
激光雷达原理和分类
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
原文作者:Magical-E
链接:https://zhuanlan.zhihu.com/p/90852852
测距原理
三角测距原理
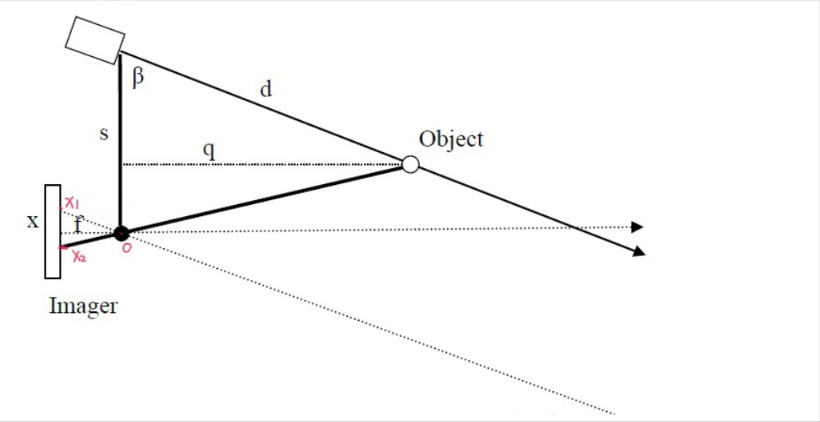
三角测距原理如上图:
激光雷达发射器先发射激光,经过物体(  )反射后被
)反射后被  (一种图像传感器,即图中
(一种图像传感器,即图中  )捕捉,设捕捉点为
)捕捉,设捕捉点为  。现过焦点
。现过焦点  作一条虚线平行于入射光线,交 于
作一条虚线平行于入射光线,交 于  ,由于
,由于  已知,所以可得到 的位置。记
已知,所以可得到 的位置。记  之间距离为
之间距离为  ,易得左右两个三角形相似,所以有:
,易得左右两个三角形相似,所以有:  ,又有
,又有  ,二者联立可得
,二者联立可得  .
.
这样就可得到物体到激光发射器的距离  了,激光雷达将这样的发射器和接收器组装在一起,经过机械旋转360°即可得到一周障碍物的距离。
了,激光雷达将这样的发射器和接收器组装在一起,经过机械旋转360°即可得到一周障碍物的距离。
TOF测距原理
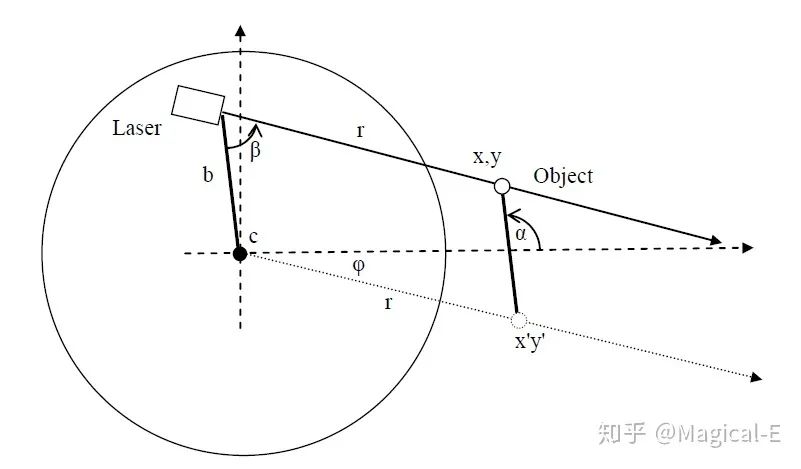
由三角测距的计算公式不难发现,当距离 很大时,每变化  引起的 变化很小,导致精度下降,这就限制了测量范围。
引起的 变化很小,导致精度下降,这就限制了测量范围。
而TOF(Time of flight)原理克服了测量距离这一难点,并且提高了精度:
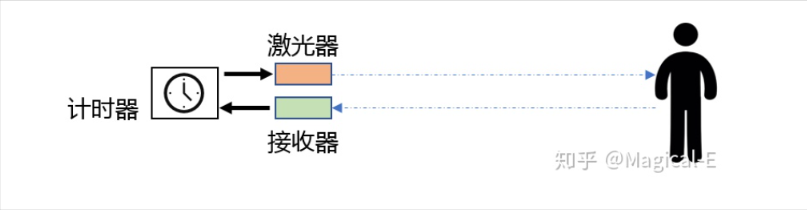
TOF原理十分简单,就是利用光速测距。首先激光发射器发射激光脉冲,计时器记录发射时间;脉冲经物体反射后由接收器接受,计时器记录接受时间;时间差乘上光速即得到距离的两倍。
TOF原理看似简单,但是实现起来确有很多难点:
1. 计时问题:由于光速过快,测量时间会变得很短。据网上数据得:1cm的测量距离对应65ps的时间跨度。这需要计时器的精确度很高。
2. 脉冲问题:发射器需要发射高质量的脉冲光,接收器接受脉冲光的时候需要尽量保持信号不失真。
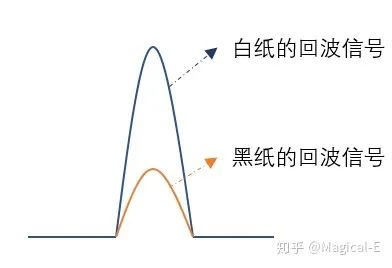
3. 对于同一距离的物体测距时,得到的回波信号可能不一样,如下图的黑白纸,这就需要特殊的处理方式来处理。
雷达分类
机械激光雷达
机械激光雷达使用机械部件旋转来改变发射角度,这样导致体积过大,加工困难,且长时间使用电机损耗较大。但由于机械激光雷达是最早开始研发的,所以现在成本较低,大多数无人驾驶公司使用的都是机械激光雷达。

MEMS激光雷达
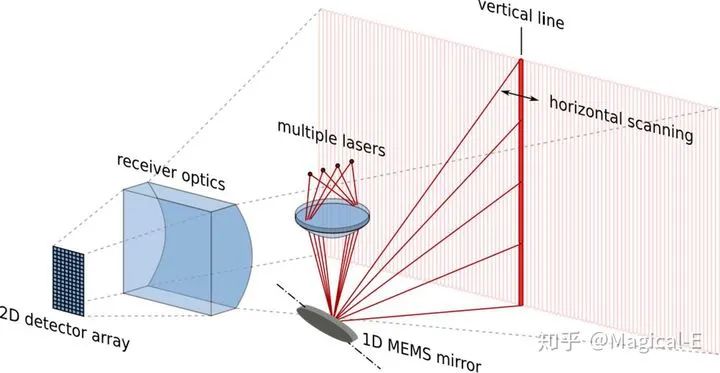
MEMS全称Micro-Electro-Mechanical System,是将原本激光雷达的机械结构通过微电子技术集成到硅基芯片上。本质上而言MEMS激光雷达是一种混合固态激光雷达,并没有做到完全取消机械结构。
主要原理为:通过MEMS把机械结构集成到体积较小的硅基芯片上,并且内部有可旋转的MEMS微振镜,通过微振镜改变单个发射器的发射角度,从而达到不用旋转外部结构就能扫描的效果。
大致原理如下图:
相控阵激光雷达
两列水波干涉时会出现某处高某处低的情形:
光学相控阵原理类似干涉,通过改变发射阵列中每个单元的相位差,合成特定方向的光束。经过这样的控制,光束便可对不同方向进行扫描。雷达精度可以做到毫米级,且顺应了未来激光雷达固态化、小型化以及低成本化的趋势,但难点在于如何把单位时间内测量的点云数据提高以及投入成本巨大等问题。
动态原理图如下:
FLASH激光雷达
FLASH激光雷达原理非常简单:在短时间内发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器,来完成对环境周围图像的绘制。
激光雷达的数据
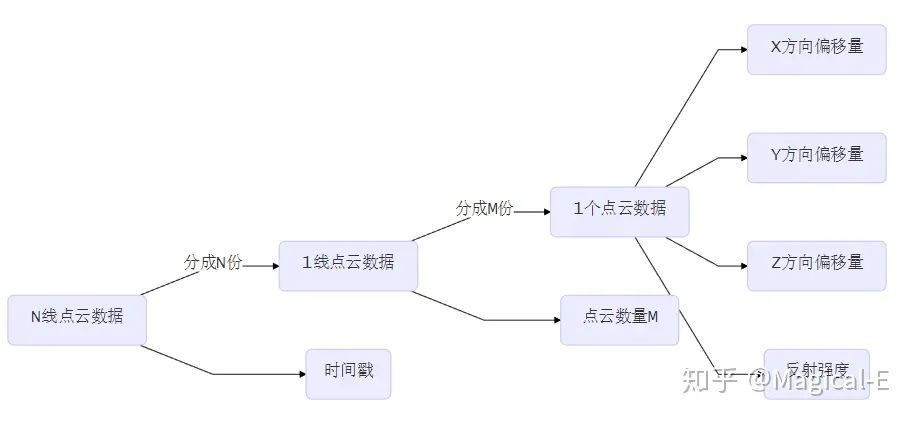
激光雷达数据的处理顺序一般为:
1. 数据预处理(坐标转换,去噪声)
2. 聚类(根据点云距离或反射强度)
3. 提取聚类后的特征,根据特征进行分类等后处理工作。
—版权声明—
仅用于学术分享,版权属于原作者。
若有侵权,请联系微信号:yiyang-sy 删除或修改!