
贝叶斯深度学习最新研究总结
导读
本篇文章主要概括了关于贝叶斯深度学习最新研究(2020)的survey:A Survey on Bayesian Deep Learning。内容包括贝叶斯深度学习的基本介绍以及其在推荐系统,话题模型,控制等领域的应用。
一个综合的人工智能系统应该不止能“感知”环境,还要能“推断”关系及其不确定性。深度学习在各类感知的任务中表现很不错,如图像识别,语音识别。然而概率图模型更适用于inference的工作。这篇survey提供了贝叶斯深度学习(Bayesian Deep Learning, BDL)的基本介绍以及其在推荐系统,话题模型,控制等领域的应用。
本文的目录如下:
1 Introduction
2 Deep Learning
2.2 AutoEncoders 3 Probabilistic Graphical Models
4 Bayesian Deep Learning
4.1 A Brief History of Bayesian Neural Networks and Bayesian Deep Learning 4.2 General Framework 4.3 Perception Component 4.4 Task-Specific Component 5 Concrete BDL Models and Applications
5.1 Supervised Bayesian Deep Learning for Recommender Systems 5.2 Unsupervised Bayesian Deep Learning for Topic Models 5.3 Bayesian Deep Representation Learning for Control 5.4 Bayesian Deep Learning for Other Applications 6 Conclusions and Future Research
1 Introduction
基于深度学习的人工智能模型往往精于 “感知” 的任务,然而光有感知是不够的,“推理” 是更高阶人工智能的重要组成部分。比方说医生诊断,除了需要通过图像和音频等感知病人的症状,还应该能够推断症状与表征的关系,推断各种病症的概率,也就是说,需要有“thinking”的这种能力。具体而言就是识别条件依赖关系、因果推断、逻辑推理、处理不确定性等。
概率图模型(PGM)能够很好处理概率性推理问题,然而PGM的弊端在于难以应付大规模高维数据,比如图像,文本等。因此,这篇文章尝试将二者结合,融合到DBL的框架之中。
比如说在电影推荐系统中,深度学习适于处理高维数据,比如影评(文本)或者海报(图像);而概率图模型适于对条件依赖关系建模,比如观众和电影之间的网络关系。
从uncertainty的角度考虑,BDL适合于去处理这样的复杂任务。复杂任务的参数不确定性一般有如下几种:(1)神经网络的参数不确定性;(2)与任务相关的参数不确定性;(3)perception部分和task-specific部分信息传递的不确定性。通过将未知参数用概率分布而不是点估计的方式表示,能够很方便地将这三种uncertainty统一起来处理(这就是BDL框架想要做的事情)。
另外BDL还有 “隐式的”正则化作用,在数据缺少的时候能够避免过拟合。通常BDL由两部分组成:perception模块和task-specific模块。前者可以通过权值衰减或者dropout正则化(这些方法拥有贝叶斯解释),后者由于可以加入先验,在数据缺少时也能较好地进行建模。
当然,BDL在实际应用中也存在着挑战,比如时间复杂性的问题,以及两个模块间信息传递的有效性。
2 Deep Learning
这一章主要介绍经典的深度学习方法,这里不用过多的篇幅去叙述,文章中提到的方法包括MLP、AutoEncoder、CNN、RNN等。
2.2 AutoEncoders
这一部分提一下自编码器。这是一种能将输入编码为更紧凑表示的神经网络,同时能够将这种紧凑表示进行重建。这方面的资料也很多,这里主要说明一下AE的变种——SDAE(Stacked Denoising AutoEncoders)
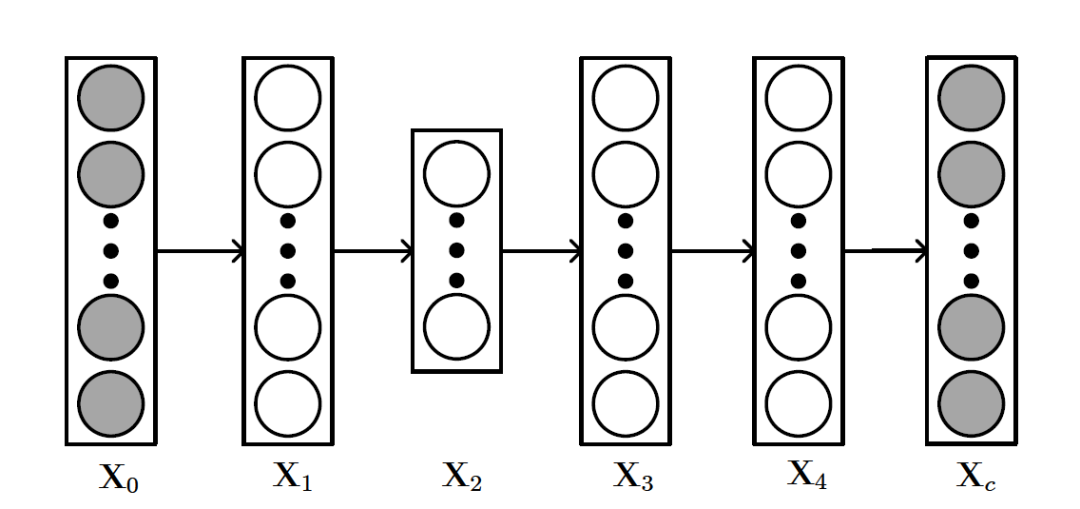
SDAE的结构如上图所示,和AE不同的是, 可以看做输入数据
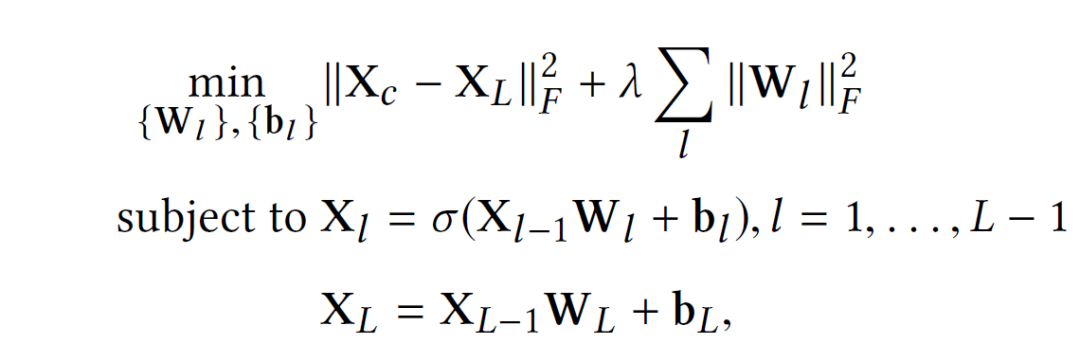
可以看做输入数据 加入噪声或者做了一些随机处理后的结果(比如可以把中的数据随机选30%变为零)。所以SDAE做的就是试图把处理过的corrupted data恢复成clean data。SDAE可以转化为如下优化问题:
加入噪声或者做了一些随机处理后的结果(比如可以把中的数据随机选30%变为零)。所以SDAE做的就是试图把处理过的corrupted data恢复成clean data。SDAE可以转化为如下优化问题:
3 Probabilistic Graphical Model
这一章主要介绍概率图模型,也是为后面的内容做知识铺垫的,概率图模型的相关资料有不少,因此这里不过多叙述。文章主要介绍的是有向贝叶斯网(Bayesian Networks),如LDA等模型。LDA可以拓展出更多的topic model,如推荐系统中的协同话题回归(CTR)。
4 Bayesian Deep Learning
在这个部分,作者列举了一些BDL模型在推荐、控制等领域的应用,我们可以看到,众多当前实用的模型都可以统一到BDL这个大框架之下:
4.1 A Brief History of Bayesian Neural Networks and Bayesian Deep Learning
和BDL很相似的是BNN(Bayesian neural networks),这是一个相当古老的课题,然而BNN只是本文BDL框架下的一个子集——BNN相当于只有perception部分的BDL。
4.2 General Framework
如下图是文章提出的基本框架,红色部分是感知模块,蓝色部分是任务模块。红色部分通常使用各种概率式的神经网络模型,而蓝色部分可以是贝叶斯网络,DBN,甚至是随机过程,这些模型会以概率图的形式表示出来。
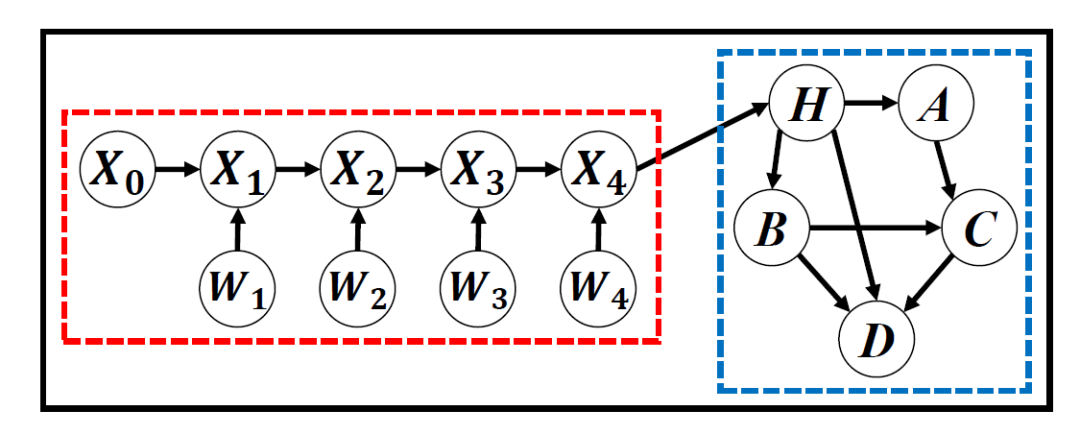
在这个基本框架中往往有三种变量:perception variables  (图中的X,W), hinge variables
(图中的X,W), hinge variables  (图中的H)和task variables
(图中的H)和task variables  (图中的A,B,C)。通常来说,红色模块和hinge variables之间的连接是独立的。因此,对于能归纳到BDL框架下的模型,我们都可以找到这样的结构——两个模块,三种变量。
(图中的A,B,C)。通常来说,红色模块和hinge variables之间的连接是独立的。因此,对于能归纳到BDL框架下的模型,我们都可以找到这样的结构——两个模块,三种变量。
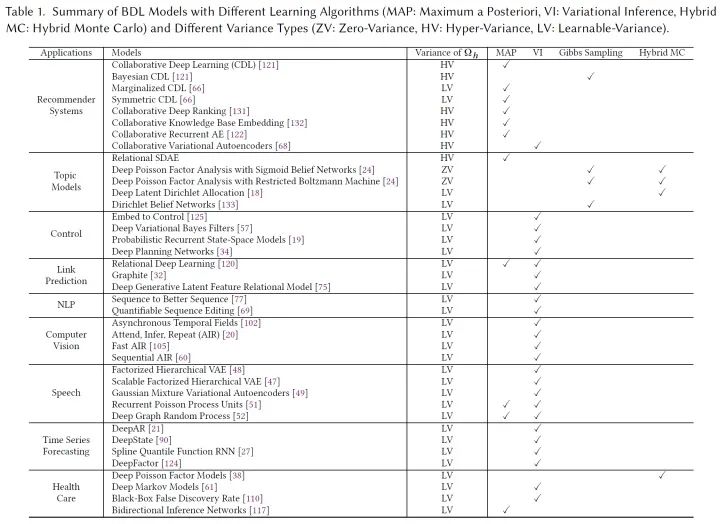
BDL可以对红蓝两个部分之间信息交换的uncertainty进行建模,这个问题等价研究的uncertainty(在公式中的体现就是条件方差)。方差的不同假设有:Zero-Variance(ZV,没有不确定性,方差为零),Hyper-Variance(HV,方差大小由超参数决定),Learnable Variance(LV,使用可学习参数表示)。显然,灵活性上有LV>HV>ZV。
4.3 Perception Component
通常来说,这一部分应该采用BNN等模型,当然我们可以使用一些更加灵活的模型,比如RBM,VAE,以及近来比较火的GAN等。文章提到了以下几个例子:
Restricted Boltzman Machine:RBM是一种特殊的BNN,主要特点有:(1)训练时不需要反向传播的过程;(2)隐神经元是binary的。RBM的具体结构如下:
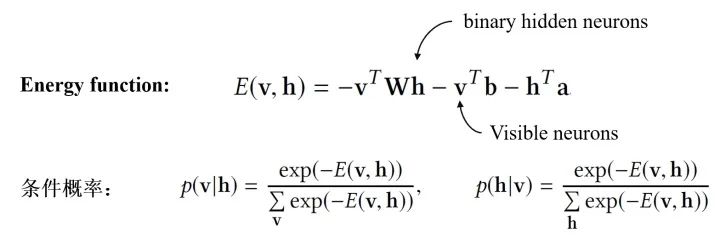
RBM通过Contrastive Divergence进行训练(而不是反向传播),训练结束后通过边缘化其他neurons就能求出
 和
和 。和corrupted input 都是可以观察的,便可以定义如下的Probabilistic SDAE:
。和corrupted input 都是可以观察的,便可以定义如下的Probabilistic SDAE: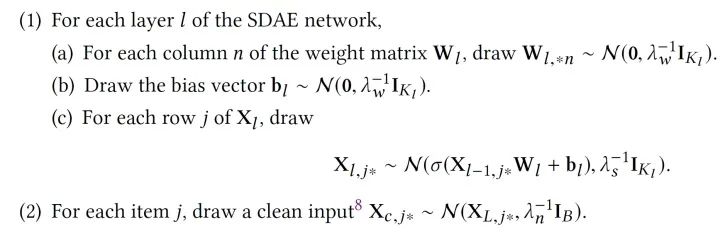
Variational Autoencoders:VAE的基本想法就是通过学习参数最大化ELBO,VAE也有诸多变种,比如IWAE(Importance weighted Autoencoders),Variational RNN等。
Natural-Parameter Networks:与确定性输入的vanilla NN不同,NPN将一个分布作为输入(和VAE只有中间层的output是分布不同)。当然除了高斯分布,其他指数族也可也当做NPN的输入,如Gamma、泊松等。
4.4 Task-Specific Component
这一个模块的主要目的是将概率先验融合进BDL模型中(很自然的我们可以用PGM来表示),这个模块可以是Bayesian Network,双向推断网络,甚至是随机过程。
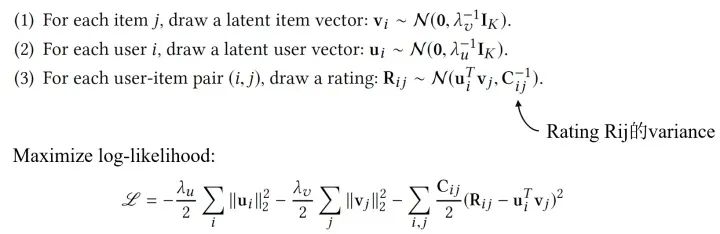
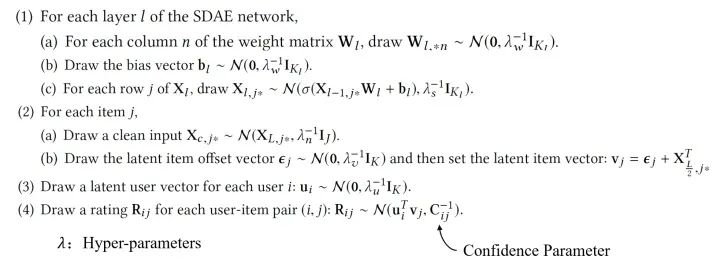
Bayesian Networks:贝叶斯网是最常见的task-specific component。除了LDA,另一个例子是PMF(Probabilistic Matrix Factorization),原理是使用BN去对users,items和评分的条件依赖性建模。以下是PMF假设的生成过程:
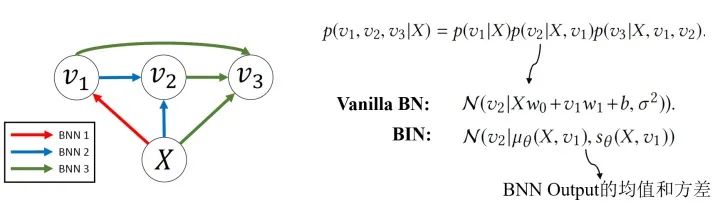
Bidirectional Inference Networks:Deep Bayesian Network不止关注“浅相关”和线性结构,还会关注随机变量的非线性相关和模型的非线性结构。BIN是其中的一个例子。
Stochastic Processes:随机过程也可以作为Task-component,比如说用维纳过程模拟离散布朗运动,用泊松过程模拟处理语音识别的任务等。随机过程可以被看做一种动态贝叶斯网(DBN)。
5 Concerte BDL Models and Applications
上一章讨论完构成BDL的基本模型结构,我们自然希望能够把这一套大一统的框架运用在一些实际的问题上。因此,这一章主要讨论了BDL的各种应用场景,包括推荐系统,控制问题等。在这里我们默认任务模块使用vanilla Bayesian networks作为这个部分的模型。
5.1 Supervised Bayesian Deep Learning for Recommender Systems
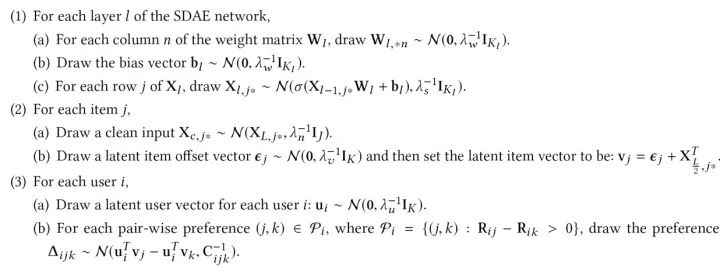
Collaborative Deep Learning。文章在这个部分提出Collaborative Deep Learning(CDL)来处理推荐系统的问题,这种方法连接了content information(一般使用深度学习方法处理)和rating matrix(一般使用协同过滤)。
使用4.3.2提到的Probabilistic SDAE,CDL模型的生成过程如下:
为了效率,我们可以设置趋向正无穷,这个时候,CDL的图模型就可以用下图来表示了:
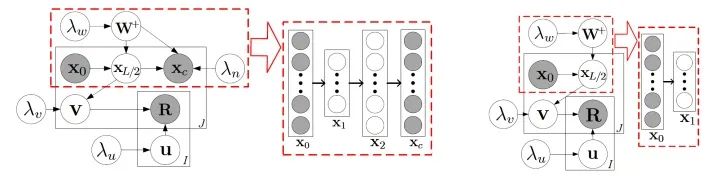
红色虚线框中的就是SDAE(图上是L=2的情况),右边是degenerated CDL,我们可以看到,degenerated CDL只有SDAE的encoder部分。根据我们之前定义过的, 就是hinge variable,而
就是hinge variable,而 是task variables,其他的是perception variables。
是task variables,其他的是perception variables。
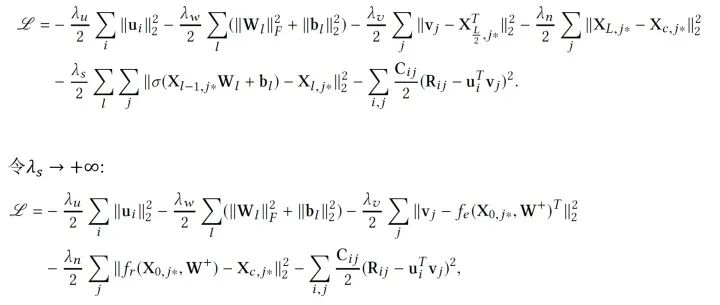
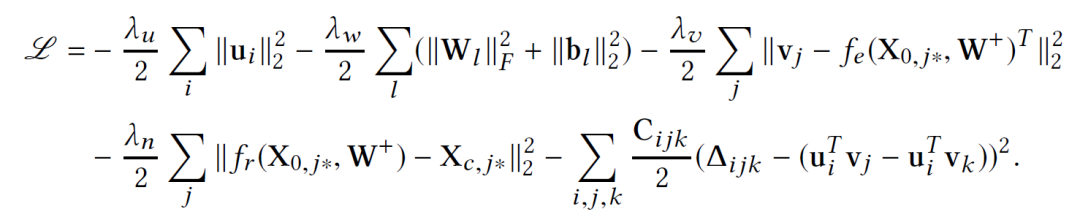
那么我们应该如何训练这个模型呢?直观来看,由于现在所有参数都被我们当做随机变量,我们可以使用纯贝叶斯方法,比如VI或MCMC,然而这样计算量往往是巨大的,因此,我们使用一个EM-style的算法去获得MAP估计。先定义需要优化的目标,我们希望最大化后验概率,可以等价为最大化给定 的joint log-likelihood。
的joint log-likelihood。
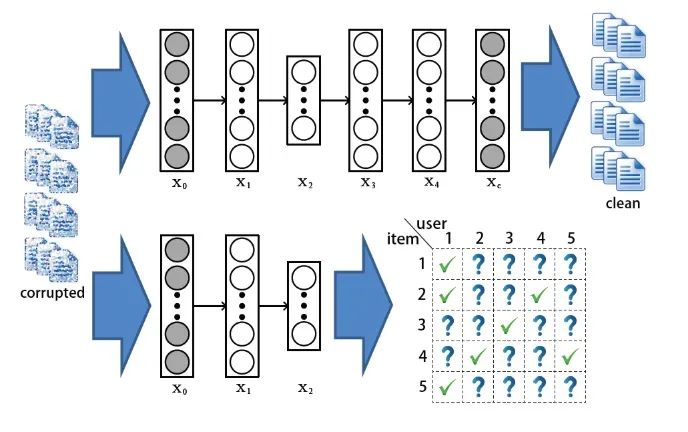
注意,当 趋向无穷时,训练CDL的概率图模型就退化为了训练下图的神经网络模型:两个网络有相同的加了噪音的输入,而输出是不同的。
趋向无穷时,训练CDL的概率图模型就退化为了训练下图的神经网络模型:两个网络有相同的加了噪音的输入,而输出是不同的。
有了优化的目标,参数该如何去更新呢?和巧妙的EM算法的思路类似,我们通过迭代的方法去逐步找到一个局部最优解:
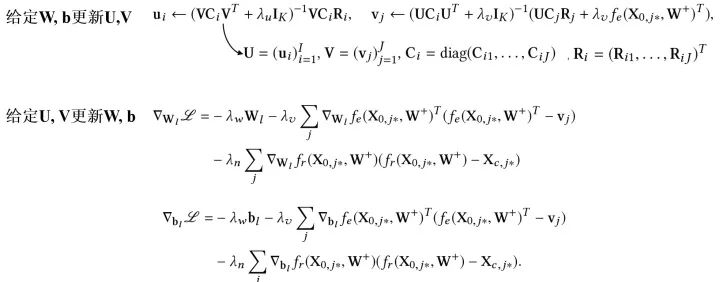
当我们估计好参数,预测新的评分就容易了,我们只需要求期望即可,也就是根据如下公式计算:

Bayesian Collaborative Deep Learning:除了这种模型,我们可以对上面提到的CDL进行另外一种扩展。这里我们不用MAP估计,而是sampling-based算法。主要过程如下:
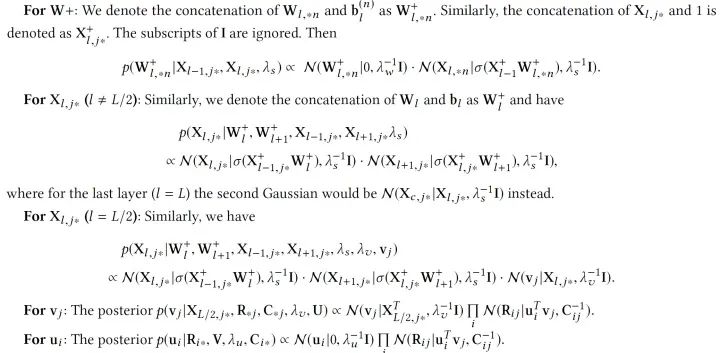
当趋向正无穷并使用adaptive rejection Metropolis sampling时,对 采样就相当于BP的贝叶斯泛化版本。
采样就相当于BP的贝叶斯泛化版本。
Marginalized Collaborative Deep Learning:在SDAE的训练中,不同训练的epoch使用不同的corrupted input,因此训练过程中需要遍历所有的epochs,Marginalized SDAE做出了改进:通过边缘化corrupted input直接得到闭式解。
Collaborative Deep Ranking:除了关注精确的评分,我们也可以直接关注items的排名,比如CDR算法:
这个时候我们需要优化的log-likelihood就会成为:
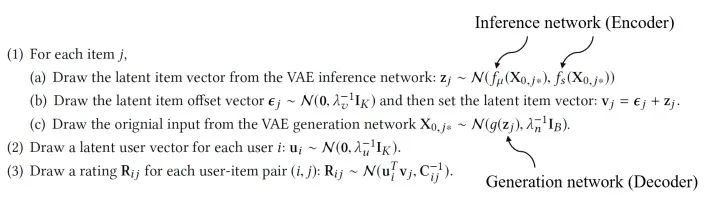
Collaborative Variational Autoencoders:另外,我们可以将感知模块的Probabilistic SDAE换成VAE,则生成过程如下:
总之,推荐系统问题往往涉及高维数据(文本、图像)处理以及条件关系推断(用户物品关系等),CDL这类模型使用BDL的框架,能发挥很重要的作用。当然其他监督学习的任务也可以参考推荐系统的应用使用CDL的方法。
5.2 Unsupervised Bayesian Deep Learning for Topic Models
这一小节过渡到非监督问题中,在这类问题中我们不再追求 “match” 我们的目标,而更多是 “describe” 我们的研究对象。
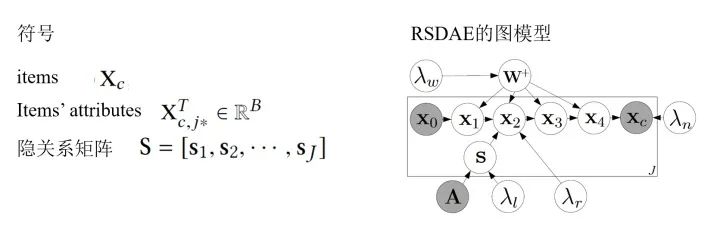
Relational Stacked Denoising Autoencoders as Topic Models (RSDAE):在RSDAE中我们希望能在关系图的限制下学到一组topics(或者叫潜因子)。RSDAE能“原生地”集成潜在因素的层次结构和可用的关系信息。其图模型的形式和生成过程如下:
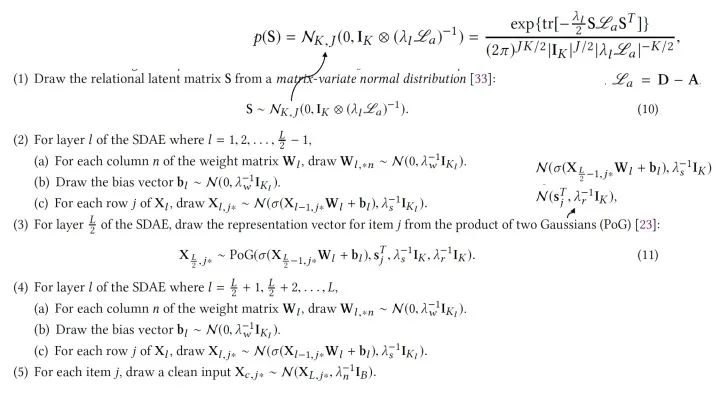
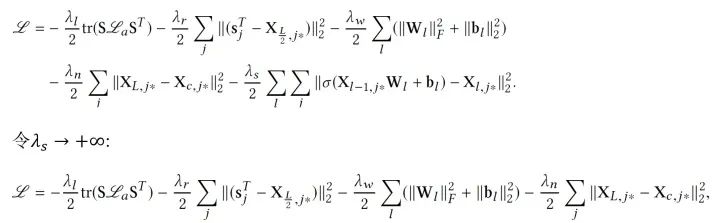
同样的,我们最大化后验概率,也就是最大化各种参数的joint log-likelihood:
训练的时候我们依然使用EM-style的算法去找MAP估计,并求得一个局部最优解(当然也可以使用一些带skip的方法尝试跳出局部最优),具体如下:
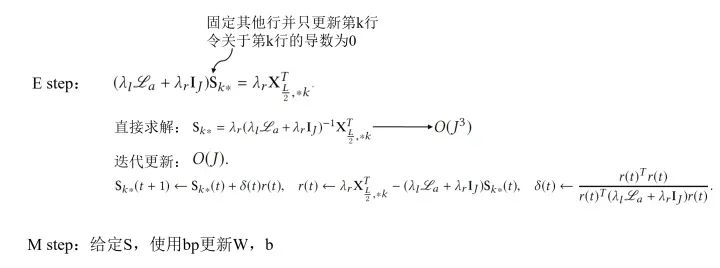
Deep Poisson Factor Analysis with Sigmoid Belief Networks:泊松过程适合对于非负计数相关的过程建模,考虑到这个特性,我们可以尝试把Poisson factor analysis(PFA)用于非负矩阵分解。这里我们以文本中的topic问题作为例子,通过取不同的先验我们可以有多种不同的模型。
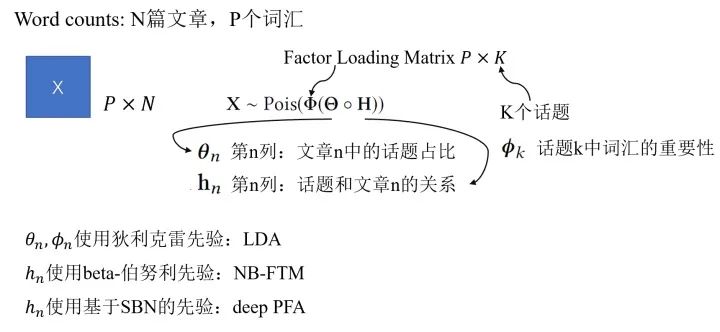
比如说,我们可以通过采用基于sigmoid belief networks(SBN)的深度先验,构成DeepPFA模型。DeepPFA的生成过程具体如下:
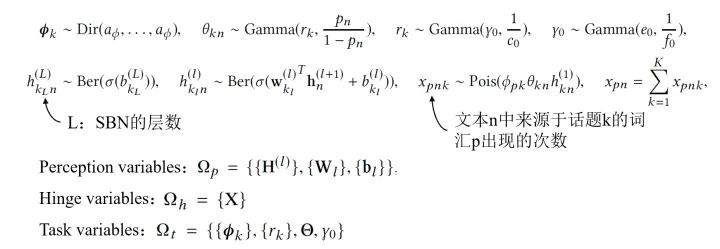
这个模型训练的方式是用Bayesian Conditional Density Filtering(BCDF),这是MCMC的一种online版本;也可以使用Stochastic Gradient Thermostats(SGT),属于hybrid Monto Carlo类的采样方法。
Deep Poisson Factor Analysis with Restricted Boltzmann Machine:我们也可以将DeepPFA中的SBN换成RBM模型达到相似的效果。
可以看到,在基于BDL的话题模型中,感知模块用于推断文本的topic hierarchy,而任务模块用于对词汇与话题的生产过程,词汇-话题关系,文本内在关系建模。
5.3 Bayesian Deep Representation Learning for Control
前面两小节主要谈论BDL在监督学习与无监督学习的应用,这一节主要关注另外一个领域:representation learning。用控制问题为例。
Stochastic Optimal Control:在这一节,我们考虑一个未知动态系统的随机最优控制问题,在BDL的框架下解决的具体过程如下:
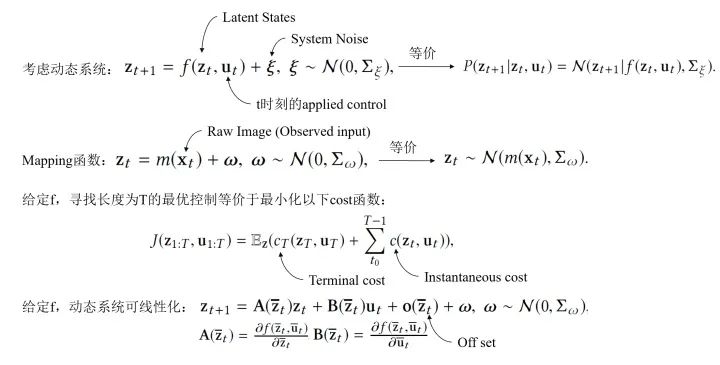
BDL-Based Representation Learning for Control:为了能够优化上述问题,有三个关键的部分,具体如下:
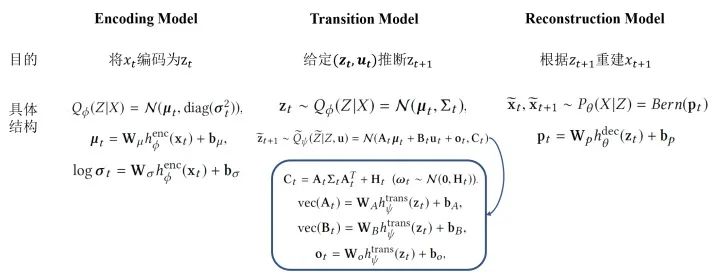
Learning Using Stochastic Gradient Variational Bayes:该模型的损失函数是如下这种形式:
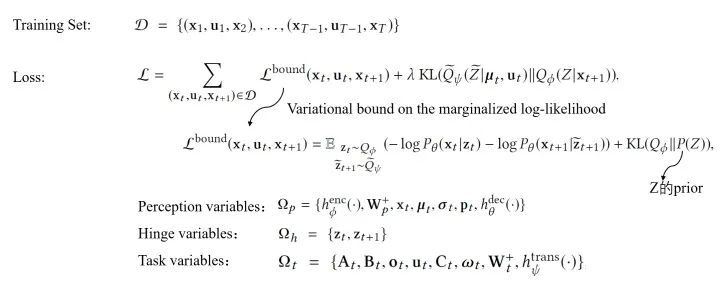
在控制的问题中,我们通常希望能够从原始输入中获取语义信息,并在系统状态空间中保持局部线性。而BDL的框架正好适用这一点,两个组件分别能完成不同的工作:感知模块可以捕获 live video,而任务模块可以推断动态系统的状态。
5.4 Bayesian Deep Learning for Other Applications
除了上面提到的,BDL还有其他诸多运用场景:链路预测、自然语言处理、计算机视觉、语音、时间序列预测等。比如,在链路预测中,可以将GCN作为感知模块,将stochastic blockmodel作为任务处理模块等。
6 Conclusion and Future Research
现实中很多任务都会涉及两个方面:感知高维数据(图像、信号等)和随机变量的概率推断。BDL正是应对这种问题的方案:结合了NN和PGM的长处。而广泛的应用使得BDL能够成为非常有价值的研究对象,目前这类模型仍然有着众多可以挖掘的地方。
往期精彩: