
图神经网络概述:Graph Neural Networks
https://distill.pub/2021/gnn-intro/
https://distill.pub/2021/understanding-gnns/
讲图神经网络(GNN)之前,先介绍一下什么是graph,为什么需要graph,以及graph有什么问题,然后介绍一下如何用GNN处理graph问题,最后从GNN推广到GCN。
Graph
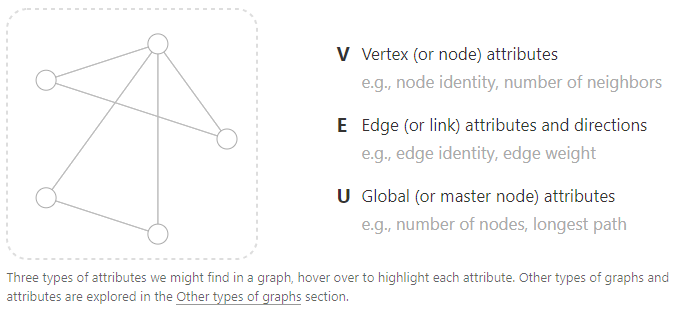
图由Vertex(V)、Edge(E)和Global(U)三部分构成。V可以表示为node identity或者number of neighbors,E可以表示为edge identity或者edge weight,U可以表示为number of nodes或者longest path。
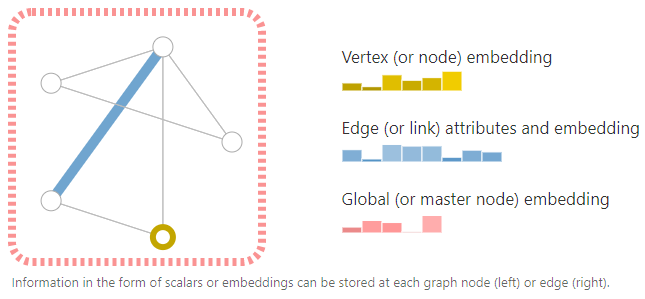
为了进一步描述每一个node、edge和entire graph,可以把信息存储在graph的每个部分中。其实就是把信息以embedding的方式存储。
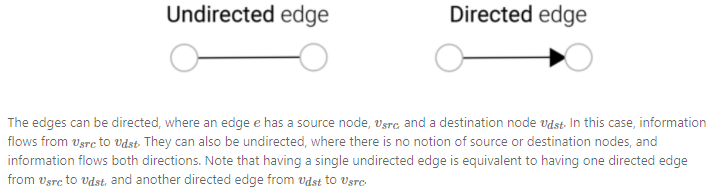
还可以通过edge的方向性(有向的、无向的)来构建特殊的图。
Graphs and where to find them
graph data在生活中无处不在,比如最常见的image和text都可以认为是graph data的一种特例,还有其他一些场景也可以用graph data表达。
Images as graphs
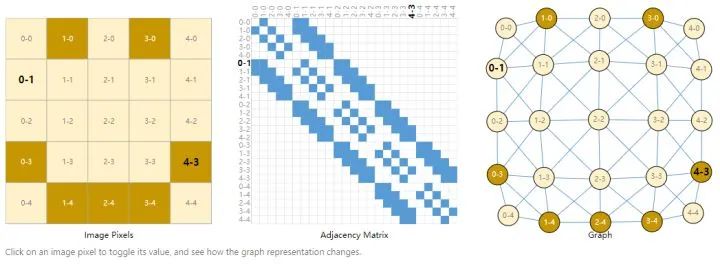
图片的位置可以表示成(列数-行数)的形式,将图片构建成adjacency matrix,蓝色块表示pixel和pixel之间相临,无方向性,画成graph就是右边图片的形式。
Text as graphs
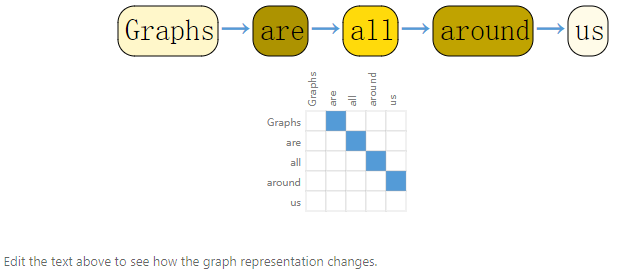
文本也可以构建成adjacency matrix,跟图片不一样的是,文本是一个有向图,每个词只跟前一个词相连接,并且有方向性。
其他还有比如分子、社交网络、学术引用网络等等都可以构建成graph。
What types of problems have graph structured data?
graph可以处理graph-level、node-level和edge-level三种层面的问题。
Graph-level task
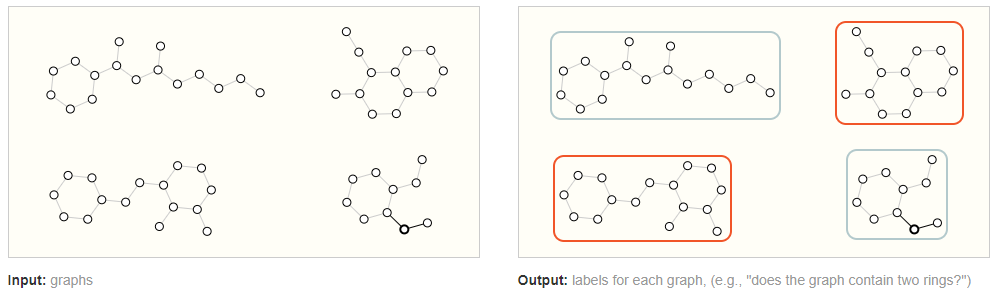
输入graph,输出整个graph的类别。在图像中,和图像分类任务类似;在文本中,和句子情感分析类似。
Node-level task
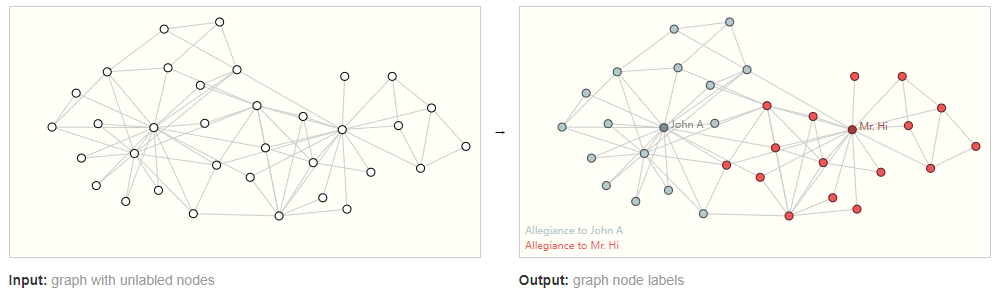
输入node不带类别的graph,输出每个node的类别。在图像中,和语义分割类似;在文本中,和词性分类类似。
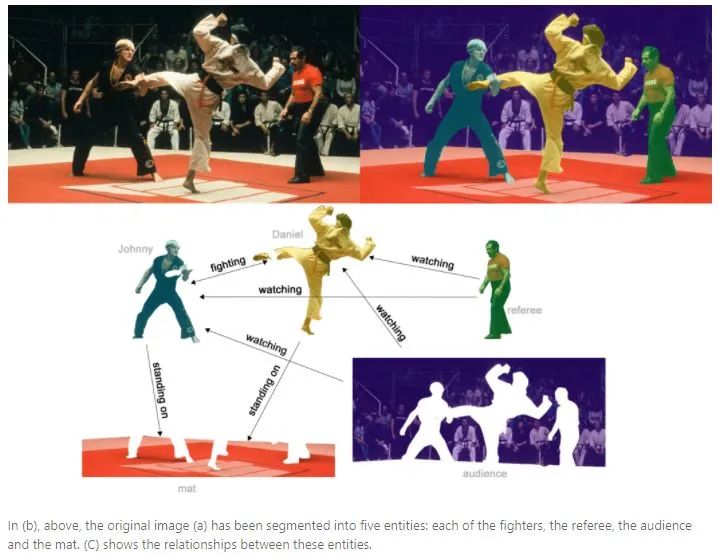
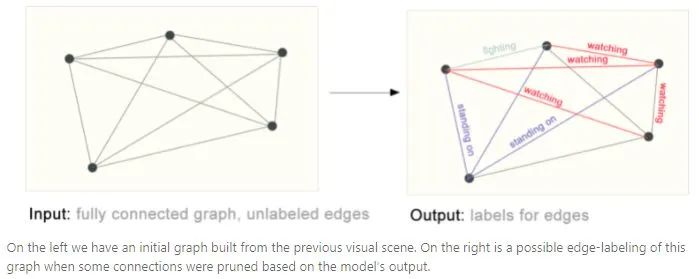
Edge-level task
edge-level任务用来预测node之间的相互关系。如下图所示,先将不同部分分割出来,然后判断不同部分的相互关系。构建成graph就是对edge进行类别预测。
The challenges of using graphs in machine learning
如何用神经网络处理graph任务呢?
第一步是考虑如何表示和神经网络相兼容的图。graph最多有4种想要预测的信息:node、edge、global-context和connectivity。前3个相对容易,比如可以用一个
还有一个问题是,许多邻接矩阵可以编码相同的连通性,但是不能保证这些不同的矩阵在神经网络中会产生相同的结果(也就是说,它们不是置换不变的)。
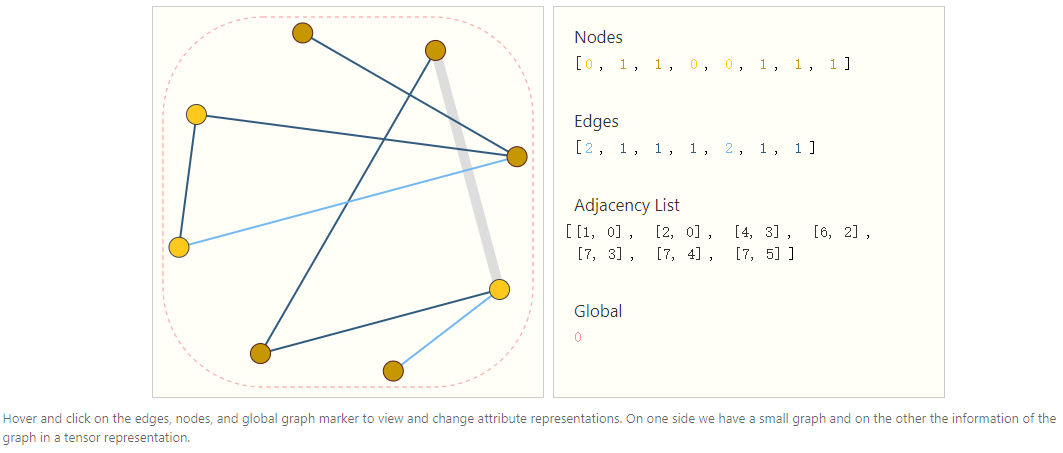
一种优雅而高效表示稀疏矩阵的方法是用邻接表。edge
以一个graph的邻接表为例,如下图所示:
Graph Neural Networks
通过上面的描述,graph可以通过置换不变的邻接表表示,那么可以设计一个graph neural networks(GNN)来解决graph的预测任务。
The simplest GNN
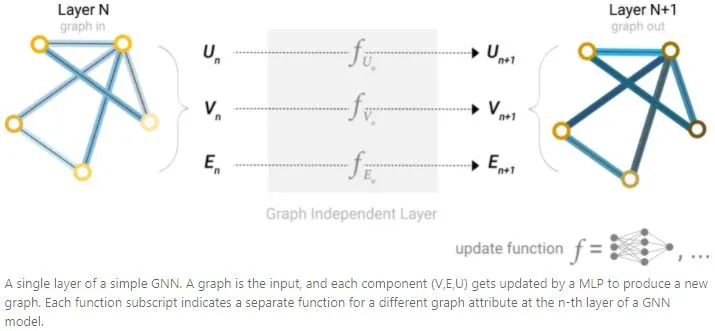
从最简单的GNN开始,更新所有graph的属性(nodes(V),edges(E),global(U))作为新的embedding,但是不使用graph的connectivity。
GNN对graph的每个组件分开使用MLP,称为GNN layer。对于每个node vetor,使用MLP后返回一个learned node-vector,同理edge会返回一个learned edge embedding,global会返回一个global embedding。
和CNN类似,GNN layer可以堆叠起来组成GNN。由于GNN layer不更新输入graph的connectivity,所有输出graph的邻接表跟输入图相同。但是通过GNN layer,node、edge和global-context的embedding已经更新。
GNN Predictions by Pooling Information
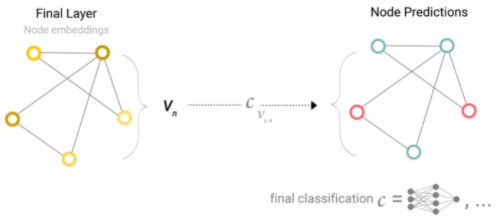
如果想用GNN做二分类任务,那么可以用一个linear classifier对graph进行分类。
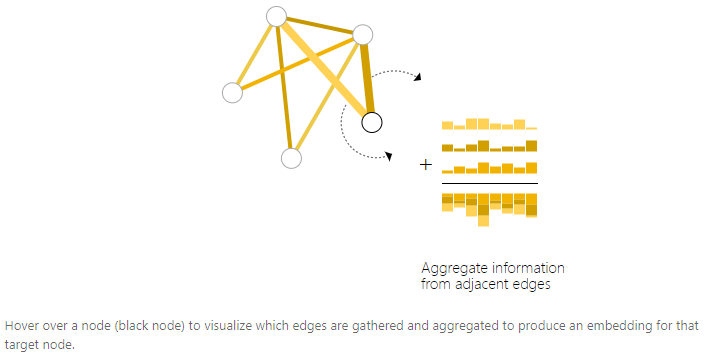
然而,有时候信息只储存在edge中,那么就需要从edge收集信息转移到node用于预测,这个过程称之为pooling。
Pooling过程有两个步骤:
1.对于要pooling的每一项(上图一行中的一列),收集它们的embedding并且concat到一个矩阵中(上图中的一行)。
2.收集的embedding通过求和操作进行聚合。
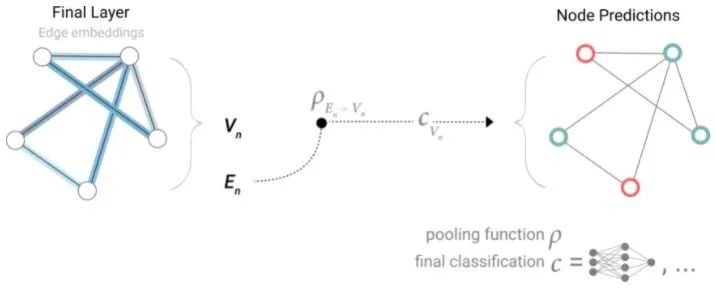
因此,如果只有edge-level的特征,可以通过pooling传递信息来预测node(上图虚线表示pooling传递信息给node,然后进行二分类)。
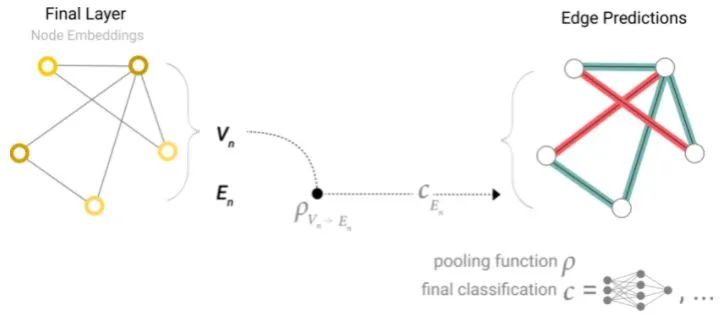
同理,如果只有node-level的特征,可以通过pooling传递信息来预测edge。类似CV中的global average pooling。
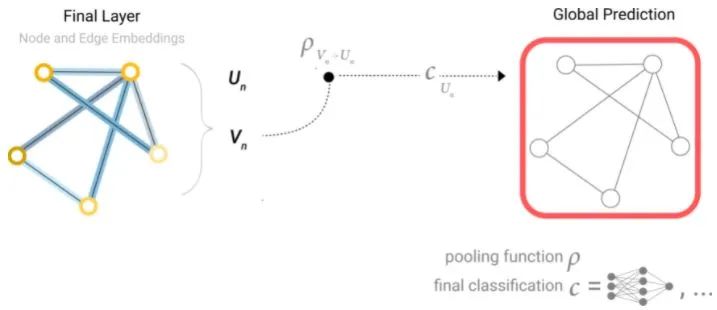
同理,可以通过node-level的特征预测global。
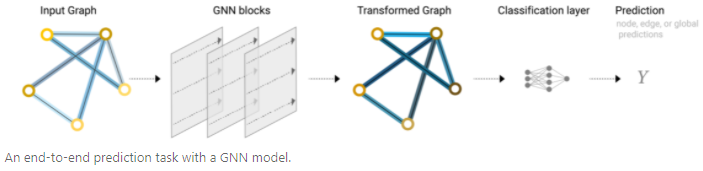
和CNN类似,通过GNN blocks可以构建出一个end-to-end的GNN。
需要注意的是,在这个最简单的GNN中,没有在GNN layer使用graph的connectivity。每个node、每个edge以及global-context都是独立处理的,只在聚合信息进行预测的时候使用了connectivity。
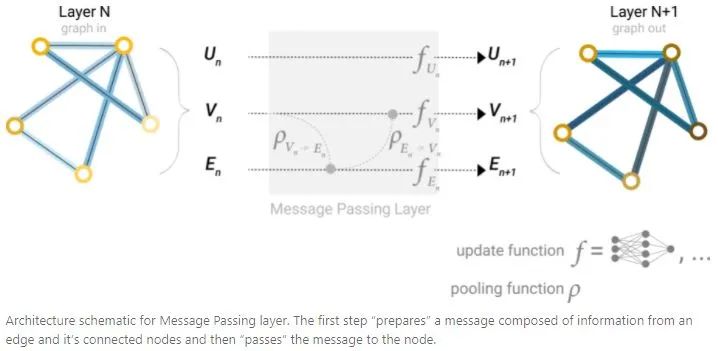
Passing messages between parts of the graph
为了使learned embedding感知到graph的connectivity,可以在GNN layer使用pooling构建出更加复杂的GNN(和convlution类似)。可以使用message passing实现,相邻node或者edge可以交换信息,并且影响彼此的embedding更新。
Message passing过程有三个步骤:
1.对于graph的每个node,收集所有相邻node的embedding。
2.通过相加操作聚合所有message。
3.所有聚合的message都通过一个update function传递(通常使用一个可学习的神经网络)。
这些步骤是利用graph的connectivity的关键。在GNN layer中构建更精细的message passing变体,可以获得表达和能力更强的GNN模型。
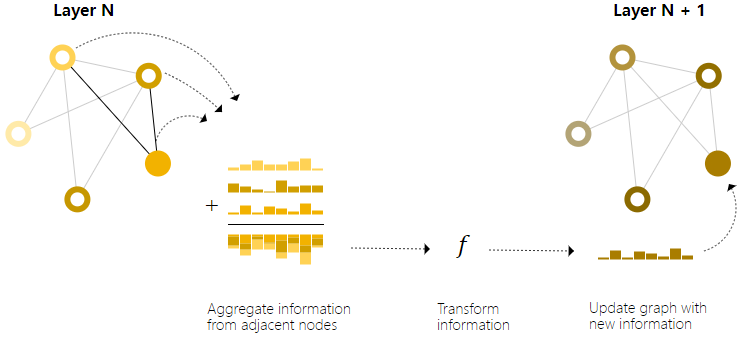
通过堆叠的message passing GNN layer,一个node可以引入整个graph的信息:在三层GNN layer之后,一个node可以获得3步远的node信息。
对最简单的GNN范式进行更新,增加一个message passing操作:
Learning edge representations
通过meassage passing,可以在GNN layer的node和edge之间共享信息。可以像之前使用相邻node信息一样,先将edge信息pooling,然后用update function转化并且存储,从而聚合来自相邻edge的信息。
然而,存储在graph中的node和edge信息不一定具有相同的大小或形状,因此不能立刻知道如何将它们组合起来。一种方法是学习从node空间到edge空间的线性映射,或者,可以在update function之前将它们concat在一起。
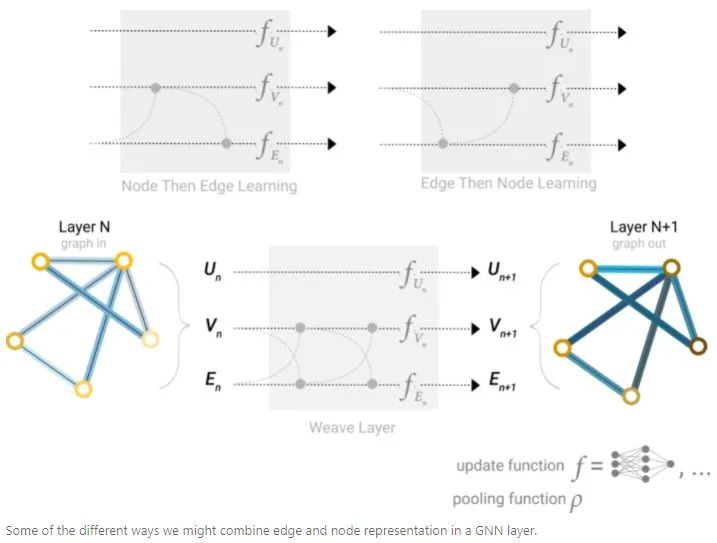
在构造GNN时,需要设计更新哪些graph属性以及更新顺序。比如可以使用weave的方式进行更新,node to node(linear),edge to edge(linear),node to edge(edge layer),edge to node(node layer)。
Adding global representations
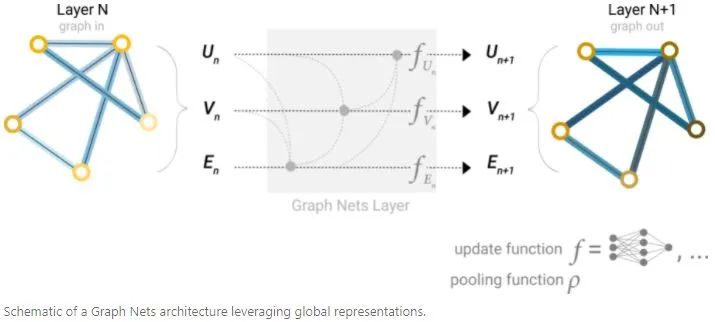
上面描述的GNN模型还有一个缺陷:在graph中,距离很远的node无法有效的传递信息,对于一个node,如果有k个layer,那么信息传递的距离最多是k步,这对于依赖相距很远的node信息的预测任务来说,是比较严重的问题。一种解决办法是让所有node可以相互传递信息,但是对于大的graph来说,计算量会非常昂贵。另一种解决办法是使用graph(U)的全局表示,称为master node或者context vector。这个全局的context vector可以连接到网络的所有node和edge,可以作为它们之间信息传递的桥梁,构建出一个graph的整体表示。
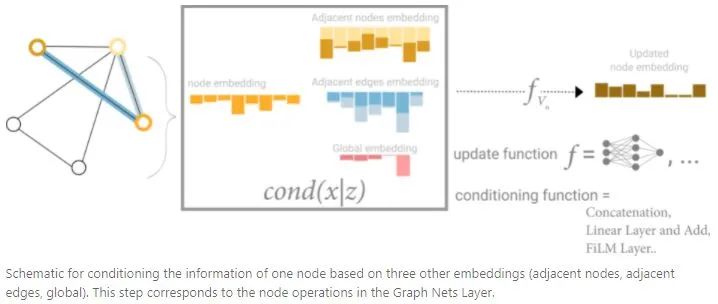
从这个角度看,所有graph属性都可以通过将感兴趣的属性和其他属性关联,然后在pooling过程中利用起来。比如对于一个node,可以同时考虑相邻的node、edge和global信息,然后通过concat将它们关联起来,最后通过线性映射将它们映射到相同特征空间中。
The Challenges of Computation on Graphs
graph在计算中有三个挑战:lack of consistent structure、node-order equivariance和scalability。
Lack of Consistent Structure
graph是极其灵活的数学模型,同时这意味着它们缺乏跨实例的一致结构。比如不同分子之间有不同的结构。用一种可以计算的格式来表示graph并不是一件简单的事情,graph的最终表示通常由实际问题决定。
Node-Order Equivariance
graph的node之间通常没有内在的顺序,相比之下,在图像中,每个像素都是由其在图像中的绝对位置唯一决定的。因此,我们希望我们的算法是节点顺序不变的:它们不应该依赖于graph中node的顺序。如果我们以某种方式对node进行排列,则由算法计算得到的node表示也应该以同样的方式进行排列。
Scalability
graph可以非常大,像Facebook和Twitter这样的社交网络,它们拥有超过10亿的用户,对这么大的数据进行操作并不容易。幸运的是,大多数自然出现的graph都是“稀疏的”:它们的边数往往与顶点数成线性关系。graph的稀疏性导致可以使用特殊的方法有效计算graph中node的表示。另外,和graph的数据量相比,这些方法的参数要少得多。
Problem Setting and Notation
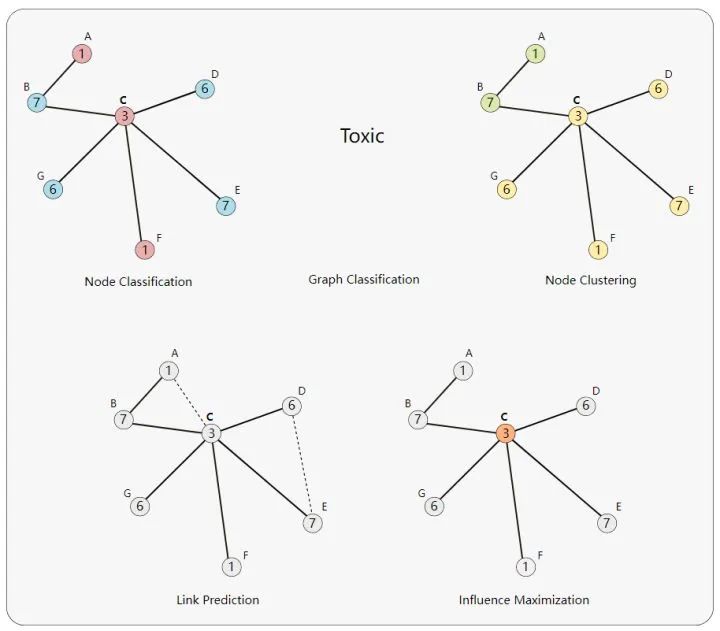
许多问题都可以用graph来表示:
Node Classification: 对单个节点进行分类。
Graph Classification: 对整个图进行分类。
Node Clustering: 根据连接性将相似的节点分组。
Link Prediction: 预测缺失的链接。
Influence Maximization: 识别有影响的节点。
Extending Convolutions to Graphs
卷积神经网络在图像中提取特征方面是非常强大的。而图像本身可以看作是一种非常规则的网格状结构的图,其中单个像素为节点,每个像素处的RGB通道值为节点特征。
因此,将卷积推广到任意的graph是一个很自然的想法。然而,普通卷积不是节点顺序不变的,因为它们依赖于像素的绝对位置。graph可以通过执行某种填充和排序,保证每个节点的邻域结构一致性,但是还有更加普遍和强大的方法来处理这个问题。
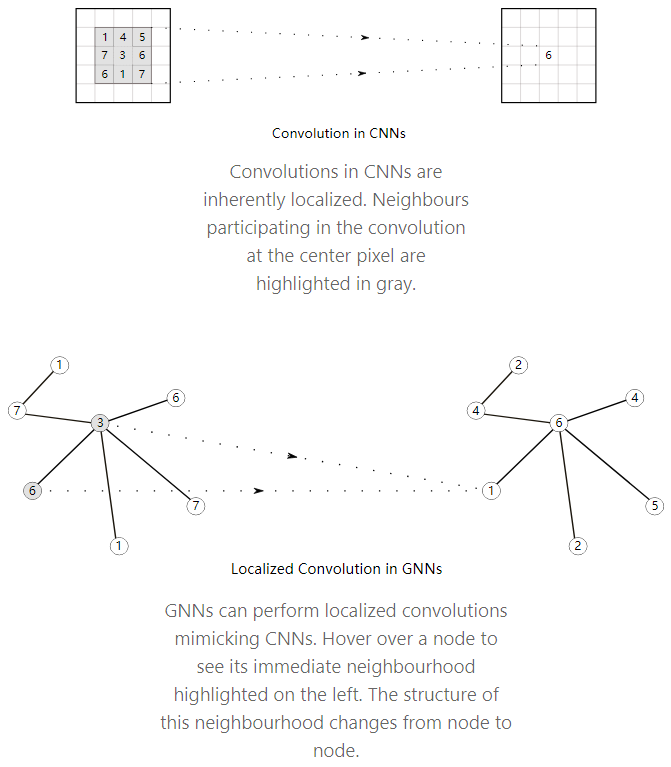
下面首先介绍一下在节点邻域上构造多项式滤波器的方法,这和CNN在相邻像素上滤波类似。然后介绍更多最新的方法如何用更强大的机制扩展这个想法。
Polynomial Filters on Graphs
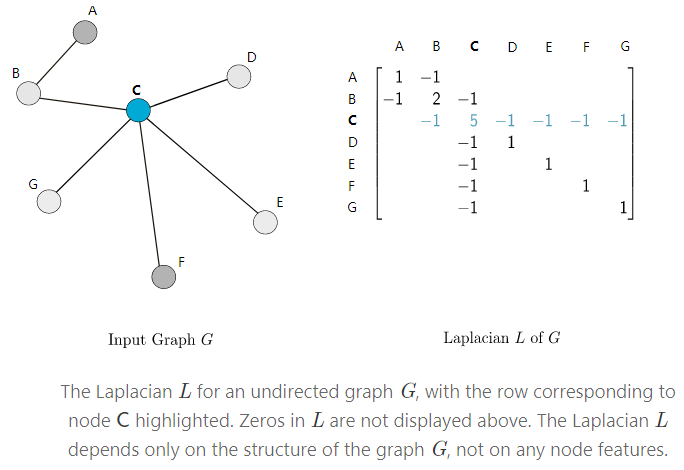
The Graph Laplacian
给定一个graph G,用A来表示数值为0或者1的邻接矩阵,用D表示对角度矩阵(矩阵对角线数值表示与行node相邻node的数量),那么
Polynomials of the Laplacian
Laplacian的多项式可以表示为:
这些多项式可以认为和CNN中“filters”等价,而系数w是“filters”的权重。
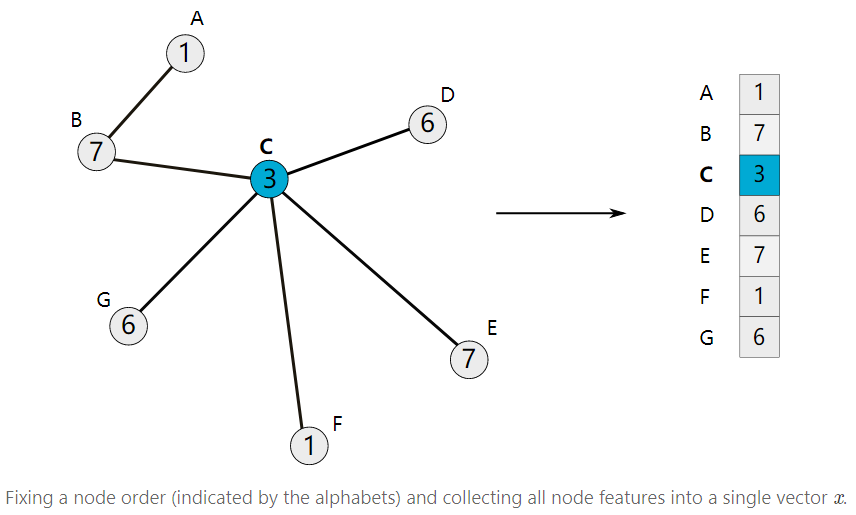
为了方便讨论,下面考虑节点只有一维特性的情况(每个节点是一个数值)。使用前面选择的节点顺序,我们可以将所有节点特征堆在一起得到一个x向量。
通过构造的特征向量x,可以定义它和多项式滤波器
关于Laplacian矩阵如何作用在x上的解释,参照https://distill.pub/2021/understanding-gnns/。
ChebNet
ChebNet对多项式滤波器公式进行了改进:
其中
Embedding Computation
下面介绍一下如何堆叠带非线性的ChebNet(或者任何多项式过滤器) layer构建成一个GNN,就像标准的CNN一样。假设有K个不同的多项式过滤器层,
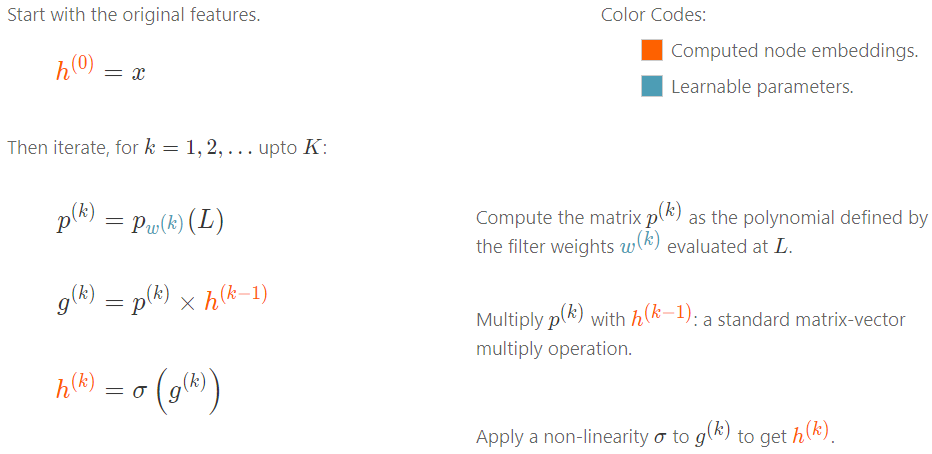
GNN和CNN计算方式类似,将输入作为初始features,然后计算多项式过滤器,然后和输入特征进行矩阵相乘,最后用非线性函数进行非线性变换,循环迭代K次。
需要注意的是,GNN在不同的节点上过滤器权重参数共享,和CNN类似,CNN的卷积在不同位置也是参数共享的。
Modern Graph Neural Networks
ChebNet是graph中学习局部过滤器的一个突破,它激发了许多人从不同的角度思考图卷积。
多项式过滤器对x卷积可以展开为:
这其实是一个1步局部卷积(也就是只跟直接相连的node卷积),可以看成由两个步骤产生:
1.聚合直接相邻的特征
2.结合node自身的特征
通过确保聚合是node-order equivariant,来保证整个卷积是node-order equivariant。
这些卷积可以被认为是相邻节点之间的“message passing”:在每一步之后,每个节点从它的相邻节点接收信息。
通过迭代重复K次1步局部卷积,感受野为K步远的所有node。
Embedding Computation
Message-passing形成了很多GNN模型的backbone。下面介绍一些流行的GNN模型:
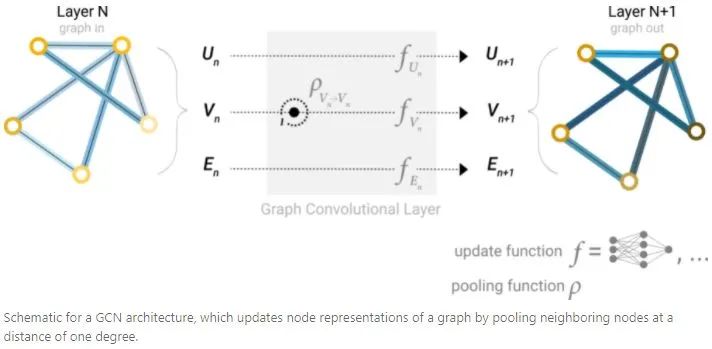
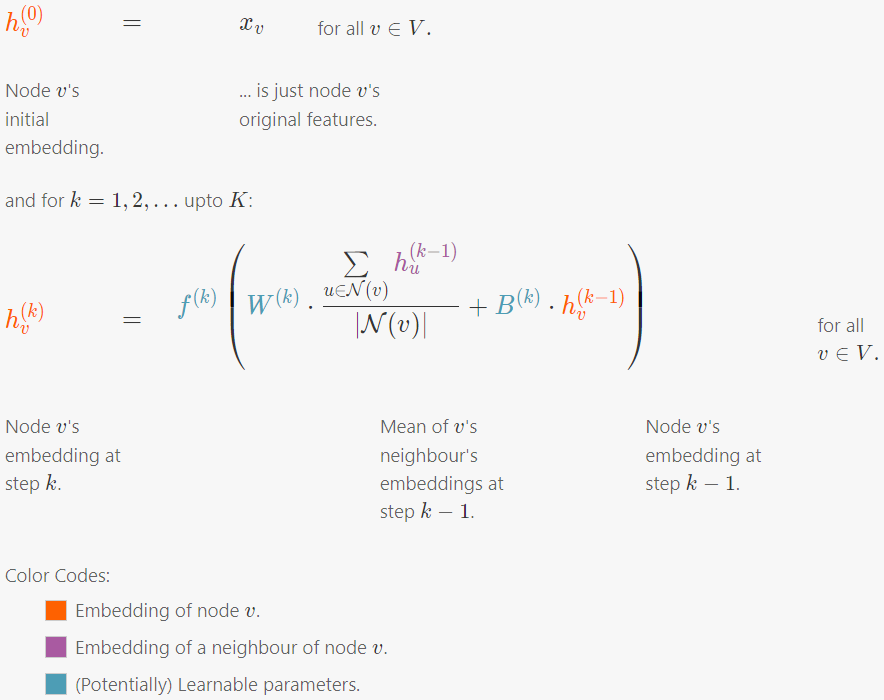
Graph Convolutional Networks (GCN)
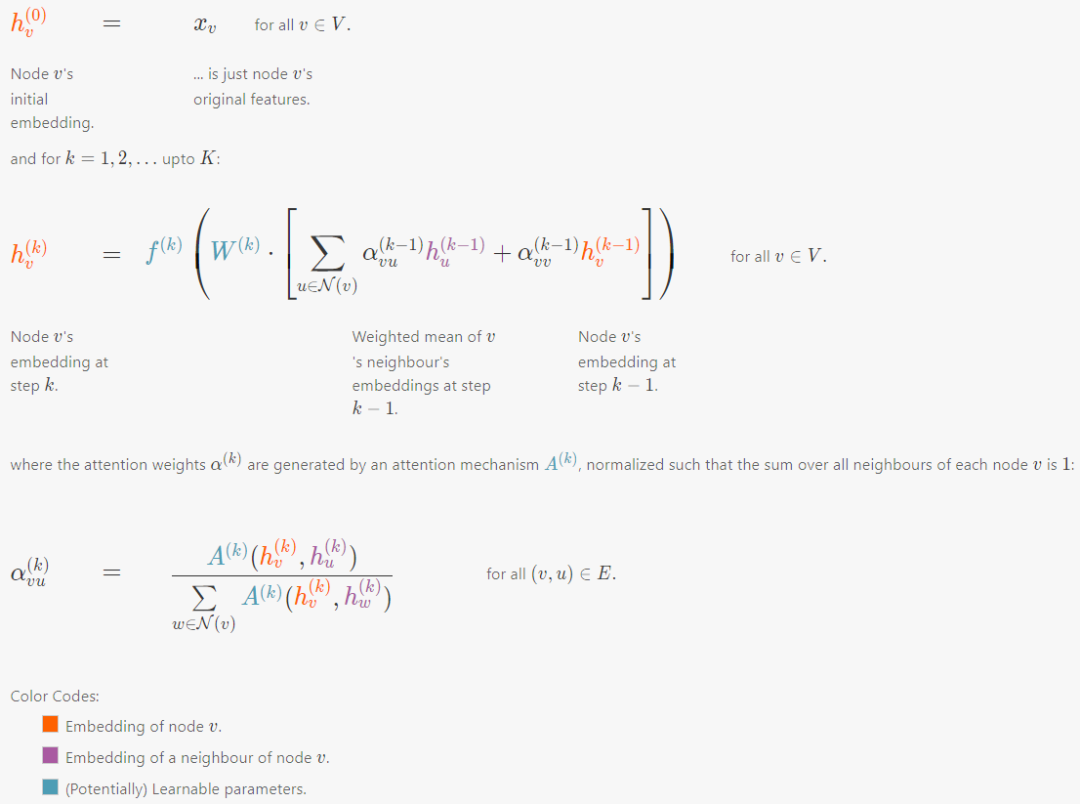
Graph Attention Networks (GAT)
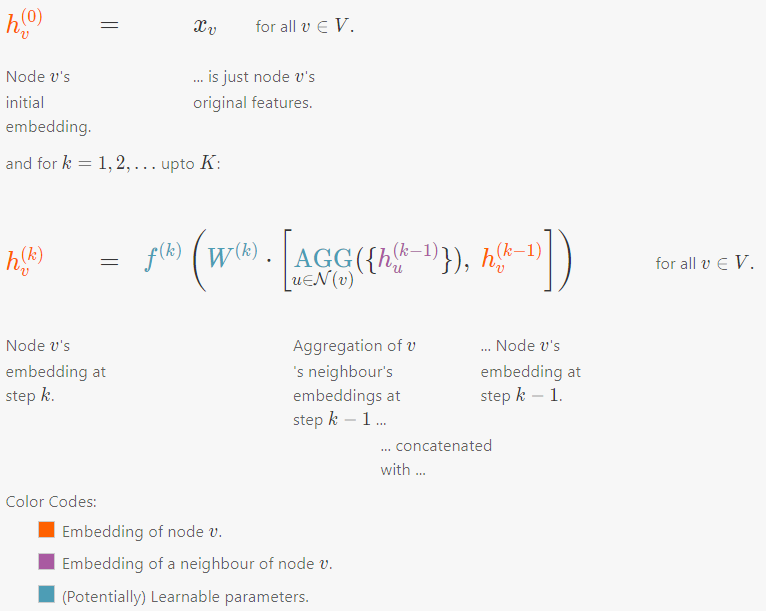
Graph Sample and Aggregate (GraphSAGE)
Graph Isomorphism Network (GIN)
GCN
GAT
GraphSAGE
GIN
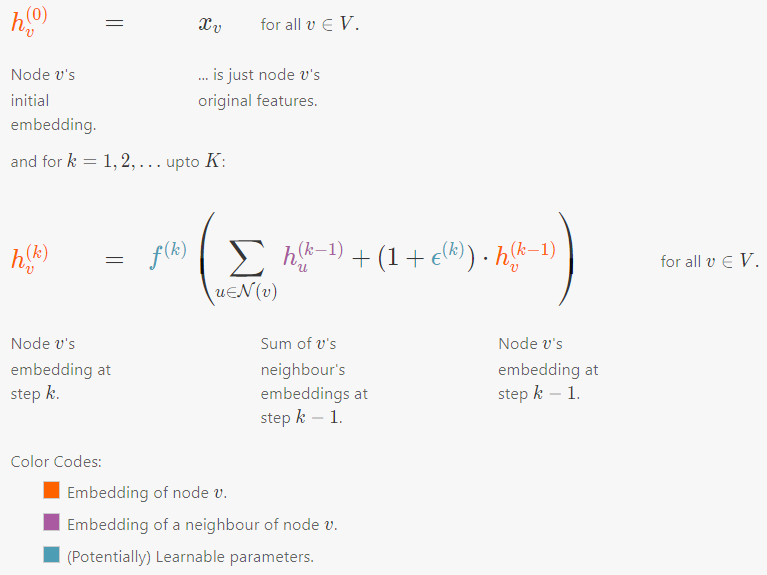
比较一下GCN、GAT、GraphSAGE和GIN的形式,主要差别就在于如何聚合信息和如何传递信息。
Conclusion
本文只是简单介绍了一下GNN和GCN的一些变体,但图神经网络的领域是极其广阔的。下面提一下一些可能感兴趣的点:
GNNs in Practice:如何提高GNN的效率、GNN的正则化技术
Different Kinds of Graphs:Directed graphs、Temporal graphs、Heterogeneous graphs
Pooling:SortPool、DiffPool、SAGPool
往期精彩回顾 本站qq群554839127,加入微信群请扫码: