基于毫米波雷达和机器视觉的夜间前方车辆检测
点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
01
夜间车辆检测算法实现
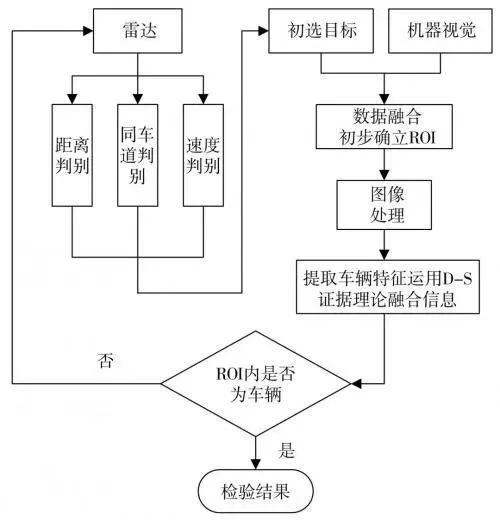
图 1 夜间前方车辆检测方法流程图
02
假设产生(HG)
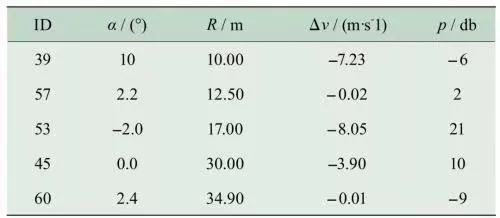
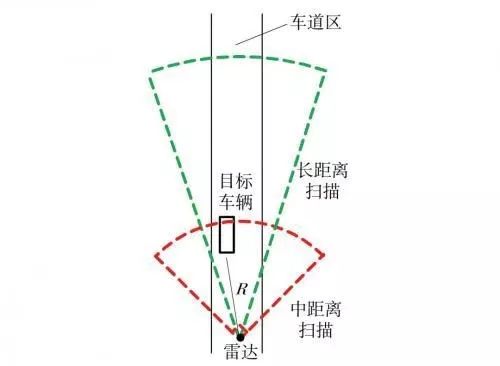
2.1 雷达数据处理及初选目标的确定
表 1 初选有效目标信号
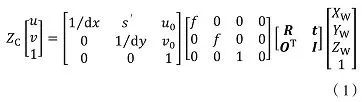
2.2 雷达数据和机器视觉的融合

03
假设验证(HV)
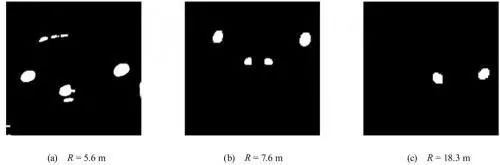
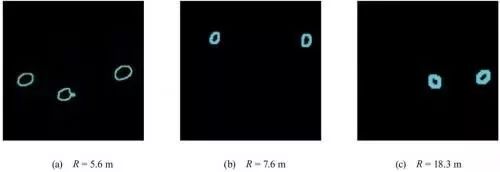
3.1 图像分割


04
试验结果
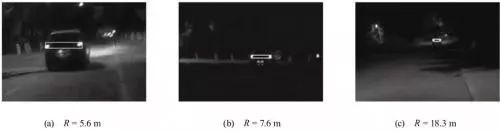
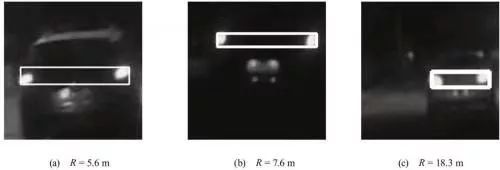
图 9 夜间前方车辆识别
表 2 车辆检测的实验结果

05
结论
本文仅做学术分享,如有侵权,请联系删文。
评论
 下载APP
下载APP点击下方卡片,关注“新机器视觉”公众号
视觉/图像重磅干货,第一时间送达
01
夜间车辆检测算法实现
图 1 夜间前方车辆检测方法流程图
02
假设产生(HG)
2.1 雷达数据处理及初选目标的确定
表 1 初选有效目标信号
2.2 雷达数据和机器视觉的融合
03
假设验证(HV)
3.1 图像分割
04
试验结果
图 9 夜间前方车辆识别
表 2 车辆检测的实验结果
05
结论
本文仅做学术分享,如有侵权,请联系删文。