
【CV】一文图解单目相机标定算法












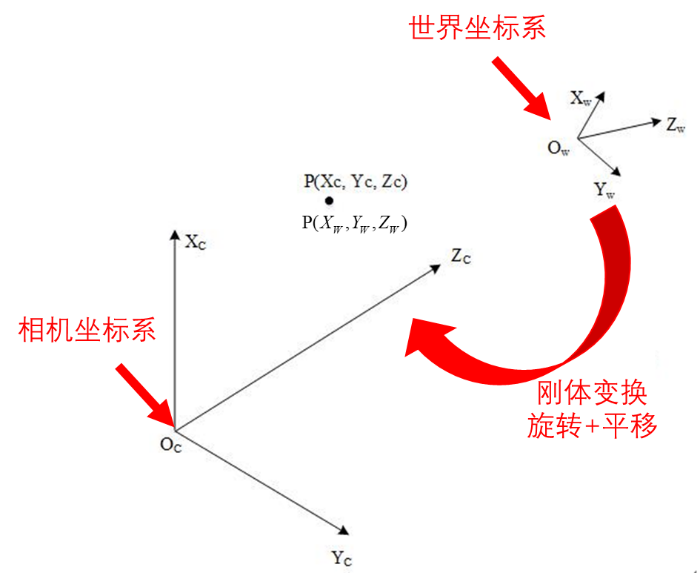
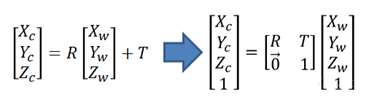
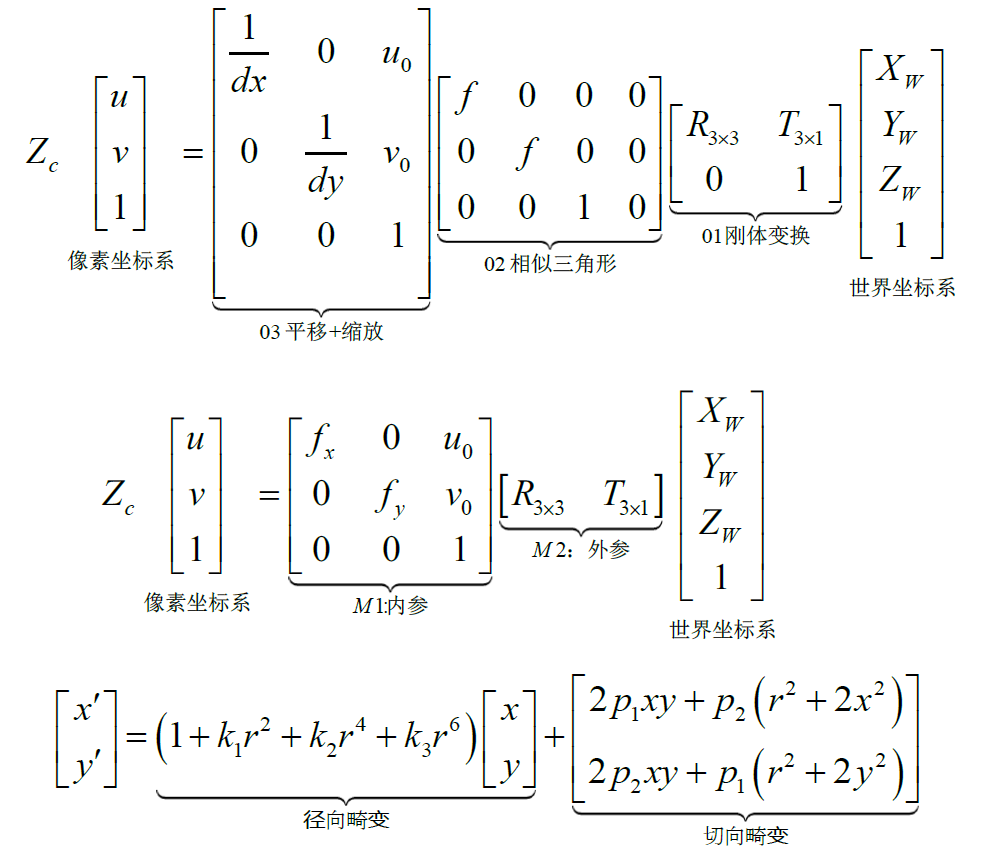
2.1世界坐标系 -> 相机坐标系

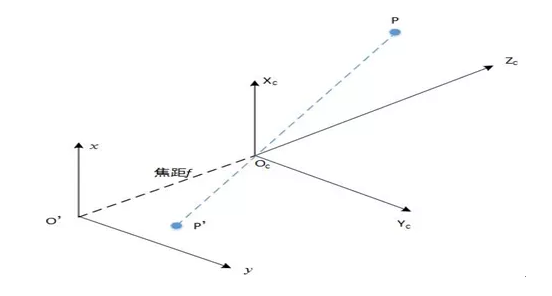
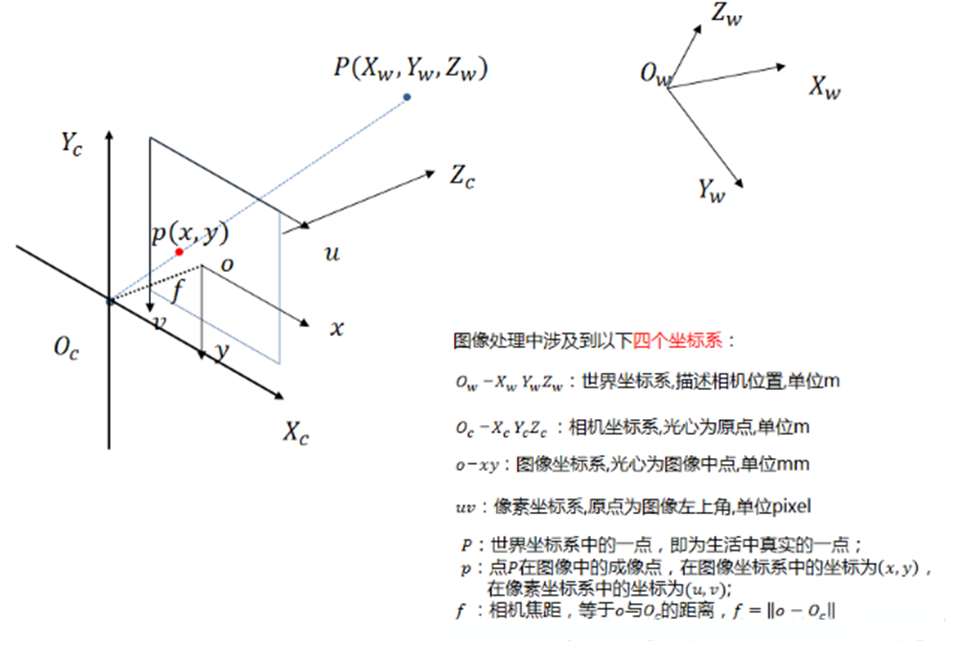
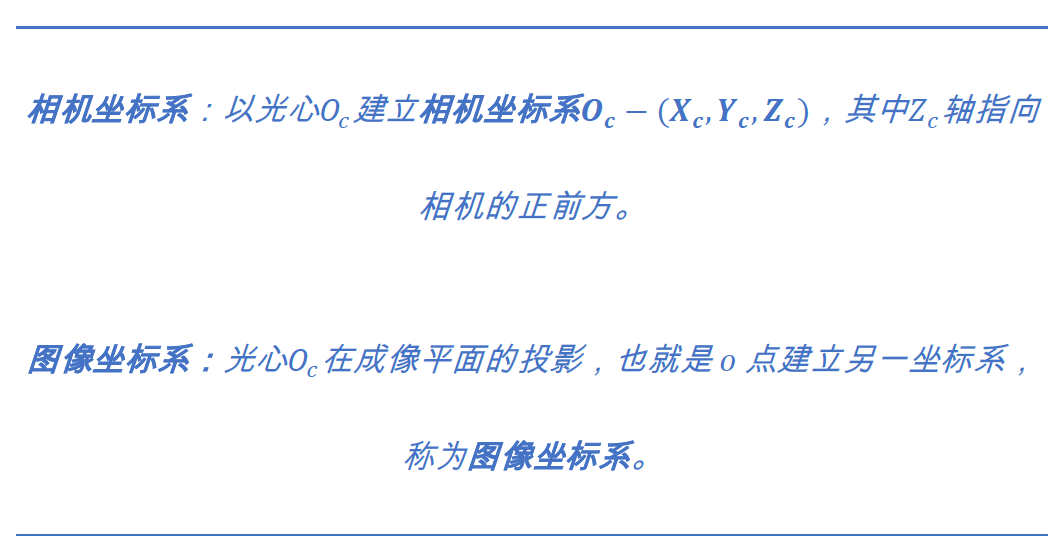
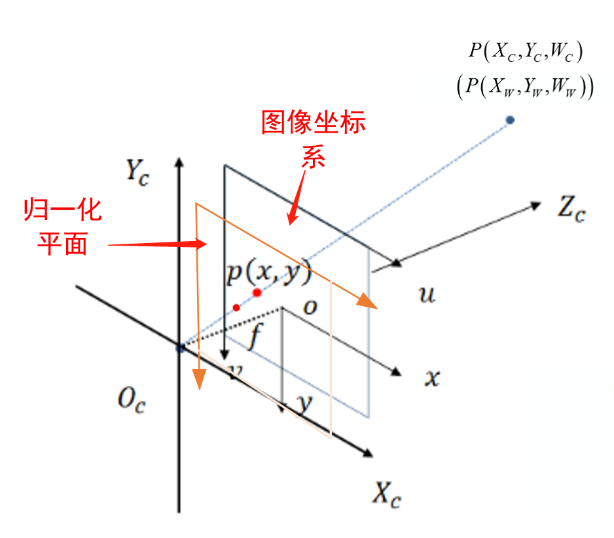
2.2 相机坐标系 -> 图像坐标系
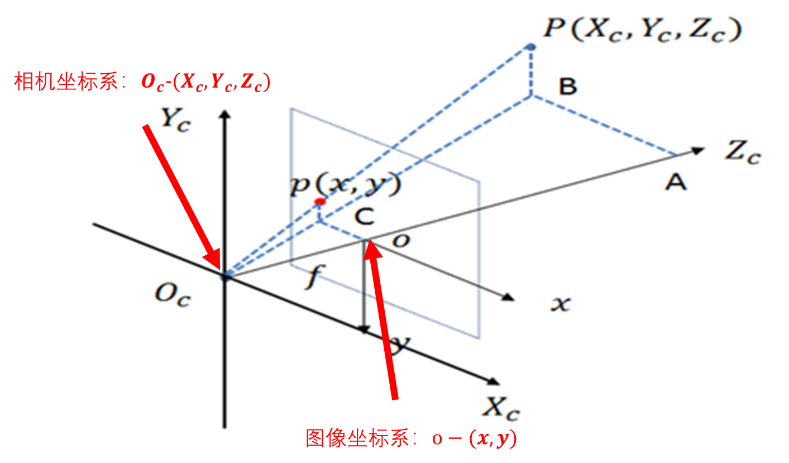
先回顾一下前面所说的,如我们之前所说:P是物点、P’是像点,现在我们将它翻转过来了,记作小写的p。其中:




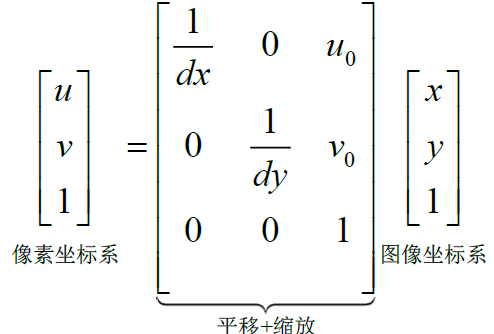
将其进行移项,并写为齐次的形式,有:




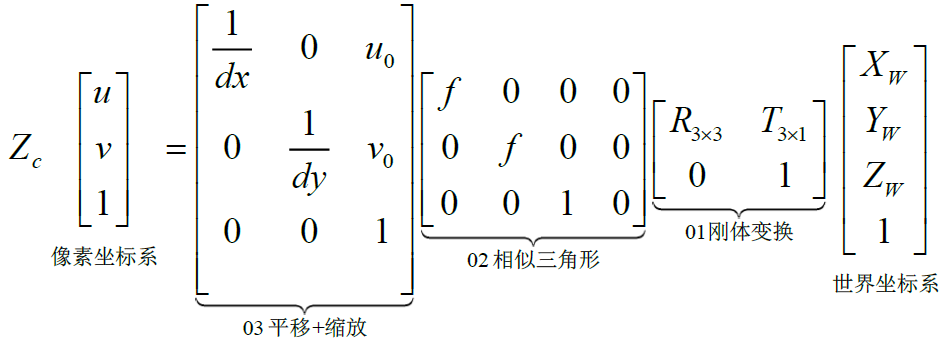

这个公式就是整个单目相机在理想情况下的成像公式,可以建立世界坐标系到像素坐标系的一一映射。
再补充一个知识点,归一化平面:



3.1径向畸变
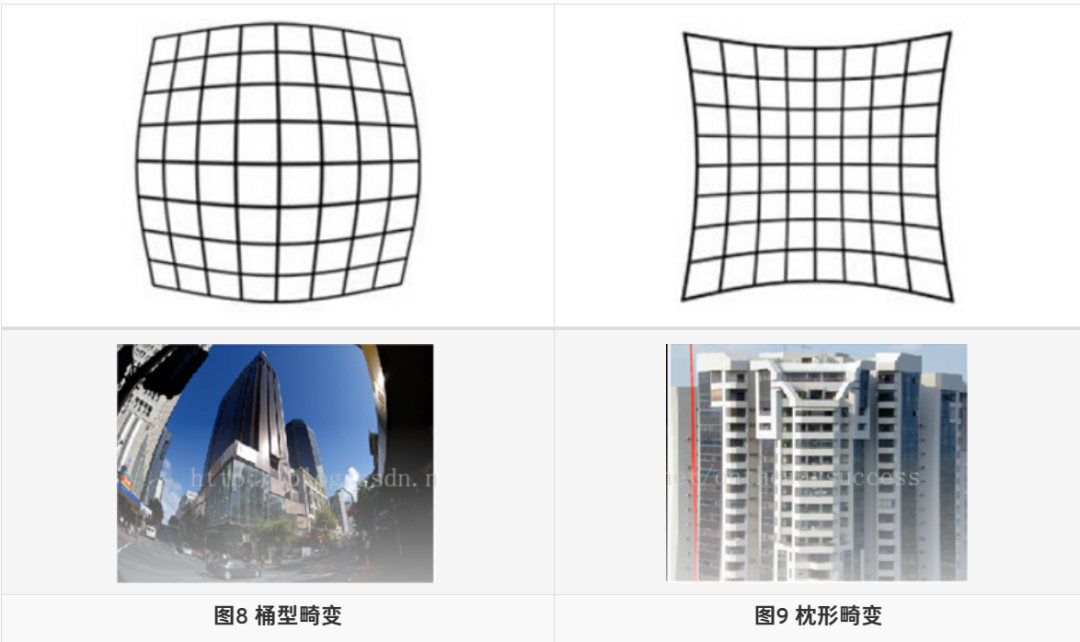


需要注意的是,这里校正,并不是用的系数越多,整个矫正结果越精确,我们应该考虑相机的实际情况,选择合适的参数数量。
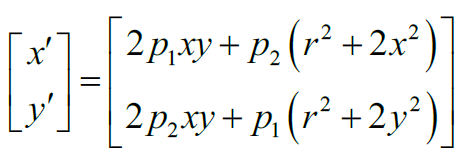
3.2切向畸变
切向畸变原因:切向畸变产生的原因在于相机在制造过程中,成像平面与透镜平面不平行,产生了透视变换。


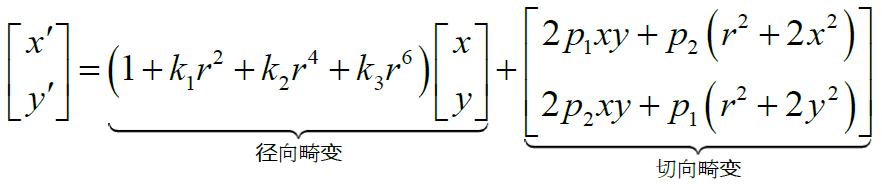
3.3合并考虑

当看完这次推文之后,请大家在脑海里梳理以下几个概念:
世界坐标系、相机坐标系、图像坐标系、像素坐标系、归一化坐标系,它们之间的差别是什么,怎么进行相互转换? 径向畸变、切向畸变、它们的主要因素、以及如何去校正? 最好的话,你自己去画这个图,去推导一遍公式。虽然你后面公式会忘,但相信我,3D视觉领域好多公式,我不需要你记住它,但你要有个直觉印象,去推导一遍有助于你真正理解这个公式。
相机标定,我们究竟要标定那些参数? 相机畸变发生在四大坐标系转换的哪一过程? 假设我们拿到了这些参数怎么用? 对于每个物点,在像素坐标系下都有唯一像点与之对应,那么反过来是否成立? 怎么去评判标定的好不好?
往期精彩回顾
本站知识星球“黄博的机器学习圈子”(92416895)
本站qq群704220115。
加入微信群请扫码:
评论