
自动驾驶中车辆和车路协同的具体技术
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

本文转自:计算机视觉联盟
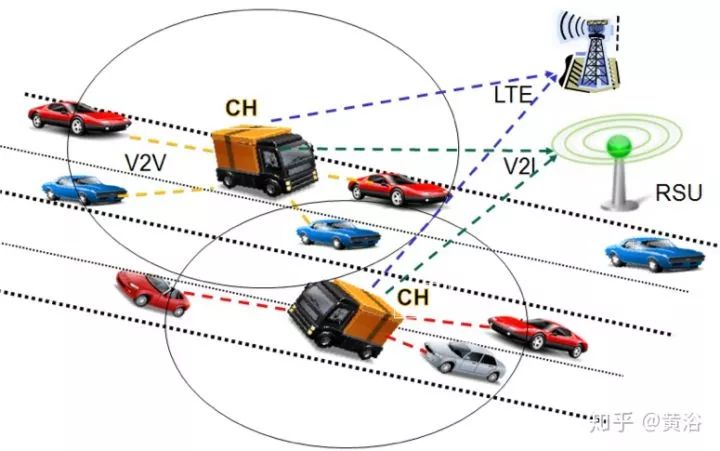
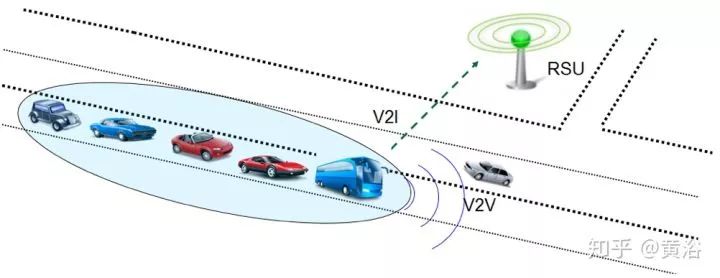
从自动驾驶的的单车(single agent)智能过渡到车辆/车路协同的多智体(multi-agent)智能,也是车联网和智慧城市/交通的优势,下面列一些供阅读的有关文献。
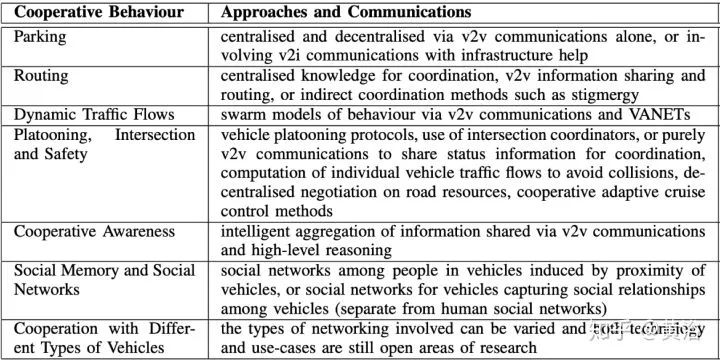
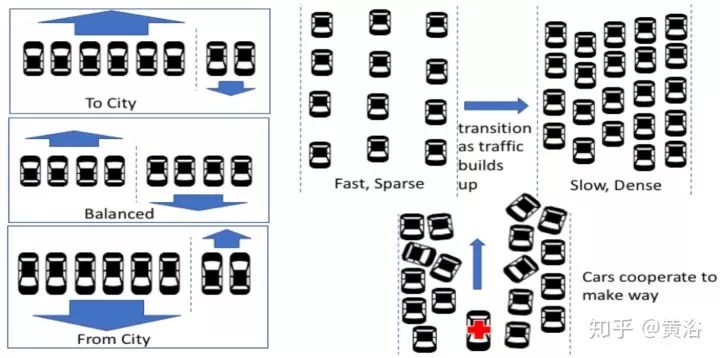
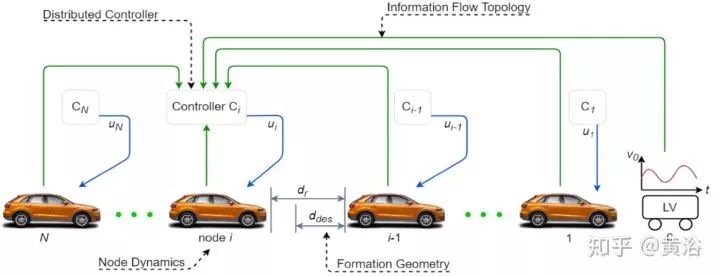
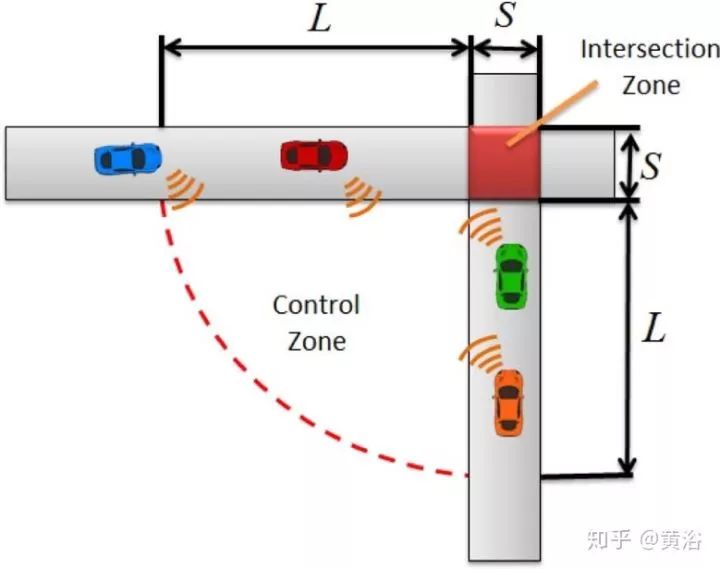
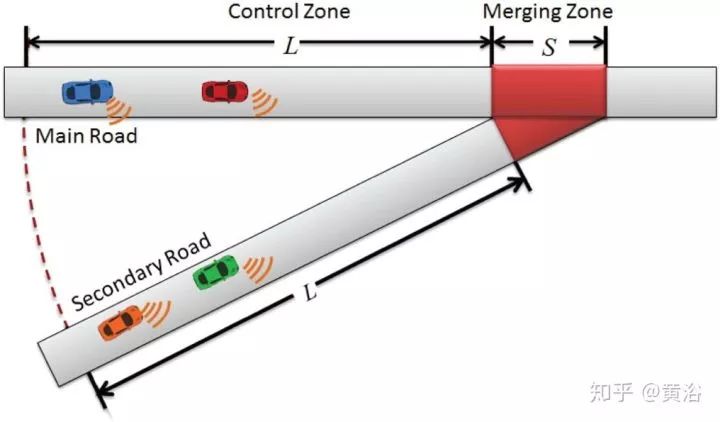
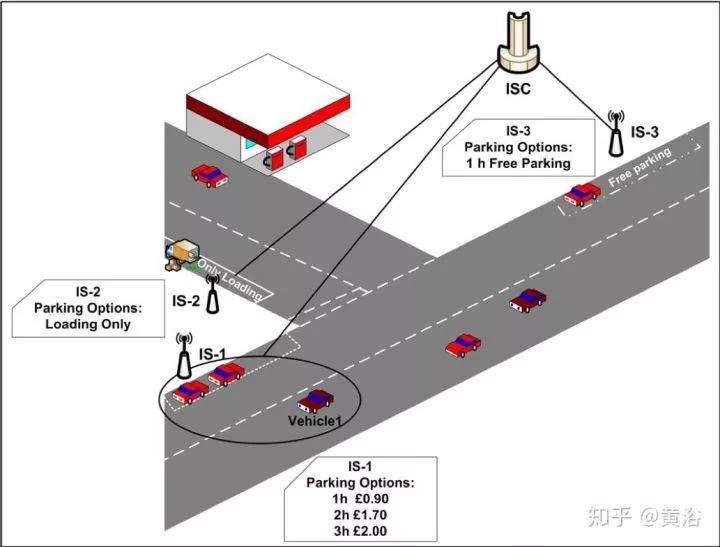
Parking (泊车)and Routing(路径); Swarm Behaviors (群行为)for Dynamic Traffic Flows; Platooning(车队), Intersections (路口)and Safety(安全); Cooperative awareness(协同觉察); Long Term Cooperation (长期合作)- Social Networks and Social Memory;
Scales (尺度规模); Trusted communication and deception proofing (可信通信和欺诈确认); Standards(标准); How Should Vehicles Talk to Each Other and with the Infrastructure(交谈)? Context-Aware Decision-Making and Regulations(决策和规章); Lawful interaction (合法的交互)。
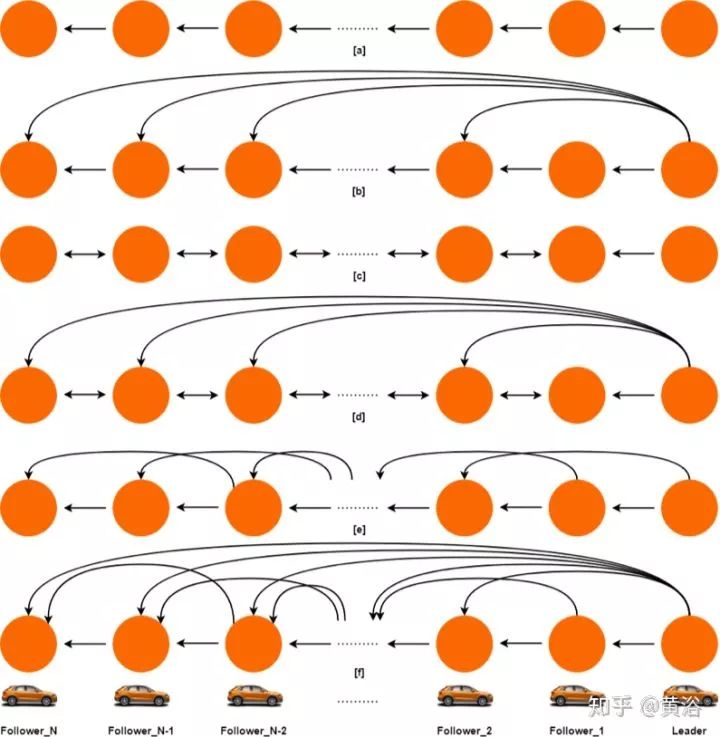
Alignment 对齐(指向同一方向); Synchronization 同步(同一个时间); Distributed Estimation 分布式估计(同一个估计/测量分配量); Rendezvous 会合(在同一个点碰头)。
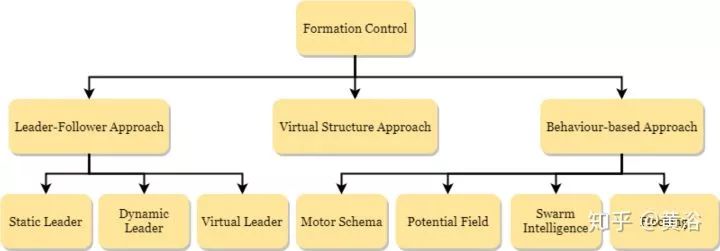
实现高精度控制的能力; 通过保持编队,在机器人故障期间具有固有的容错能力; 无需选举领导机器人; 无需修改即可针对不同种类的虚拟结构进行重新配置; 可以以分布式方式实施,而不会如集中式实施那样增加通信开销。 没有明确的功能分解。


交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论