
20210423 毫米波雷达技术趋势
关注涛涛CV,设置星标,更新不错过
-------------------------------------------
查看了市面下目前的毫米波雷达资料,参考了几家公司技术参数,不希望出现,联系我修改。
总结趋势如下
一、交通雷达
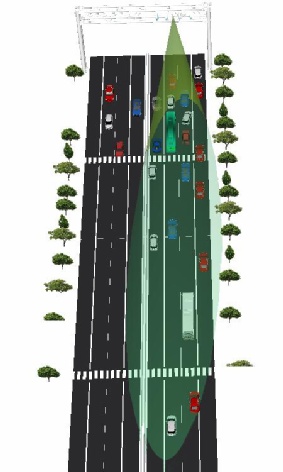
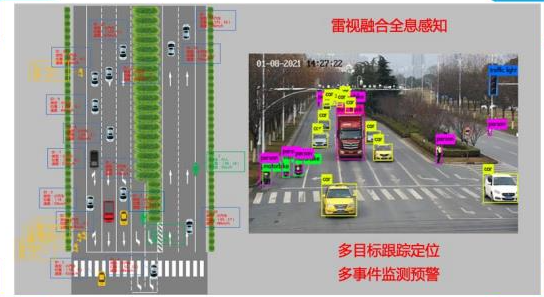
交通场景雷达主要应用于高速路况监测和城市红绿灯智能控制,可探测前方250米内道路上违章停车、超速、违规并线、应急车道行驶等事件,获取当前监视场景中各个车辆的位置并跟踪所有车辆行驶轨迹;同时还可提供车速、车流量、车道占有率、平均车速、车辆排队长度等信息。用户通过雷达可实时获悉路况信息,从而判别出交通道路拥堵、异常等事件。

功能特点:
雷达距离和速度分辨率高,车辆定位精准,测速精确。
雷达实现多车道检测,自动划分车道,跟踪不同车道车辆,准确检测其速度以及位置,并自动识别车辆来去向。
雷达横向覆盖1~8个车道,纵向覆盖250米,实现大场景检测。
雷达涵盖传统微波车辆检测器功能,可提供信息包括:车速、车流量、车头时距、车型分类、道路占有率等信息。
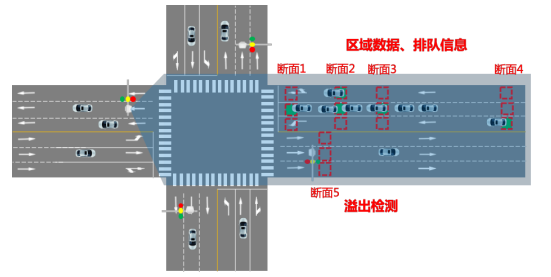
雷达能够实现车道的拥堵信息判断,统计排队车辆长度,发送拥堵信息。
雷达根据车辆轨迹,判断车辆逆行、急停、变道等交通异常事件。
雷达可检测近处非机动车。
雷达具有实时时钟,可与网络时钟同步。
雷达具有大容量存储区,掉电数据不丢失。
雷达具有全天候工作能力,不受光线和雨、雪、雾等天气影响。
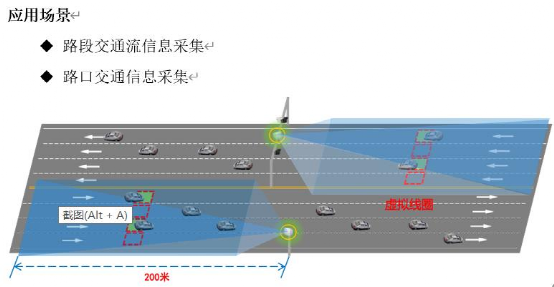
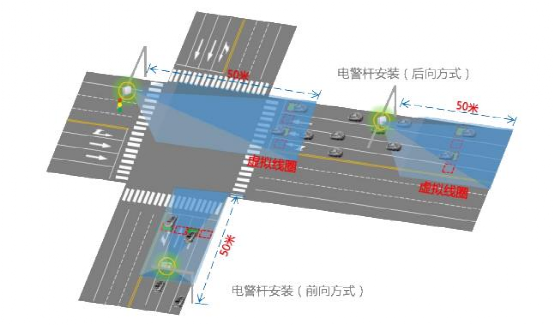
典型应用:
1. 实时监测城市十字路口拥堵和排队长度,辅助信号灯自适应系统。
2. 高速公路/城市道路某路口或路段交通车流量统计,交通信息采集。
3. 高速公路路况实时监测,所有车辆全轨迹跟踪,车辆驾驶行为分析。
4. 高速公路异常事件监视,例如道路拥堵、车辆逆行、违停、违规变道、高速、低速行驶等。
5. 智慧城市车路协同,优化交通组织,全路段所有车辆全轨迹跟踪,全路段车流量监控,红绿灯全自动控制。
高速公路应用
技术参数:
安装高度 | 6米~10米 |
安装位置 | 正顶装、斜侧装 |
覆盖车道数 | 1~8车道 |
探测距离 | 250米 |
距离分辨率 | 最优0.4米 |
测速范围 | (5~200)km/h |
速度分辨率 | 0.4km/h |
跟踪目标个数 | 最大128 |
车流量 | 单车道≥95%, 总车道≥95% |
车道占有率 | 单车道≥95%, 总车道≥95% |
拥堵信息判断准确率 | 95% |
逆行车辆识别准确率 | 95% |
变道车辆识别准确率 | 95% |
异常停车事件准确率 | 95% |
数据更新率 | ≤100ms |
通信接口 | RS485,网口,WIFI模块 |
二、流量雷达
可检测多条车道的车流量、车道占有率、平均车速、车头时距、车型分类等车道信息。该设备广泛应用于高速公路或城市快速道路的交通信息检测,为交通管理提供准确、可靠、实时的交通情报,保障交通管理系统的正常运行。
功能特点:
雷达可自主高精度地划分车道,触发定位准确,覆盖多个车道,能够及时准确反馈对多个车道的基本信息,包括:车流量、道路占有率、平均车速、车型分类等交通信息。
软件操作界面简单明了,支持客户自定义数据查询间隔,灵活性强。
支持RS232/RS485通信,支持TCP/IP协议,支持无线传输,支持开放的通信协议,适应性强,可根据用户需要定制。
雷达的设置参数等数据不因断电而丢失。
安装简单,维护方便,能够适应全天候工作,不受大风、雨雪、冰雹等恶劣天气的影响,抗干扰能力强。
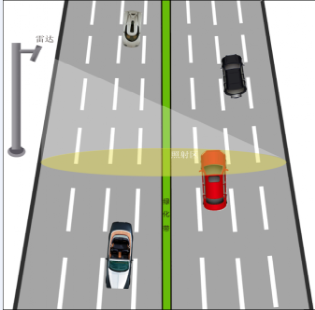
安装形式:
该雷达安装方式是侧顶装,将雷达安装于道路旁的立杆进行测量,雷达照射方向与道路垂直,此时,雷达照射区能覆盖多个车道,可提供多个车道的路况信息,其安装方式如下图所示:
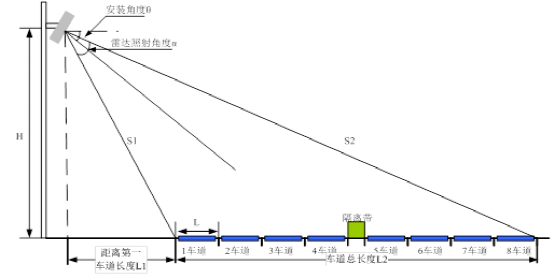
由于雷达照射区与雷达的安装夹角、高度及与第一车道外侧的距离(侧装方式)还有车道宽度、绿化带距离和宽度等因素有关,因此雷达安装时请使用辅助测量设备,将以上安装参数测量并输入系统。安装参数示意图如下图所示:
技术参数
| 工作中心频率 | 24.15GHz |
| 作用距离(投影点) | 0~85米 |
| 波束宽度 | 4.5º×75º |
| 车道数目 | 双向8-12车道 |
| 车道划分 | 自动/手动划分车道 |
| 检测信息 | 车流量、车道占有率、平均车速、车头时距、车型分类等 |
| 车型分类 | 可自定义,默认可分为:超大型车、大型车、中型车、小型车 |
| 车流量检测精度 | 单车道≥95%;总流量≥98% |
| 车道占有率监测精度 | ≥95% |
| 平均车速 | ≥95% |
| 温度范围 | -40ºC~+85ºC |
| 湿度范围 | 5%RH~95%RH |
| 全天候工作 | 全天候不间断工作,不受气候、雨雪、冰雹等恶劣天气影响 |
| 电源 | (9~30)V DC |
| 功耗 | ≤4W,支持太阳能供电 |
| 数据查询周期 | 客户可自定义 |
| 通信接口 | RS232/ RS485,支持TCP/IP协议,支持无线传输 |
| 数据存储FLASH | 64M ,可扩展SD卡 |
| 内置实时时钟 | 不依赖网络时钟 |
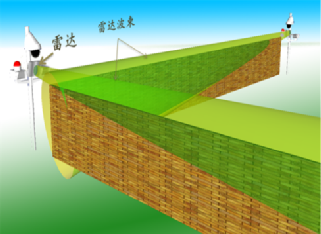
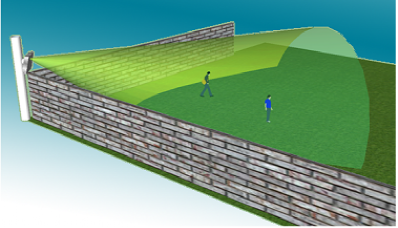
二、安防雷达
安防雷达采用FMCW体制,具有距离盲区小、没有速度盲点、高距离分辨力、抗干扰性良好等特点。可以侦测雷达覆盖范围内的移动人员、大型动物、移动车辆等低速或者高速移动目标。雷达可探测目标穿越的距离、速度、高度信息,由此可划分报警区域及配合球机等外设进行联动。
后台接入的软件平台会自动弹出报警电子地图,联动视频图像,并可在多个指定的监视器上同时弹出报警位置视频画面,系统与视频监控进行联动并可将该区域监控图像自动切换到大屏幕画面。
功能特点:
准确报警:雷达能够探测各种快速或慢速的入侵目标,包括移动的车辆、人和大型动物。
精确定位:能够准确定位入侵目标,输出入侵目标的距离信息。
联动抓拍:雷达引导球机准确定位目标,控制联动摄像机作近场抓拍。
快速响应:从发现警情到报警中心收到警讯过程不过0.5秒。
低误报率:非附录列举情况下,误报次数不超过1次/月。
低漏报率:非附录列举情况下,漏报次数不超过1次/100次。
可定制化:雷达485输出接口,可提供继电器、网络传输模块。
可靠性高:微波雷达能够全天候工作。
应用领域:
厂区保护
机场安全区域保护
输油管道和油田保护
技术参数:
| 天线波束宽度 | near:70°× 100°@3dB far:5°× 20°@3dB |
| 中心频率 | 24.15GHz |
| 发射功率 | ≤15dBm |
| 电源 | (9~36)V DC |
| 额定功率 | <10w< span=""> |
| 探测距离 | (0.1~250)m |
| 探测高度 | near:22m+H(D=18m)far:44m+H(D=250m)D:为距离雷达的径向距离H:雷达的架设高度 |
| 网口传输协议 | TCP/IP |
| 网口类型 | 100M/1000M自适应 |
| 雷达工作模式 | 服务器 |
| 最大连接客户端数量 | 10个 |
| IP | 可查询可更改 |
| 远程操控升级 | 支持 |
| 防区及屏蔽区划分功能 | 有(最多5个矩形区域) |
| 距离分辨率 | 近程:0.25m 远程:1m |
| 角度分辨率(MAX) | 近程水平:31°远程水平:2.2近程俯仰:32°远程俯仰:8.5° |
| 角度精度(MAX) | 近程水平:<8.3°远程水平:<1°近程俯仰:<8.6°远程俯仰:<2.7° |
| 检测测速范围 | 0.36km/h~36km/h |
| 是否测高 | 是 |
| 最大同时检测目标数目 | 64个 |
| 产品类型 | 传感器 |
| 数据更新率 | 最小64ms,可配置 |
| 工作温度范围 | -40ºC~+75ºC |
| 工作湿度范围 | 5%RH~95%RH |
| 通信接口 | RS485,网口,继电器开关量 |
| 安装方式 | 支柱、墙面等 |
| 雷达尺寸 | 240mm(长)×195mm(宽)×58mm(高) |
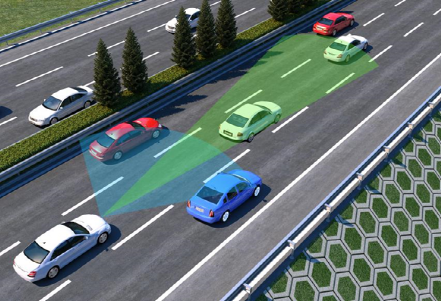
三、汽车雷达
77GHz前向远程毫米波雷达采用8发8收架构,能够实时监测车辆前方最多64个目标,获取前方目标的距离、相对速度、方位角度和高度信息。与视频、激光等传感器相比,具有远距离探测能力,且不受天气和光线情况的影响,能全天时、全天候工作。

产品特点:
77GHz毫米波工作频段,分辨率高、性能优异。
远程、近程综合探测,最远探测距离达256米。
具有测高功能,有效识别道路隔离带、指示牌、高架桥等静止干扰目标。
产品应用
1. FCW(Forward Collision Warning ,前向防撞预警)
2. ACC(Auto Cruise Control,自动巡航控制)
3. AEB(Auto Emergency Brake,自动紧急制动)
技术参数:
频段 | 76GHz~77GHz |
距离测量范围 | 近程:0.5m~60m 远程:2m~256m |
距离分辨率 | 近程:0.5m 远程:2m |
距离测量精度 | 0.1m |
速度测量范围 | -360 km/h~+180 km/h |
速度分辨率 | 0.47 km/h |
速度测量精度 | 0.1 km/h |
方位角测量范围 | 近程:120° 远程:17° |
方位角分辨率 | 近程:2.5° 远程:1.7° |
方位角测量精度 | 0.1° |
俯仰角测量范围 | 12.5° |
俯仰角测量精度 | 0.3° |
刷新周期 | 40ms |
通信接口 | CAN,符合ISO11898-2标准 |
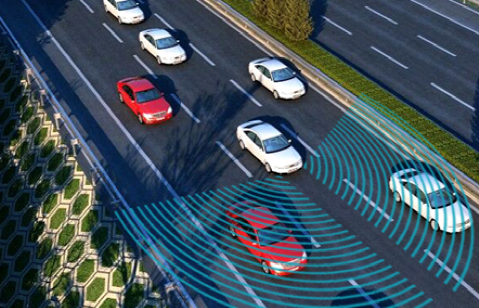
77GHz前角毫米波雷达可安装于车辆前方左右探照灯附近,可在中近程距离范围内检测本车前方的盲点区域;可探测目标的距离、速度和方位角度,具有多目标识别与跟踪能力。
产品特点
对车辆侧前方目标实现全天时、全天候监测。
短近距离区域、宽方位角度范围探测。
多目标识别与跟踪,获取目标的速度和距离、角度信息。
车辆盲区内有车辆靠近时,进行提醒和报警。
产品应用
FCTA( Front Crossing Traffic Alert,前方交通穿行提示)
技术参数:
| 工作频率 | 77GHz |
| 射频前端 | 3Tx + 4Rx |
| 距离范围 | 0.75m~70m |
| 距离精度 | 0.1 m |
| 速度范围 | -360km/h~+180km/h |
| 速度精度 | 2.7km/h |
| 方位角度范围 | 120deg or 20deg |
| 工作电压 | (9~24)V DC |
| 功耗 | 3 W |
| 工作温度 | -40ºC~+125ºC |
| 输出周期 | 50ms |
| 通信接口 | 标准CAN接口,符合iso11898-2标准,500kb/s |
| 尺寸 | 103mm×60mm×20mm |
-------------------------------------------
笔记:
《智能革命》《人工智能》《AI•未来》《好好赚钱》《韭菜的自我修养》读书笔记
行业:
服务机器人公司,机器视觉公司,自动驾驶公司,ADAS公司总结,
SLAM:
Vslam方案+源码,语义SLAM与深度相机,SLAM和导航避障,视觉SLAM总结
秦学英《三维物体的识别与跟踪》,章国锋《视觉SLAM》,申抒含《基于图像的三维建模》,姜翰青《RGB -D SLAM》记录笔记
总结:
机器视觉:
机器视觉基本概念笔记,记录五,记录四,记录三,记录二,记录一
图像处理:
图像处理基本概念笔记,记录八,记录七,记录六 ,记录五,记录四 ,记录三,记录二 ,记录二,记录一
欢迎支持,点击在看,分享