惨烈!特斯拉再次撞上白色卡车,两名乘客急送ICU
极市导读
特斯拉又和白色半挂卡车撞上了!事故造成车上2名人员重伤。场面惨烈,一度导致交通封闭数小时。这么多年过去了,特斯拉为什么还是看不到白色? >>加入极市CV技术交流群,走在计算机视觉的最前沿
特斯拉又撞了!
当地时间周四早上,一辆白色特斯拉Model Y在美国底特律西南部一个十字路口撞上了一辆白色半挂卡车。

场面十分惨烈。现场报道称,特斯拉被卡在了半挂卡车底下,这导致现场很难清理,事发路段也因此交通封闭了几个小时。

警方称,事故发生在凌晨3点30分左右,特斯拉在十字路口撞上卡车时,行驶方向不明。特斯拉两名伤者当即被送往附近医院,目前情况危急。
半挂卡车司机没有受伤。
看不到白色的特斯拉
看不到白色的特斯拉
这已经不是特斯拉第一次与白色卡车相撞了。
2016年,美国佛州的一辆特斯拉Model S在Autopilot状态下与正在转弯的白色半挂卡车发生碰撞,钻进了卡车货柜下方,特斯拉驾驶员不幸身亡。

本来以为这是特斯拉史上第一次自动驾驶致死事故,但是后来发现中国的一起特斯拉Model S撞击道路清扫车的致死事故发生得更早一些。
2019年,依然是佛州,一辆特斯拉Model 3以110公里/小时的时速径直撞向了一辆正在缓慢横穿马路的白色拖挂卡车。据了解,当时这辆Model 3同样处在Autopilot开启的状态下,但驾驶员和Autopilot均未作出规避动作,因此出现了车辆被「切头」的惨案,驾驶员也当场毙命。

2020年6月,台湾高速公路上一辆行驶中的特斯拉Model 3径直撞上已侧翻在路的白色货车。据了解,事发时该车处于Autopilot辅助自动驾驶系统开启状态。由于白色货车内装的是软性材质货物,碰撞时有较大缓冲空间,所以才没有造成伤亡。

特斯拉眼中:白色车箱和天空一色
特斯拉眼中:白色车箱和天空一色
对于这些事故调查结果显示,由于特斯拉的辅助自动驾驶系统错误地把卡车的白色货厢识别成了天空,所以才导致径直撞了上去,而且完全没有减速。
半挂卡车货箱为什么还是白色的,不知道自己对特斯拉是「隐身」的吗。
此前有知乎网友曾拿下面这张图做视觉识别实验。

把白色卡车图片导入Photoshop,采用快速选择工具,试图把白色卡车的轮廓勾选出来,得到的结果是这样的:

有一大片蓝天白云同时被划入了勾选框。在Photoshop来看白色货箱和天空是一样的。
特斯拉辅助自动驾驶视觉识别系统的结果可能也是如此。
看着此次底特律事故图中的白色大货箱,看来这次事故也逃不过这个原因。
特斯拉的辅助自动驾驶系统主要依靠视觉识别。
但是,系统的视觉识别决策却一次又一次犯下致命错误。
多次出现相同原因的事故,不知道这次特斯拉会如何回应?
此前,特斯拉一直强调车主没有保持注意力,官方的调查结论也是特斯拉没有责任。
特斯拉在宣传中总是强调「Autopilot辅助自动驾驶」、「FSD完全自动驾驶」,给用户的错觉是特斯拉可以实现自动驾驶,在特斯拉官网上只有一条不起眼的免责声明:「目前可用的(Autopilot)功能需要驾驶员主动进行监控,车辆尚未实现完全自动驾驶。」
近日,面对美国政府的一再质询,特斯拉终于承认其Autopilot和FSD功能只是驾驶辅助功能。特斯拉的法务副总裁Eric C. Williams在给政府部门的邮件中承认:
「Autopilot和FSD功能都不是自动驾驶系统,无论是单独还是从整体来看,两者都不具备自动驾驶的功能,也不能让我们的车辆实现自动驾驶。」
总之不是特斯拉的错,是地球人的错。
特斯拉不愧是甩锅中的「不粘锅」。
半挂卡车也要改变
半挂卡车也要改变
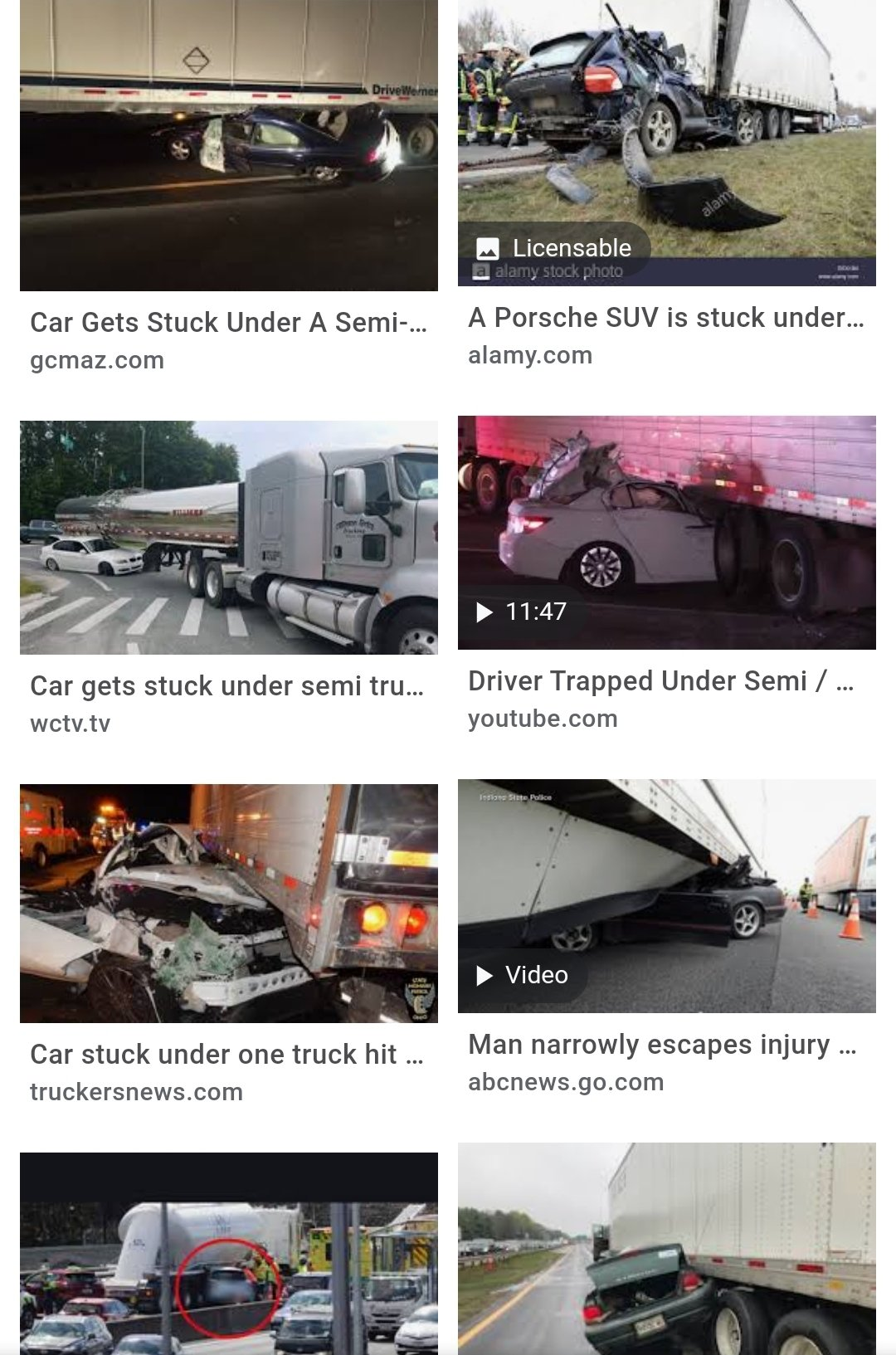
观察这几次特斯拉与半挂卡车的深度亲密接触,都是毫不减速的特斯拉直接冲到了卡车底下。

对此,很多网友都表示,半挂卡车应该在设置上做出改变——在车箱下面加装护栏。

而且这项规定并不是针对特斯拉,比如德国,在特斯拉进入德国之前就已经有这项规定了。
毕竟,特斯拉这样的事故并不是唯一,其他传统轿车发生的此类事故也不少。
但是细心网友也发现了,在这次底特律的特斯拉事故中,半挂卡车是安装了防护板的。

但似乎,防护板太过柔软,而且安装长度也不足以覆盖整个车箱,还是让高速行驶中的特斯拉「钻了空子」。
不管特斯拉未来如果回应或作出改进,这条建议都是很有必要的。
车厢涂上「STOP」的字样?这样的话,特斯拉的视觉识别至少能看到点什么吧?
自动驾驶的未来,是激光雷达还是视觉识别?
半挂卡车的改变只是尽可能将伤害降低,主要问题还在于特斯拉的自动驾驶系统。
在马斯克眼中,激光雷达是一种落后的东西,他在2019年4月曾经说过:“激光雷达和高精度地图都是自动驾驶中错误的解决方案, 只会减慢自动驾驶商业化的速度。如果你只是在限制区域行驶, 那也不能叫做自动驾驶。”
与之相对的,目前丰田,福特,通用汽车这些传统汽车大厂都押宝在激光雷达上,它是明确的信息,与视觉上的预测是完全不同的两个路线。
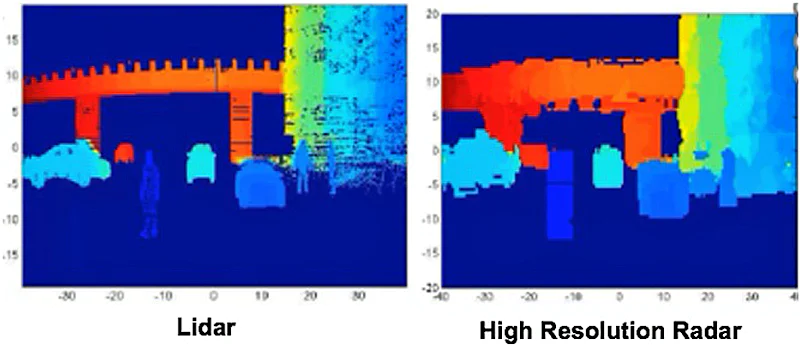
激光雷达是通过主动探测的方式进行大范围的扫描,而且由于激光光束更加聚拢,精度上比摄像机加毫米波雷达的组合要更高。
激光雷达的主要缺点就是又大、又笨重、又丑陋,而特斯拉只需要装一个小摄像头和几个毫米波雷达。

目前主流观点认为,激光雷达测量最为精准,而特斯拉的计算机视觉识别则精度尚稍欠缺。
在自动驾驶没有普及之前,还是好好学习开车吧!

参考资料:
https://www.huxiu.com/article/360888.html
https://www.radio.com/wwjnewsradio/news/local/tesla-crushed-underneath-semi-in-southwest-detroit-crash
https://zx.sina.cn/abc/middle1.d.html?type=auto&link=http%3A%2F%2Fauto.sina.cn%2Fzz%2Fhy%2F2021-03-12%2Fdetail-ikkntiak9384657.d.html%3Fsinawapsharesource%3Dnewsapp&wm=3200_0002
推荐阅读
2021-03-14
2021-03-14
2021-03-14


# CV技术社群邀请函 #
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~