
【深度学习】解决物体检测中的小目标问题

为了提高模型在小物体上的性能,我们建议使用以下技术:
提高图像捕获分辨率
提高模型的输入分辨率
平铺图像
通过扩充生成更多数据
自动学习模型锚
过滤掉多余的类
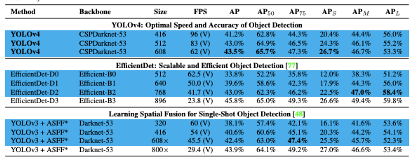
例如,在 EfficientDet 中,小物体的 AP 仅为 12%,而大物体的 AP 为 51%,这几乎是五倍的差距!
那么为什么检测小物体这么难呢?
这一切都取决于模型,目标检测模型通过聚合卷积层中的像素来形成特征。
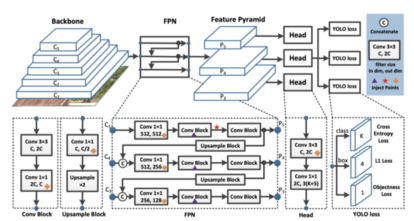
PP-YOLO中目标检测的特征聚合
并且在网络的末端,基于损失函数进行预测,该损失函数基于预测和地面真实情况之间的差异对像素进行汇总。
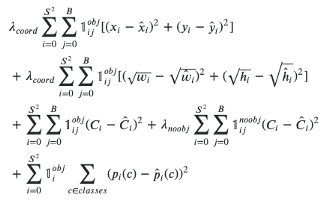
YOLO中的损失函数
如果地面真值框不大,则在进行训练时信号会很小。此外,小物体最有可能存在数据标记错误,因此它们的标识可能会被省略,从经验和理论上来说,小物体是难的。
非常小的物体在边界框中可能只包含几个像素——这意味着提高图像的分辨率以增加检测器可以从该小框中形成的特征的丰富度非常重要。因此,如果可能,我们建议尽可能捕获高分辨率的图像。
在我们关于培训YOLOv4的教程中,我们可以通过更改配置文件中的图像大小来轻松调整输入分辨率。
[net]batch=64subdivisions=36width={YOUR RESOLUTION WIDTH HERE}height={YOUR RESOLUTION HEIGHT HERE}channels=3momentum=0.949decay=0.0005angle=0saturation = 1.5exposure = 1.5hue = .1learning_rate=0.001burn_in=1000max_batches=6000policy=stepssteps=4800.0,5400.0scales=.1,.1
在我们的教程中,小伙伴们还可以通过更改“训练”命令中的“图像大小”参数,轻松调整输入分辨率,该教程介绍了如何训练YOLOv5:
!python train.py --img {YOUR RESOLUTON SIZE HERE} --batch 16 --epochs 10 --data '../data.yaml' --cfg ./models/custom_yolov5s.yaml --weights '' --name yolov5s_results --cache注意:只有在达到训练数据的最大分辨率时,才能看到改进的结果。
检测小图像的另一种很好的策略是将图像平铺作为预处理步骤。平铺可以有效地将检测器放大到小物体上,但允许我们保持所需的小输入分辨率,以便能够进行快速推理。
 平铺图像作为 Roboflow 中的预处理步骤
平铺图像作为 Roboflow 中的预处理步骤
如果在训练期间使用平铺,请务必记住,我们还需要在推理时平铺图像。
数据扩充会从我们的基本数据集生成新图像,这对于防止模型过度拟合训练集非常有用。
一些特别有用的小物体检测增强包括随机裁剪、随机旋转和镶嵌增强。
锚定框是模型学习预测的原型边界框,也就是说,锚框可以预先设置,有时对于我们的训练数据来说不是最理想的。自定义调整这些参数以适合我们即将完成的任务是很好的,YOLOv5 模型架构会根据我们的自定义数据自动为我们执行此操作,我们所要做的就是开始训练。
Analyzing anchors... anchors/target = 4.66, Best Possible Recall (BPR) = 0.9675. Attempting to generate improved anchors, please wait... WARNING: Extremely small objects found. 35 of 1664 labels are < 3 pixels in width or height. Running kmeans for 9 anchors on 1664 points... thr=0.25: 0.9477 best possible recall, 4.95 anchors past thr n=9, img_size=416, metric_all=0.317/0.665-mean/best, past_thr=0.465-mean: 18,24, 65,37, 35,68, 46,135, 152,54, 99,109, 66,218, 220,128, 169,228 Evolving anchors with Genetic Algorithm: fitness = 0.6825: 100%|██████████| 1000/1000 [00:00<00:00, 1081.71it/s] thr=0.25: 0.9627 best possible recall, 5.32 anchors past thr n=9, img_size=416, metric_all=0.338/0.688-mean/best, past_thr=0.476-mean: 13,20, 41,32, 26,55, 46,72, 122,57, 86,102, 58,152, 161,120, 165,20类管理是提高数据集质量的一项重要技术,如果我们的一个类与另一个类明显重叠,则应从数据集中过滤该类。也许,我们认为数据集中的小对象不值得检测,因此我们可能想要将其取出。通过Roboflow Pro中的高级数据集进行状况检查,我们可以快速识别所有这些问题。
可以通过Roboflow 的本体管理工具来实现类遗漏和类重命名。
正确检测小物体确实是一个挑战。在这篇文章中,我们讨论了一些改进小物体检测器的策略,即:
提高图像捕获分辨率
提高模型的输入分辨率
平铺图像
通过扩充生成更多数据
自动学习模型锚
过滤掉多余的类
往期精彩回顾 本站qq群851320808,加入微信群请扫码: