ECCV 2020论文大盘点-3D目标检测篇
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
随着自动驾驶的火热,3D目标检测在计算机视觉领域持续升温,学术和工业界都有众多研究学者,这其中基于点云数据的3D目标检测是主流,近年来基于单目RGB数据的也越来越多了。本部分总计 21 篇,1篇spotlight,8篇开源。
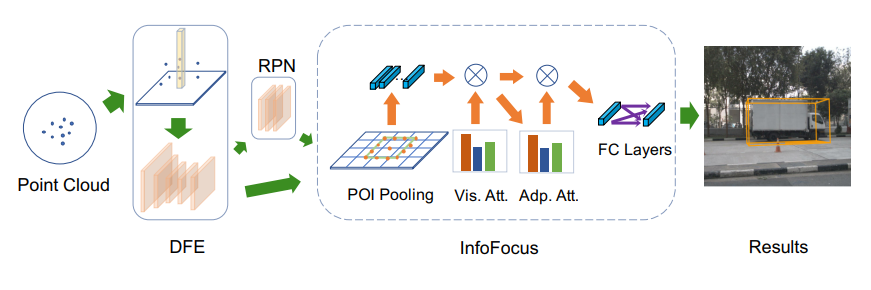
动态信息建模的3D目标检测。
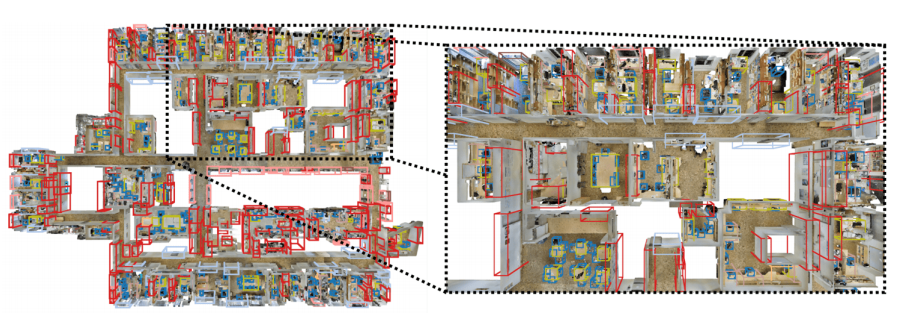
[3].H3DNet: 3D Object Detection Using Hybrid Geometric Primitives
作者 | Zaiwei Zhang, Bo Sun, Haitao Yang, Qixing Huang
单位 | 得克萨斯大学奥斯汀分校
论文 | https://arxiv.org/abs/2006.05682
代码 | https://github.com/zaiweizhang/H3DNet
弱监督学习+雷达点云
[4].Weakly Supervised 3D Object Detection from Lidar Point Cloud
作者 | Qinghao Meng, Wenguan Wang, Tianfei Zhou, Jianbing Shen, Luc Van Gool, Dengxin Dai
单位 | 北京理工大学;苏黎世联邦理工学院;IIAI
论文 | https://arxiv.org/abs/2007.11901
代码 | https://github.com/hlesmqh/WS3D

[5].3D-CVF: Generating Joint Camera and LiDAR Features Using Cross-View Spatial Feature Fusion for 3D Object Detection
作者 | Jin Hyeok Yoo, Yecheol Kim, Jisong Kim, Jun Won Choi
单位 | 汉阳大学
联合激光雷达与RGB数据的跨视图空间特征融合的3D目标检测。

3D目标检测+3D点云
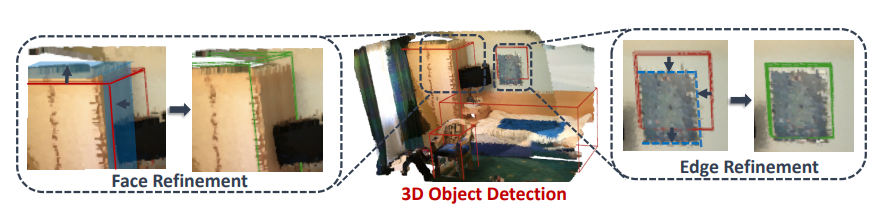
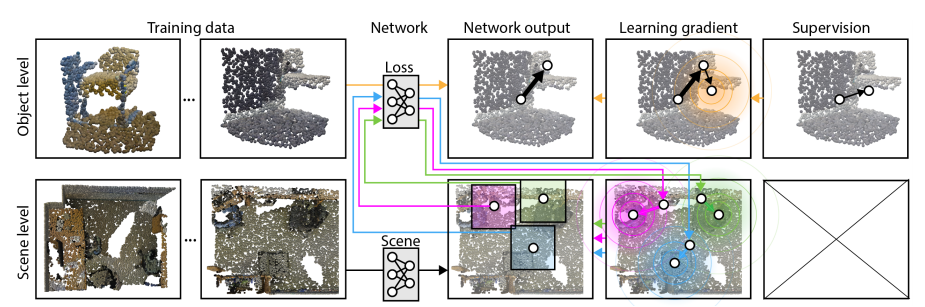
[6].Finding Your (3D) Center: 3D Object Detection Using a Learned Loss
作者 | David Griffiths, Jan Boehm, Tobias Ritschel
单位 | 伦敦大学学院
论文 | https://arxiv.org/abs/2004.02693
代码 | https://github.com/dgriffiths3/finding-your-center
3D目标检测+点云+LSTM
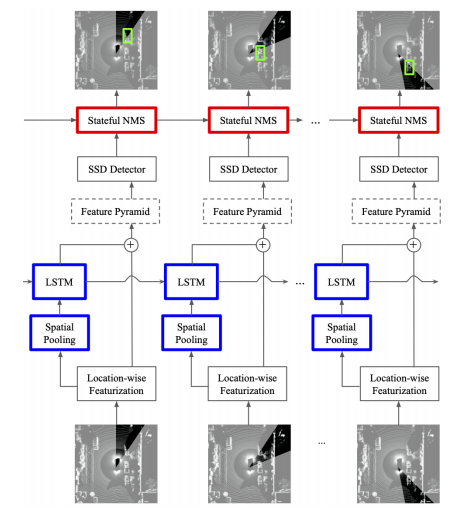
[7].An LSTM Approach to Temporal 3D Object Detection in LiDAR Point Clouds
作者 | Rui Huang, Wanyue Zhang, Abhijit Kundu, Caroline Pantofaru, David A Ross, Thomas Funkhouser, Alireza Fathi
单位 | 谷歌
论文 | https://arxiv.org/abs/2007.12392
主页 | https://sites.google.com/view/lstm-3d-detection/home
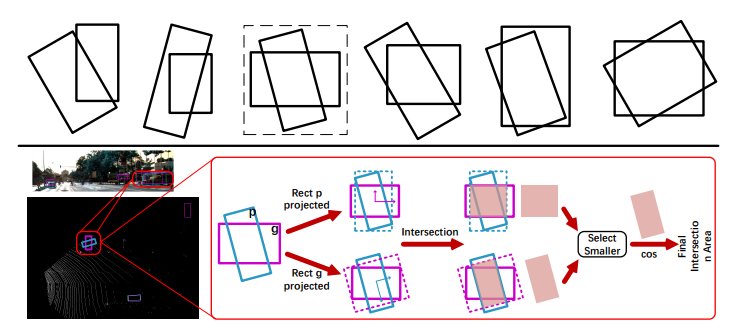
[8].Rotation-robust Intersection over Union for 3D Object Detection
作者 | Yu Zheng , Danyang Zhang, Sinan Xie , Jiwen Lu , Jie Zhou
单位 | 清华大学
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123650460.pdf
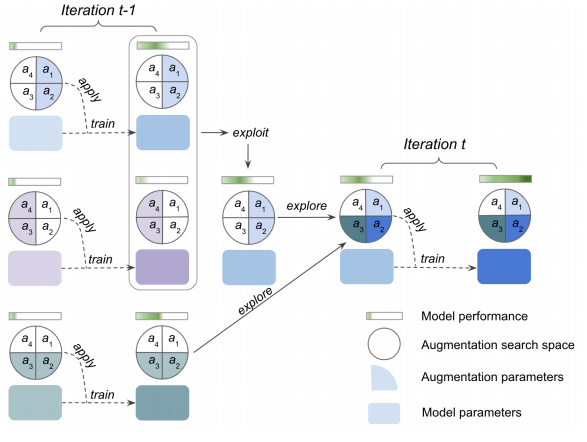
[9].Improving 3D Object Detection through Progressive Population Based Augmentation
作者 | Shuyang Cheng, Zhaoqi Leng, Ekin Dogus Cubuk, Barret Zoph, Chunyan Bai, Jiquan Ngiam, Yang Song, Benjamin Caine, Vijay Vasudevan, Congcong Li, Quoc V. Le, Jonathon Shlens, Dragomir Anguelov
单位 | Waymo LLC;谷歌
论文 | https://arxiv.org/abs/2004.00831
点云中3D目标检测的数据增广。

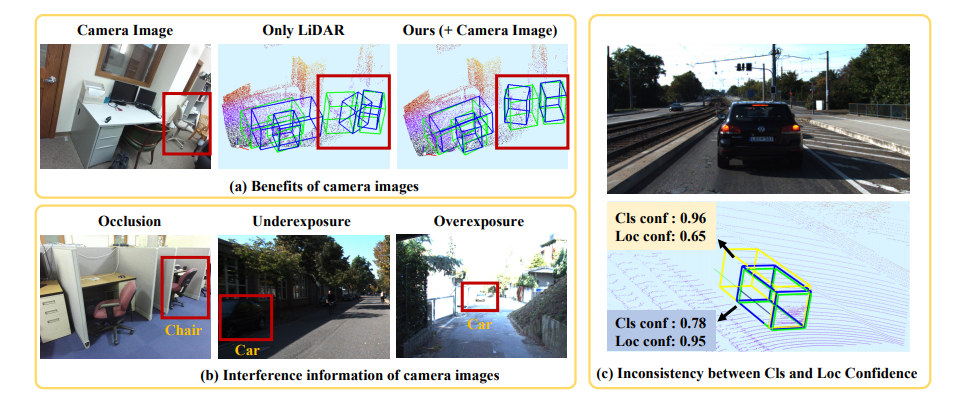
[11].EPNet: Enhancing Point Features with Image Semantics for 3D Object Detection
作者 | Tengteng Huang, Zhe Liu, Xiwu Chen, Xiang Bai
单位 | 华中科技大学
论文 | https://arxiv.org/abs/2007.08856
代码 | https://github.com/happinesslz/EPNet
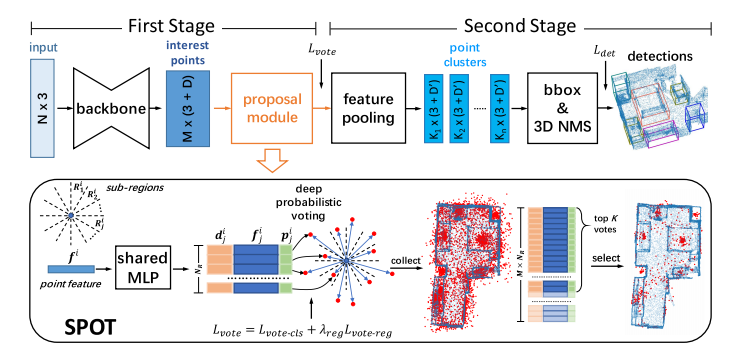
[12].SPOT: Selective Point Cloud Voting for Better Proposal in Point Cloud Object Detection
作者 | Hongyuan Du, Linjun Li, Bo Liu, and Nuno Vasconcelos
单位 | 加利福尼亚大学圣迭戈分校
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123560222.pdf
[13].Streaming Object Detection for 3-D Point Clouds
作者 | Wei Han, Zhengdong Zhang, Benjamin Caine, Brandon Yang, Christoph Sprunk, Ouais Alsharif, Jiquan Ngiam, Vijay Vasudevan, Jonathon Shlens, Zhifeng Chen
单位 | 谷歌等
论文 | https://arxiv.org/abs/2005.01864
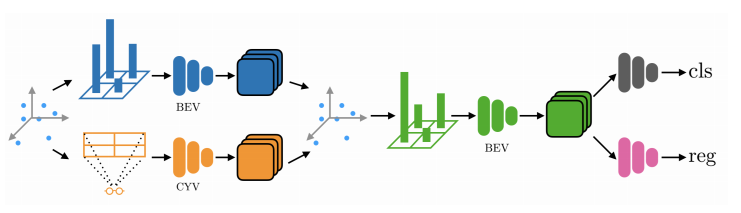
[14].Pillar-based Object Detection for Autonomous Driving
作者 | Yue Wang, Alireza Fathi, Abhijit Kundu, David Ross, Caroline Pantofaru, Thomas Funkhouser, Justin Solomon
单位 | 麻省理工学院;谷歌
论文 | https://arxiv.org/abs/2007.10323
代码 | https://github.com/WangYueFt/pillar-od
备注 | ECCV 2020
[15].SSN: Shape Signature Networks for Multi-class Object Detection from Point Clouds
作者 | Xinge Zhu Yuexin Ma Tai Wang Yan Xu Jianping Shi Dahua Lin
单位 | 香港中文大学;商汤科技;香港浸会大学
论文 | https://arxiv.org/abs/2004.02774
代码 | https://github.com/xinge008/SSN(尚未开源)
单目 3D 目标检测
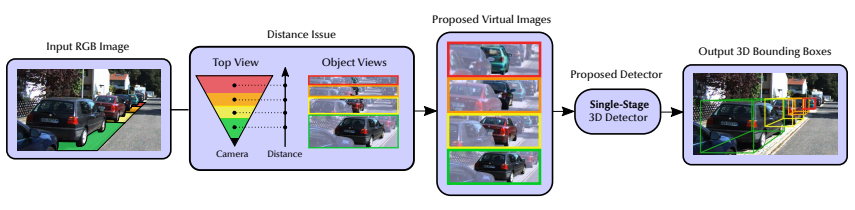
[16].Distance-Normalized Unified Representation for Monocular 3D Object Detection
作者 | Xuepeng Shi, Zhixiang Chen, Tae-Kyun Kim
单位 | 帝国理工学院 韩国科学技术院
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123740086.pdf
[17].Reinforced Axial Refinement Network for Monocular 3D Object Detection
作者 | Lijie Liu , Chufan Wu , Jiwen Lu , Lingxi Xie , Jie Zhou , and Qi Tian
单位 | 清华大学;华为
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123620528.pdf

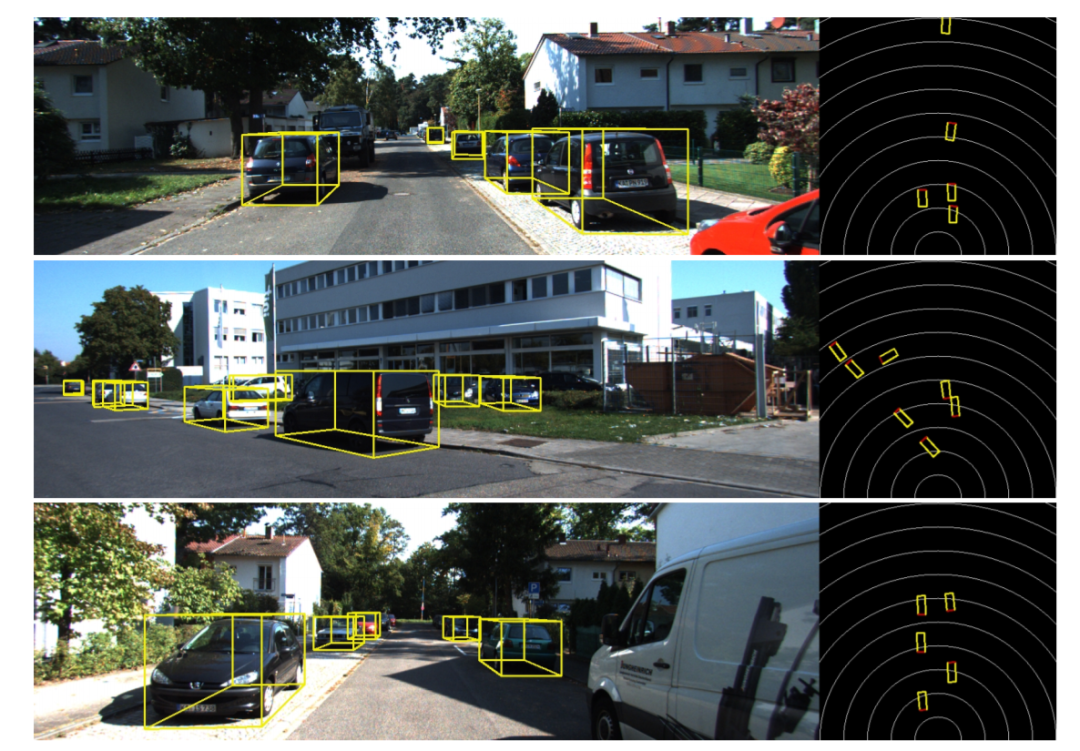
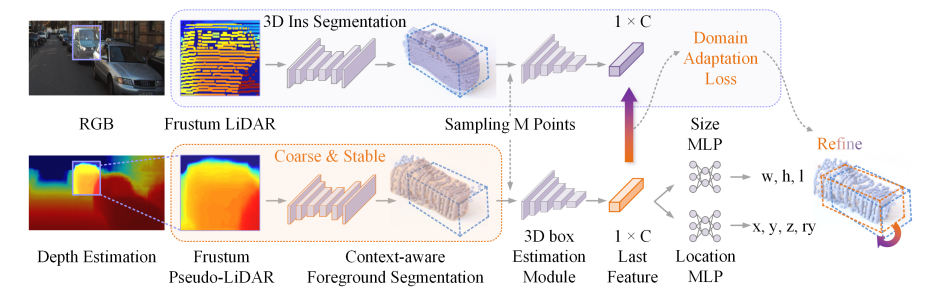
[18].Monocular 3D Object Detection via Feature Domain Adaptation
作者 | Xiaoqing Ye, Liang Du, Yifeng Shi, Yingying Li, Xiao Tan, Jianfeng Feng , Errui Ding , Shilei Wen
单位 | 百度;复旦大学
论文 | https://www.ecva.net/papers/eccv_2020/papers
_ECCV/papers/123540018.pdf
[19].Monocular Differentiable Rendering for Self-Supervised 3D Object Detection
作者 | Deniz Beker, Hiroharu Kato, Mihai Adrian Morariu, Takahiro Ando, Toru Matsuoka, Wadim Kehl, Adrien Gaidon
单位 | Preferred Networks, Inc; 丰田研究所
论文 | https://www.ecva.net/papers/eccv_2020/
papers_ECCV/papers/123660511.pdf

[20].Kinematic 3D Object Detection in Monocular Video
作者 | Garrick Brazil, Gerard Pons-Moll, Xiaoming Liu, Bernt Schiele
单位 | 密歇根州立大学;萨尔大学
论文 | https://arxiv.org/abs/2007.09548
代码 | https://github.com/garrickbrazil/kinematic3d
主页 | http://cvlab.cse.msu.edu/project-kinematic.html
[21].Towards Generalization Across Depth for Monocular 3D Object Detection
作者 | Andrea Simonelli, Samuel Rota Buló, Lorenzo Porzi, Elisa Ricci, Peter Kontschieder
单位 | Mapillary Research;University of Trento;Fondazione Bruno Kessler
论文 | https://arxiv.org/abs/1912.08035