAD DDT子状态内,根据LSAD系统服务提供者的决定,LSAD系统的运行参数可以动态变化。一个LSAD系统在LSAD DDT子状态下有两个基本功能:•执行DDT,包括在避免与障碍物碰撞的同时,安全地沿着预定的路线行驶,以及
•检测即将发生的违反ODD条件的情况。
2)LSAD执行e-stop子状态:如果乘客或调度员要求e-stop,在此状态下,LSAD系统应执行紧急减速,使LSAD系统驾驶的车辆停顿下来,并向调度员提供状态信息,对外传达紧急情况(如通过危险灯、听觉警报)。
3)LSAD执行MRM子状态:如果转换C3的任何一个触发器被满足,LSAD系统应执行最小风险机动(MRM)(子条款8.2)。
4)LSAD MRC子状态:在LSAD MRC状态下,LSAD应:•处于静止状态。
•向调度员提供状态信息。
在所有LSAD活动子状态下,LSAD系统应持续进行系统性能监测。
7.4.2 LSAD的状态转换描述
7.4.2.1 A1
从LSAD关闭状态过渡到LSAD待机状态。
触发条件:
•a)调度员开机命令,以及•b)开机顺序已完成,系统无故障(自检通过)7.4.2.2 B1
从LSAD待机状态过渡到LSAD关闭状态。
触发条件:
•a)检测到一个与DDT性能相关的系统故障,或
•b)调度员关机命令或电源已被关闭。
7.4.2.3 B2
从LSAD待机状态过渡到LSAD激活状态的默认状态(LSAD DDT)。
触发器条件:
•a)LSAD系统满足其ODD条件,且
•b)调度员发送了过渡到LSAD活动状态的指令(调度员参与指令),并且
•c)数据记录器(见10.1)有足够的容量来存储至少一个额外的安全关键事件。
7.4.2.4 C1
从LSAD激活状态的默认状态(LSAD DDT)过渡到LSAD待机状态。
触发器条件:
•a)调度员发出指令,解除LSAD活动状态(调度员解除指令)。
7.4.2.5 C2
从LSAD DDT状态(LSAD主动状态的默认状态)过渡到LSAD执行e-stop状态。
触发条件:
•a)乘客或调度员发起e-stop命令。
7.4.2.6 C3
从LSAD DDT状态过渡到LSAD执行MRM状态。
触发条件:
•a)检测到LSAD系统无法解决的危险情况,或
•b)检测到DDT性能相关的系统故障,或
•c)失去安全关键的V2X通信,或
•d)检测到LSAD系统即将违反ODD条件,或
•e)未收到调度员的安全进行确认授权(见7.4.3.1)。
7.4.2.7 C4
从LSAD执行MRM状态过渡到LSAD MRC状态。
触发条件:
•a)LSAD车辆进入静止状态(即0米/秒)。
7.4.2.8 C5
从LSAD MRC状态过渡到LSAD待机状态。
触发条件:
•a)调度员发送确认,进入待机状态。
7.4.2.9 C6
从LSAD执行e-stop状态过渡到LSAD待机状态。
触发条件:
•a)LSAD车辆速度为0米/秒(即LSAD车辆静止),并且
•b)调度员发送确认,进入待机状态。
7.4.3 LSAD状态图的可能扩展,以适应调度员的输入
7.4.3.1 安全进行的确认请求
这是LSAD DDT状态向调度员(外部实体)提出的请求,以授权LSAD系统所驾驶的车辆在LSAD处于活动模式时,在其可驾驶区域之外暂时前进。它的依据是:
•a)LSAD系统检测到即将超出ODD的情况(对于可驾驶区域),或
•b)可驾驶区域被封锁。
7.4.3.2 安全行驶确认授权
这是调度员在LSAD激活状态下对LSAD系统的输入,以确认继续前进是安全的。 它的依据是:
•a)LSAD DDT状态是否已经要求确认安全进行。
7.4.3.3 运行模式命令
这是调度员在LSAD待机状态下对LSAD系统的输入,用于选择LSAD DDT状态下的运行模式(如:额定或降级)。
7.5 通信要求
根据LSAD系统的实现,安全关键事件数据应在LSAD系统驾驶的车辆和调度员或控制中心之间进行通信。安全关键数据的选择应根据7.3的规定,由相关的利益相关者(如当地政府、服务提供商、制造商等)商定。附件B中描述了一套通信信息的例子。
ISO 22737:2021下载地址:
链接: https://pan.baidu.com/s/1pH98EmlDlQKB4iF7pDlRdQ
提取码: 97vb