
特斯拉AI总监:我复现了LeCun 33年前的神经网络,发现和现在区别不大
点击上方“视学算法”,选择加"星标"或“置顶”
重磅干货,第一时间送达
导读
最近,特斯拉 AI 高级总监 Andrej Karpathy 做了一件很有趣的事情,他把 Yann LeCun 等人 1989 年的一篇论文复现了一遍。一是为了好玩,二是为了看看这 33 年间,深度学习领域到底发生了哪些有趣的变化,当年的 LeCun 到底被什么卡了脖子。此外,他还展望了一下 2055 年的人将如何看待今天的深度学习研究。
eval: split train. loss 2.5e-3. error 0.14%. misses: 10eval: split test . loss 1.8e-2. error 5.00%. misses: 102
eval: split train. loss 4.073383e-03. error 0.62%. misses: 45eval: split test . loss 2.838382e-02. error 4.09%. misses: 82
eval: split train. loss 4.073383e-03. error 0.62%. misses: 45eval: split test . loss 2.838382e-02. error 4.09%. misses: 82
eval: split train. loss 9.536698e-06. error 0.00%. misses: 0eval: split test . loss 9.536698e-06. error 4.38%. misses: 87
eval: split train. loss 0.000000e+00. error 0.00%. misses: 0eval: split test . loss 0.000000e+00. error 3.59%. misses: 72
eval: split train. loss 8.780676e-04. error 1.70%. misses: 123eval: split test . loss 8.780676e-04. error 2.19%. misses: 43
eval: split train. loss 2.601336e-03. error 1.47%. misses: 106eval: split test . loss 2.601336e-03. error 1.59%. misses: 32
eval: split train. loss 4.073383e-03. error 0.62%. misses: 45eval: split test . loss 2.838382e-02. error 4.09%. misses: 82
eval: split train. loss 1.305315e-02. error 2.03%. misses: 60eval: split test . loss 1.943992e-02. error 2.74%. misses: 54
eval: split train. loss 3.238392e-04. error 1.07%. misses: 31eval: split test . loss 3.238392e-04. error 1.25%. misses: 24
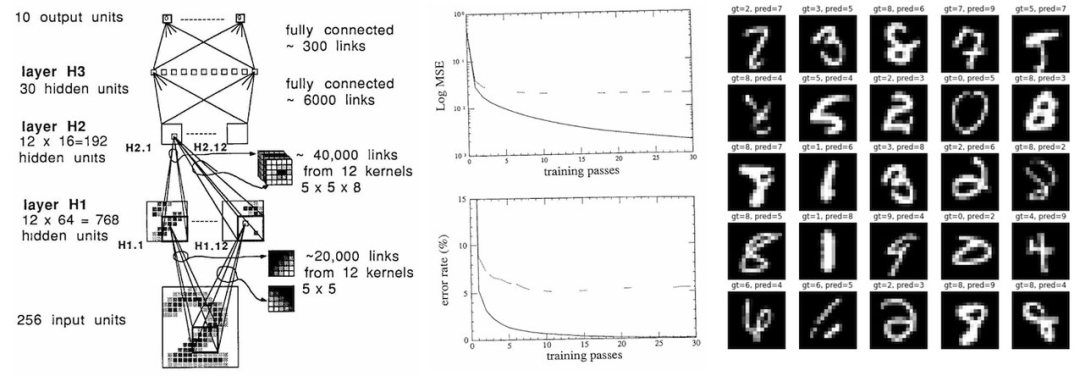
首先,33 年来的宏观层面没有太大变化。我们仍然在建立由神经元层构成的可微神经网络体系架构,并使用反向传播和随机梯度下降对它们进行端到端优化。一切读起来都非常熟悉,只是 1989 年的网络更小。
以今天的标准来看,1989 年的数据集还是个「婴儿」: 训练集只有 7291 张 16x16 的灰度图像。今天的视觉数据集通常包含来自网络的几亿张高分辨率彩色图像(谷歌有 JFT-300M,OpenAI CLIP 是在 400M 张图上训练的),而且会增长到几十亿张的规模。每张图像包含的像素信息增长了 1000 倍(384 * 384 * 3/(16 * 16)),图像数量增长了 100,000 倍(1e9/1e4) ,粗略计算的话,像素数据输入增长了 100,000,000 倍以上。
那时的神经网络也是一个「婴儿」:它大约有 9760 个参数、64K MACs 和 1K activations。当前(视觉)神经网络的规模达到了几十亿参数,而自然语言模型可以达到数万亿参数。
当年,一个 SOTA 分类器在工作站上训练需要 3 天,现在如果是在无风扇笔记本电脑上训练只需要 90 秒(3000 倍加速),如果切换到 full-batch 优化并使用 GPU,速度还能提升百倍以上。
事实上,我能够通过微调模型、增强、损失函数,以及基于现代创新的优化,将错误率降低 60% ,同时保持数据集和模型测试时间不变。
仅仅通过扩大数据集就可以获得适度的收益。
进一步的重大收益可能必须来自一个更大的模型,这将需要更多的计算和额外的研究与开发,以帮助稳定规模不断扩大的训练。如果我被传送到 1989 年,而且没有一台更大的计算机,我将无法进一步改进系统。
2055 年的神经网络在宏观层面上基本上与 2022 年的神经网络相同,只是规模更大。
我们今天的数据集和模型看起来像个笑话,2055 年的二者规模都大约有 10,000,000 倍。
一个人可以在一分钟内训练 2022 个 SOTA 模型,而且是在他们的个人电脑上作为一个周末娱乐项目来训练。
今天的模型并不是最优化的,只是改变了模型的一些细节、损失函数、增强或者可以将误差降低一半的优化器。
我们的数据集太小了,通过扩大数据集可以获得适度的收益。
如果不扩大计算机基础设施和投资相应规模的高效训练模式的研发,就不可能取得进一步的收益。

点个在看 paper不断!