
ResNet在计算机视觉中的应用
点击下方“AI算法与图像处理”,一起进步!
重磅干货,第一时间送达
2.数据预处理
import tensorflow as tf
from tensorflow.keras.models import Model
from tensorflow.keras.layers import Layer, BatchNormalization, Conv2D, Dense, Flatten, Add, Dropout, BatchNormalization
import numpy as np
from tensorflow.keras.datasets import fashion_mnist
from tensorflow.keras.utils import to_categorical
import matplotlib.pyplot as plt
from sklearn.model_selection import train_test_split
from tensorflow.keras.preprocessing.image import ImageDataGenerator
import os
from tensorflow.keras import Input, layers
from tensorflow.keras.layers import Dense, Flatten, Conv2D, MaxPooling2D
import time
directory_train = "./simpsons_data_split/train/"
directory_test = "./simpsons_data_split/test/"
def get_ImageDataGenerator(validation_split=None):
image_generator = ImageDataGenerator(rescale=(1/255.),
validation_split=validation_split)
return image_generator
image_gen_train = get_ImageDataGenerator(validation_split=0.2)
def get_generator(image_data_generator, directory, train_valid=None, seed=None):
train_generator = image_data_generator.flow_from_directory(directory,
batch_size=32,
class_mode='categorical',
target_size=(128,128),
subset=train_valid,
seed=seed)
return train_generator
train_generator = get_generator(image_gen_train, directory_train, train_valid='training', seed=1)
validation_generator = get_generator(image_gen_train, directory_train, train_valid='validation')
Found 12411 images belonging to 19 classes.
Found 3091 images belonging to 19 classes.
def get_ImageDataGenerator_augmented(validation_split=None):
image_generator = ImageDataGenerator(rescale=(1/255.),
rotation_range=40,
width_shift_range=0.2,
height_shift_range=0.2,
shear_range=0.2,
zoom_range=0.1,
brightness_range=[0.8,1.2],
horizontal_flip=True,
validation_split=validation_split)
return image_generator
image_gen_train_aug = get_ImageDataGenerator_augmented(validation_split=0.2)
train_generator_aug = get_generator(image_gen_train_aug, directory_train, train_valid='training', seed=1)
validation_generator_aug = get_generator(image_gen_train_aug, directory_train, train_valid='validation')
Found 12411 images belonging to 19 classes.
Found 3091 images belonging to 19 classes.
target_labels = next(os.walk(directory_train))[1]
target_labels.sort()
batch = next(train_generator)
batch_images = np.array(batch[0])
batch_labels = np.array(batch[1])
target_labels = np.asarray(target_labels)
plt.figure(figsize=(15,10))
for n, i in enumerate(np.arange(10)):
ax = plt.subplot(3,5,n+1)
plt.imshow(batch_images[i])
plt.title(target_labels[np.where(batch_labels[i]==1)[0][0]])
plt.axis('off')

3.基准模型
def get_benchmark_model(input_shape):
x = Input(shape=input_shape)
h = Conv2D(32, padding='same', kernel_size=(3,3), activation='relu')(x)
h = Conv2D(32, padding='same', kernel_size=(3,3), activation='relu')(x)
h = MaxPooling2D(pool_size=(2,2))(h)
h = Conv2D(64, padding='same', kernel_size=(3,3), activation='relu')(h)
h = Conv2D(64, padding='same', kernel_size=(3,3), activation='relu')(h)
h = MaxPooling2D(pool_size=(2,2))(h)
h = Conv2D(128, kernel_size=(3,3), activation='relu')(h)
h = Conv2D(128, kernel_size=(3,3), activation='relu')(h)
h = MaxPooling2D(pool_size=(2,2))(h)
h = Flatten()(h)
h = Dense(128, activation='relu')(h)
h = Dropout(.5)(h)
output = Dense(target_labels.shape[0], activation='softmax')(h)
model = tf.keras.Model(inputs=x, outputs=output)
model.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
return model
benchmark_model = get_benchmark_model((128, 128, 3))
benchmark_model.summary()
Model: "model"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
input_1 (InputLayer) [(None, 128, 128, 3)] 0
_________________________________________________________________
conv2d_1 (Conv2D) (None, 128, 128, 32) 896
_________________________________________________________________
max_pooling2d (MaxPooling2D) (None, 64, 64, 32) 0
_________________________________________________________________
conv2d_2 (Conv2D) (None, 64, 64, 64) 18496
_________________________________________________________________
conv2d_3 (Conv2D) (None, 64, 64, 64) 36928
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (None, 32, 32, 64) 0
_________________________________________________________________
conv2d_4 (Conv2D) (None, 30, 30, 128) 73856
_________________________________________________________________
conv2d_5 (Conv2D) (None, 28, 28, 128) 147584
_________________________________________________________________
max_pooling2d_2 (MaxPooling2 (None, 14, 14, 128) 0
_________________________________________________________________
flatten (Flatten) (None, 25088) 0
_________________________________________________________________
dense (Dense) (None, 128) 3211392
_________________________________________________________________
dropout (Dropout) (None, 128) 0
_________________________________________________________________
dense_1 (Dense) (None, 19) 2451
=================================================================
Total params: 3,491,603
Trainable params: 3,491,603
Non-trainable params: 0
_________________________________________________________________
def train_model(model, train_gen, valid_gen, epochs):
train_steps_per_epoch = train_gen.n // train_gen.batch_size
val_steps = valid_gen.n // valid_gen.batch_size
earlystopping = tf.keras.callbacks.EarlyStopping(patience=3)
history = model.fit(train_gen,
steps_per_epoch = train_steps_per_epoch,
epochs=epochs,
validation_data=valid_gen,
callbacks=[earlystopping])
return history
train_generator = get_generator(image_gen_train, directory_train, train_valid='training')
validation_generator = get_generator(image_gen_train, directory_train, train_valid='validation')
history_benchmark = train_model(benchmark_model, train_generator, validation_generator, 50)
Found 12411 images belonging to 19 classes.
Found 3091 images belonging to 19 classes.
Epoch 1/50
387/387 [==============================] - 139s 357ms/step - loss: 2.7674 - accuracy: 0.1370 - val_loss: 2.1717 - val_accuracy: 0.3488
Epoch 2/50
387/387 [==============================] - 136s 352ms/step - loss: 2.0837 - accuracy: 0.3757 - val_loss: 1.7546 - val_accuracy: 0.4940
Epoch 3/50
387/387 [==============================] - 130s 335ms/step - loss: 1.5967 - accuracy: 0.5139 - val_loss: 1.3483 - val_accuracy: 0.6102
Epoch 4/50
387/387 [==============================] - 130s 335ms/step - loss: 1.1952 - accuracy: 0.6348 - val_loss: 1.1623 - val_accuracy: 0.6619
Epoch 5/50
387/387 [==============================] - 130s 337ms/step - loss: 0.9164 - accuracy: 0.7212 - val_loss: 1.0813 - val_accuracy: 0.6907
Epoch 6/50
387/387 [==============================] - 130s 336ms/step - loss: 0.7270 - accuracy: 0.7802 - val_loss: 1.0241 - val_accuracy: 0.7240
Epoch 7/50
387/387 [==============================] - 130s 336ms/step - loss: 0.5641 - accuracy: 0.8217 - val_loss: 0.9674 - val_accuracy: 0.7438
Epoch 8/50
387/387 [==============================] - 130s 336ms/step - loss: 0.4496 - accuracy: 0.8592 - val_loss: 1.0701 - val_accuracy: 0.7441
Epoch 9/50
387/387 [==============================] - 130s 336ms/step - loss: 0.3677 - accuracy: 0.8758 - val_loss: 0.9796 - val_accuracy: 0.7645
Epoch 10/50
387/387 [==============================] - 130s 336ms/step - loss: 0.3041 - accuracy: 0.8983 - val_loss: 1.0681 - val_accuracy: 0.7561
4.ResNet
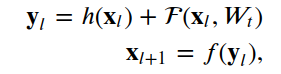


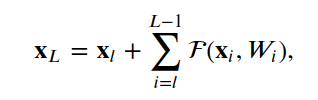




4.1残差单位
__init__, build和call。__init__方法使用定义的关键字参数调用基本层类初始值设定项。build方法创建层。在我们的例子中,我们定义了两组BatchNormalization,后面是Conv2D层,最后一组使用与层输入相同数量的滤波器。class ResidualUnit(Layer):
def __init__(self, **kwargs):
super(ResidualUnit, self).__init__(**kwargs)
def build(self, input_shape):
self.bn_1 = tf.keras.layers.BatchNormalization(input_shape=input_shape)
self.conv2d_1 = tf.keras.layers.Conv2D(input_shape[3], (3, 3), padding='same')
self.bn_2 = tf.keras.layers.BatchNormalization()
self.conv2d_2 = tf.keras.layers.Conv2D(input_shape[3], (3, 3), padding='same')
def call(self, inputs, training=False):
x = self.bn_1(inputs, training)
x = tf.nn.relu(x)
x = self.conv2d_1(x)
x = self.bn_2(x, training)
x = tf.nn.relu(x)
x = self.conv2d_2(x)
x = tf.keras.layers.add([inputs, x])
return x
test_model = tf.keras.Sequential([ResidualUnit(input_shape=(128, 128, 3), name="residual_unit")])
test_model.summary()
Model: "sequential"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
residual_unit (ResidualUnit) (None, 128, 128, 3) 192
=================================================================
Total params: 192
Trainable params: 180
Non-trainable params: 12
_________________________________________________________________
4.2增加维度的残差单元

class FiltersChangeResidualUnit(Layer):
def __init__(self, out_filters, **kwargs):
super(FiltersChangeResidualUnit, self).__init__(**kwargs)
self.out_filters = out_filters
def build(self, input_shape):
number_filters = input_shape[0]
self.bn_1 = tf.keras.layers.BatchNormalization(input_shape=input_shape)
self.conv2d_1 = tf.keras.layers.Conv2D(input_shape[3], (3, 3), padding='same')
self.bn_2 = tf.keras.layers.BatchNormalization()
self.conv2d_2 = tf.keras.layers.Conv2D(self.out_filters, (3, 3), padding='same')
self.conv2d_3 = tf.keras.layers.Conv2D(self.out_filters, (1, 1))
def call(self, inputs, training=False):
x = self.bn_1(inputs, training)
x = tf.nn.relu(x)
x = self.conv2d_1(x)
x = self.bn_2(x, training)
x = tf.nn.relu(x)
x = self.conv2d_2(x)
x_1 = self.conv2d_3(inputs)
x = tf.keras.layers.add([x, x_1])
return x
test_model = tf.keras.Sequential([FiltersChangeResidualUnit(16, input_shape=(32, 32, 3), name="fc_resnet_unit")])
test_model.summary()
Model: "sequential_1"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
fc_resnet_unit (FiltersChang (None, 32, 32, 16) 620
=================================================================
Total params: 620
Trainable params: 608
Non-trainable params: 12
_________________________________________________________________
4.3模型
class ResNetModel(Model):
def __init__(self, **kwargs):
super(ResNetModel, self).__init__()
self.conv2d_1 = tf.keras.layers.Conv2D(32, (7, 7), strides=(2,2))
self.resb = ResidualUnit()
self.conv2d_2 = tf.keras.layers.Conv2D(32, (3, 3), strides=(2,2))
self.filtersresb = FiltersChangeResidualUnit(64)
self.flatten_1 = tf.keras.layers.Flatten()
self.dense_o = tf.keras.layers.Dense(target_labels.shape[0], activation='softmax')
def call(self, inputs, training=False):
x = self.conv2d_1(inputs)
x = self.resb(x, training)
x = self.conv2d_2(x)
x = self.filtersresb(x, training)
x = self.flatten_1(x)
x = self.dense_o(x)
return x
resnet_model = ResNetModel()
resnet_model(inputs= tf.random.normal((32, 128,128,3)))
resnet_model.summary()
Model: "res_net_model"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d_6 (Conv2D) multiple 4736
_________________________________________________________________
residual_unit (ResidualUnit) multiple 18752
_________________________________________________________________
conv2d_7 (Conv2D) multiple 9248
_________________________________________________________________
filters_change_residual_unit multiple 30112
_________________________________________________________________
flatten_1 (Flatten) multiple 0
_________________________________________________________________
dense_2 (Dense) multiple 1094419
=================================================================
Total params: 1,157,267
Trainable params: 1,157,011
Non-trainable params: 256
_________________________________________________________________
optimizer_obj = tf.keras.optimizers.Adam(learning_rate=0.001)
loss_obj = tf.keras.losses.CategoricalCrossentropy()
@tf.function
def grad(model, inputs, targets, loss):
with tf.GradientTape() as tape:
preds = model(inputs)
loss_value = loss(targets, preds)
return loss_value, tape.gradient(loss_value, model.trainable_variables)
def train_resnet(model, num_epochs, dataset, valid_dataset, optimizer, loss, grad_fn):
train_steps_per_epoch = dataset.n // dataset.batch_size
train_steps_per_epoch_valid = valid_dataset.n // valid_dataset.batch_size
train_loss_results = []
train_accuracy_results = []
train_loss_results_valid = []
train_accuracy_results_valid = []
for epoch in range(num_epochs):
start = time.time()
epoch_loss_avg = tf.keras.metrics.Mean()
epoch_accuracy = tf.keras.metrics.CategoricalAccuracy()
epoch_loss_avg_valid = tf.keras.metrics.Mean()
epoch_accuracy_valid = tf.keras.metrics.CategoricalAccuracy()
i=0
for x, y in dataset:
loss_value, grads = grad_fn(model, x, y, loss)
optimizer.apply_gradients(zip(grads, model.trainable_variables))
epoch_loss_avg(loss_value)
epoch_accuracy(y, model(x))
if i>=train_steps_per_epoch:
break
i+=1
j = 0
for x, y in valid_dataset:
model_output = model(x)
epoch_loss_avg_valid(loss_obj(y, model_output))
epoch_accuracy_valid(y, model_output)
if j>=train_steps_per_epoch_valid:
break
j+=1
# End epoch
train_loss_results.append(epoch_loss_avg.result())
train_accuracy_results.append(epoch_accuracy.result())
train_loss_results_valid.append(epoch_loss_avg_valid.result())
train_accuracy_results_valid.append(epoch_accuracy_valid.result())
print("Training -> Epoch {:03d}: Loss: {:.3f}, Accuracy: {:.3%}".format(epoch,
epoch_loss_avg.result(),
epoch_accuracy.result()))
print("Validation -> Epoch {:03d}: Loss: {:.3f}, Accuracy: {:.3%}".format(epoch,
epoch_loss_avg_valid.result(),
epoch_accuracy_valid.result()))
print(f'Time taken for 1 epoch {time.time()-start:.2f} sec\n')
return train_loss_results, train_accuracy_results
train_loss_results, train_accuracy_results = train_resnet(resnet_model,
40,
train_generator_aug,
validation_generator_aug,
optimizer_obj,
loss_obj,
grad)
Training -> Epoch 000: Loss: 2.654, Accuracy: 27.153%
Validation -> Epoch 000: Loss: 2.532, Accuracy: 23.488%
Time taken for 1 epoch 137.62 sec
[...]
Training -> Epoch 039: Loss: 0.749, Accuracy: 85.174%
Validation -> Epoch 039: Loss: 0.993, Accuracy: 75.218%
Time taken for 1 epoch 137.56 sec
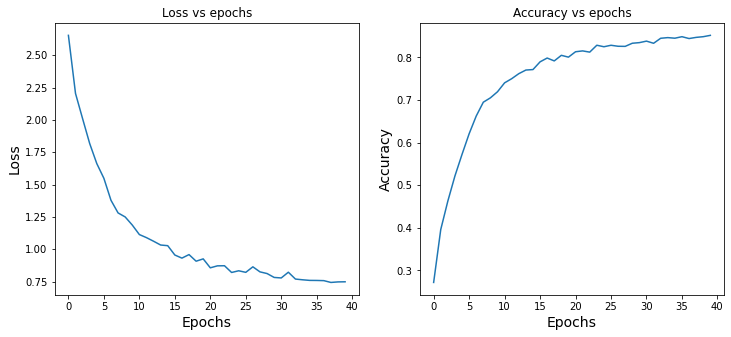
5.结果
fig, axes = plt.subplots(1, 2, sharex=True, figsize=(12, 5))
axes[0].set_xlabel("Epochs", fontsize=14)
axes[0].set_ylabel("Loss", fontsize=14)
axes[0].set_title('Loss vs epochs')
axes[0].plot(train_loss_results)
axes[1].set_title('Accuracy vs epochs')
axes[1].set_ylabel("Accuracy", fontsize=14)
axes[1].set_xlabel("Epochs", fontsize=14)
axes[1].plot(train_accuracy_results)
plt.show()
def test_model(model, test_generator):
epoch_loss_avg = tf.keras.metrics.Mean()
epoch_accuracy = tf.keras.metrics.CategoricalAccuracy()
train_steps_per_epoch = test_generator.n // test_generator.batch_size
i = 0
for x, y in test_generator:
model_output = model(x)
epoch_loss_avg(loss_obj(y, model_output))
epoch_accuracy(y, model_output)
if i>=train_steps_per_epoch:
break
i+=1
print("Test loss: {:.3f}".format(epoch_loss_avg.result().numpy()))
print("Test accuracy: {:.3%}".format(epoch_accuracy.result().numpy()))
print('ResNet Model')
test_model(resnet_model, validation_generator)
print('Benchmark Model')
test_model(benchmark_model, validation_generator)
ResNet Model
Test loss: 0.787
Test accuracy: 80.945%
Benchmark Model
Test loss: 1.067
Test accuracy: 75.607%
num_test_images = validation_generator.n
random_test_images, random_test_labels = next(validation_generator)
predictions = resnet_model(random_test_images)
fig, axes = plt.subplots(4, 2, figsize=(25, 12))
fig.subplots_adjust(hspace=0.5, wspace=-0.35)
j=0
for i, (prediction, image, label) in enumerate(zip(predictions, random_test_images, target_labels[(tf.argmax(random_test_labels, axis=1).numpy())])):
if j >3:
break
axes[i, 0].imshow(np.squeeze(image))
axes[i, 0].get_xaxis().set_visible(False)
axes[i, 0].get_yaxis().set_visible(False)
axes[i, 0].text(5., -7., f'Class {label}')
axes[i, 1].bar(np.arange(len(prediction)), prediction)
axes[i, 1].set_xticks(np.arange(len(prediction)))
axes[i, 1].set_xticklabels([l.split('_')[0] for l in target_labels], rotation=0)
pred_inx = np.argmax(prediction)
axes[i, 1].set_title(f"Categorical distribution. Model prediction: {target_labels[pred_inx]}")
j+=1
plt.show()

6.结论
7.参考引用
交流群
欢迎加入公众号读者群一起和同行交流,目前有美颜、三维视觉、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群
个人微信(如果没有备注不拉群!) 请注明:地区+学校/企业+研究方向+昵称
下载1:何恺明顶会分享
在「AI算法与图像处理」公众号后台回复:何恺明,即可下载。总共有6份PDF,涉及 ResNet、Mask RCNN等经典工作的总结分析
下载2:终身受益的编程指南:Google编程风格指南
在「AI算法与图像处理」公众号后台回复:c++,即可下载。历经十年考验,最权威的编程规范!
下载3 CVPR2021 在「AI算法与图像处理」公众号后台回复:CVPR,即可下载1467篇CVPR 2020论文 和 CVPR 2021 最新论文

评论