
AutowareAuto 泊车案例复现及原理简介
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
前提准备
AutowareAuto ade环境搭建完成
Lgsvl环境和仿真器配置完成
运行环境建议
如果运行 LGSVL 仿真器,需要搭载 NVIDIA 显卡,具体要求如链接所示,推荐配置如下
Intel(R) Core(TM) i9-9900KF CPU @ 3.60GHz (16 virtual cores) with 64GB RAM
NVIDIA GeForce RTX 2080 with 8 GB memory
如果运行失败或者效果差,可能是计算资源不足造成。
启动
终端一:启动仿真器
ade --rc .aderc-amd64-foxy-lgsvl start --update --enter/opt/lgsvl/simulator &
终端二:启动可视化界面
ade entersource /opt/AutowareAuto/setup.bashros2 launch autoware_auto_launch autoware_auto_visualization.launch.py
终端三:
ade entersource /opt/AutowareAuto/setup.bashros2 launch autoware_demos avp_sim.launch.py
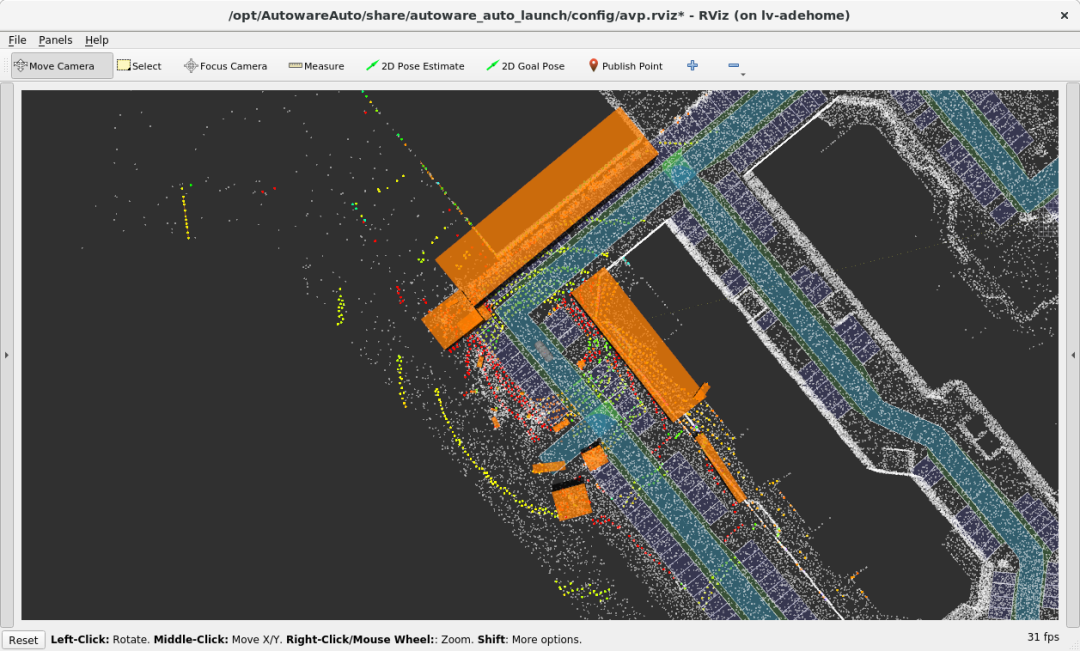
这个时候,即可看到如图界面
具体流程介绍
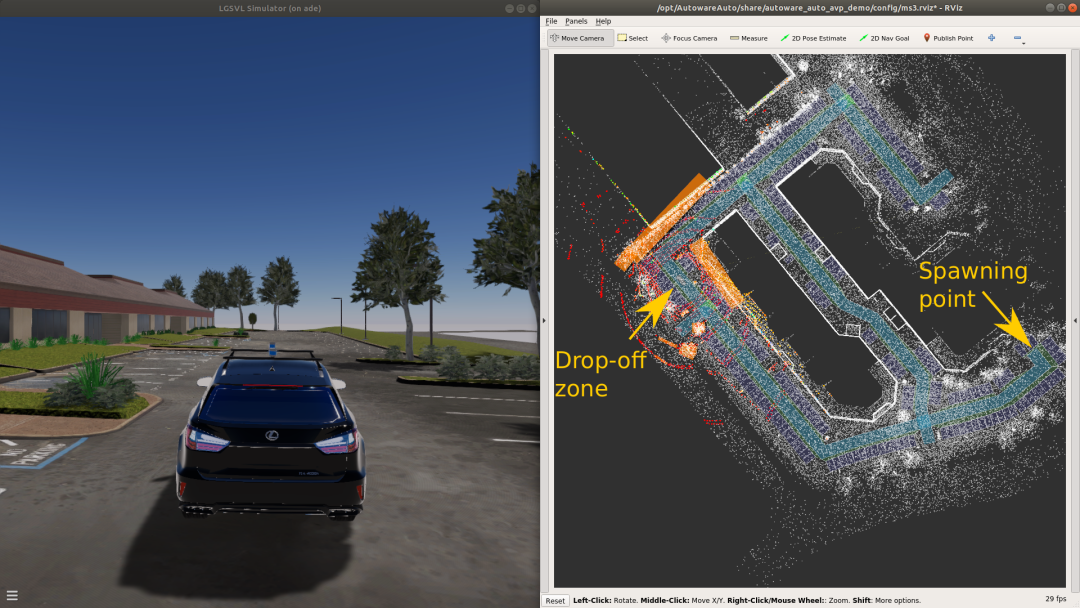
1、设定初始位姿与定位简介
使用2D Pose Estimate指令给车辆设定初始位置。如下图所示

此时,车辆便和LGSVL中位置达成一直一致,如果位置不一致,导航将会失败。
AutowareAuto的定位是如何实现的呢?
首先,需要给定车辆一个初始位姿,这个姿态对于车辆而言就是一个绝对位置,相当于GPS位置,至于为什么不使用GPS定位,在定位一栏中会专门介绍。
在初始位姿给定后,NDT算法会对现有为位姿做一个微调,这里其实就是采用点云信息的匹配做到的。
在之后导航的过程中,NDT算法会一直作用与车辆身上,帮助车辆时刻保持定位准确。
2、导航与内部算法简介
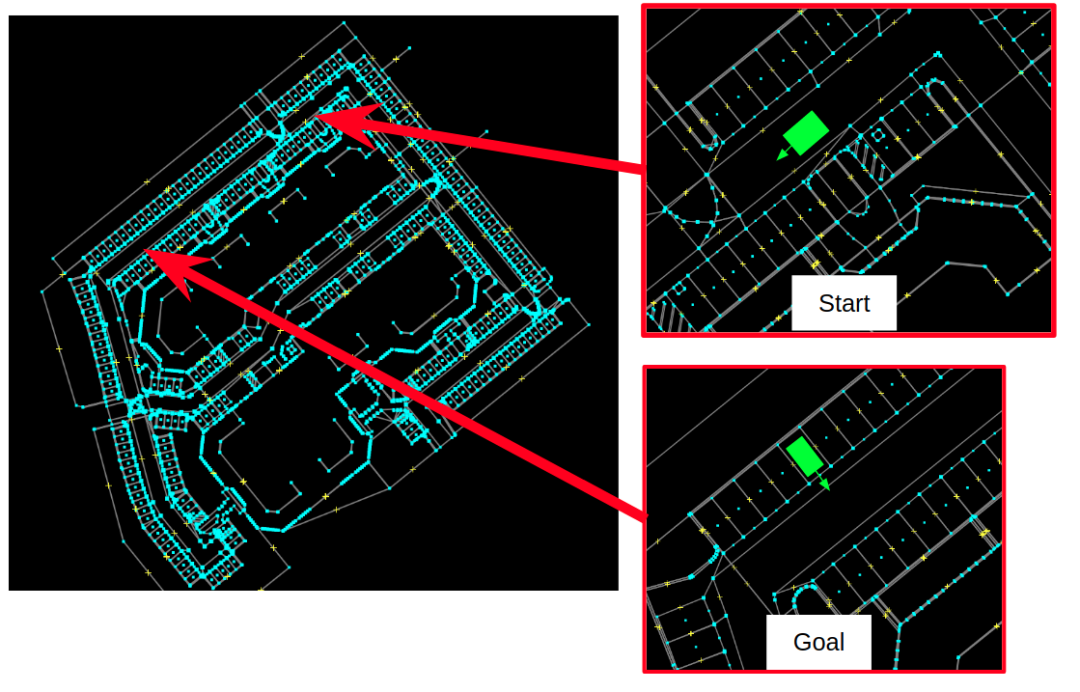
定位结束后,AutowareAuto对于车辆的移动采用定点移动,即利用 2D Nav Goal 插件对车辆发布目标点。如下图所示
此时,车辆将会朝着目标点行使。
AutowareAuto的决策规划是如何实现的呢?
这里首先得讲到AutowareAuto背后的一个逻辑,那就是如何判断某个位置是否是可行区域。其实这就是正式驾驶的前提条件,地图构建。
AutowareAuto的地图构建分为两个部分,一部分为点云地图,一部分为语义地图。点云地图将地图中障碍物信息采集,语义地图则根据点云地图画出。
所以,AutowareAuto规划的一个基础为地图,从地图中可行区域中规划出一条从当前位置到目标位置的路径。
3、泊车案例及其内部算法
从导航原理可知,泊车无非也是从语义地图中读出,哪一些地方属于可停车区域,如下图所示
可是,我们虽然直到了其中的一个本质。可是它具体是如何实现的呢?
从泊车案例思考,其内部的一个算法为混合 A* (Hybrid A*)。混合A*算法是斯坦福大学于2010年提出用于解决在侧方位停车和倒车入库过程中的路径规划问题。
其背后的原理其实和A*算法一致,不同的是,其中加入了车辆运动学模型。
伪代码为:
ASTAR(){INIT STARTINIT ENDINIT_VEC OPENSETINIT_VEC FATHERSETINIT_VEC OBSTACLEOPENSET.ADD(START)ADD_OPENSET(START)WHILE(!IS_OPENSET_EMPTY()){MIN_FN_POINT = FIND_MIN_FN(OPENSET)IF(MIN_FN_POINT == END){BREAK}SEARCH_ENV_BLOCK(MIN_FN_POINT)OPENSET.DELETE(MIN_FN_POINT)FATHERSET.ADD(MIN_FN_POINT)}GET_TRAJECTORY()}SEARCH_ENV_BLOCK(MIN_FN_POINT){FOR(AUTO_P : MIN_FN_POINT){COST = MIN_FN_POINT.G + CALCU_G(MIN_FN_POINT, AUTO_P)IF((AUTO_P IN FATHERSET) || (AUTO_P IN OBSTACLE)){CONTINUE}IF(AUTO_P NOT IN OPENSET){OPENSET.ADD(AUTO)}ELSE IF(AUTO_P.G > COST){UPDATE AUTO_P}}}
泊车最后实现如图:
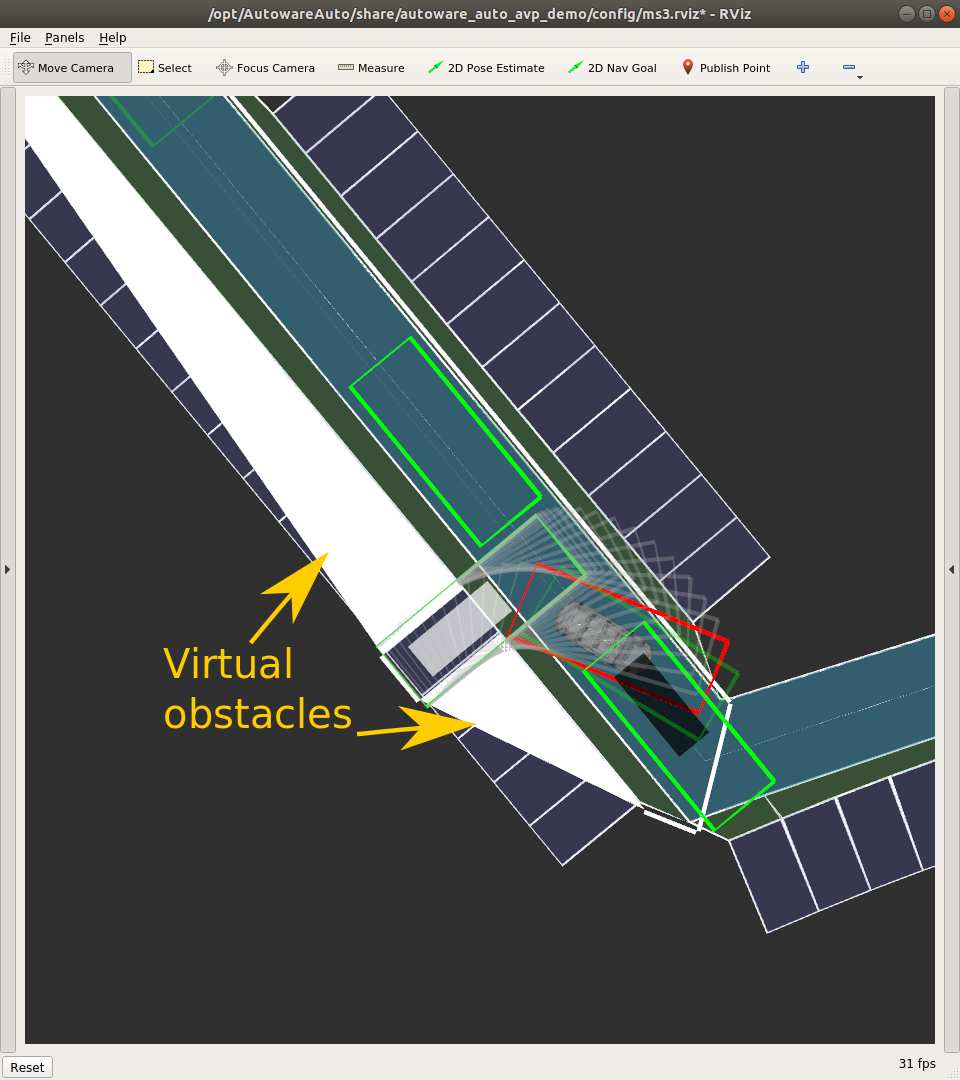
注:一旦自动驾驶,手动驾驶将不再起作用,因为车辆会激活制动器以保持在先前定义的目标位置
重要事项
在之前的操作中,我们都是在 docker ade 环境下执行的 /opt/AutowareAuto 目录下的代码,当读者选择通过自行编译的代码,也就是 /home/${USER}/AutowareAuto 下代码执行上述操作时,会出现车辆不出现,点云地图不出现的情况,在此解释:
地图和车辆都是基于 /opt/AutowareAuto 下配置进行的,如果想要用 AutowareAuto 内配置,需要将点云地图和车辆都换成下载代码中的配置
vehicle_characteristics_param_file = os.path.join(get_package_share_directory('autoware_demos'), 'param/vehicle_characteristics.param.yaml')vehicle_constants_manager_param_file = os.path.join(get_package_share_directory('autoware_auto_launch'), 'param/lexus_rx_hybrid_2016.param.yaml')
同理,之后如果想要更换地图或者更换车辆配置,都需要在launch中作详细目录说明,不然都会指到 /opt 中。
在修改后都需要用 colcon build --packages-select 功能包 来重新编译。
问题与解答
1.车辆在模拟器中没有改变,但是在rviz2中显示十分奇怪,比如卡在某一个位置或者定位不准确
原因:计算资源不够
2.出现如下所示报错:
[object_collision_estimator_node_exe-18] [WARN] [1613130016.283356960] [planning.object_collision_estimator_node]: on_bounding_box cannot transform base_link to map.[behavior_planner_node_exe-19] [INFO] [1613130016.285522103] [planning.behavior_planner_node]: Waiting for localization result to become available[lanelet2_global_planner_node_exe-15] [ERROR] [1613130016.285673175] [planning.lanelet2_global_planner_node]: Failed to transform Pose to map frame[behavior_planner_node_exe-19] [INFO] [1613130016.320455277] [planning.behavior_planner_node]: Waiting for localization result to become available[lanelet2_global_planner_node_exe-15] [ERROR] [1613130016.321167460] [planning.lanelet2_global_planner_node]: Failed to transform Pose to map frame[p2d_ndt_localizer_exe-4] [ERROR] [1613130016.337780380] [localization.p2d_ndt_localizer_node]: Could not find a connection between 'map' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
3.解决方法:重新给定一个绝对坐标
[lanelet2_global_planner_node_exe-15] [ERROR] [planning.lanelet2_global_planner_node]: Global route has not been found!原因:全局路径规划器规划失败,一方面可能是性能原因,一方面可能是车辆本身机制不允许,比如位置在车身之后。
本文仅做学术分享,如有侵权,请联系删文。