
揭秘三维视觉之结构光原理
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

知乎作者David LEE
线扫描结构光; 面阵结构光。
线扫描结构光较之面阵结构光较为简单,精度也比较高,在工业中广泛用于物体体积测量、三维成像等领域。
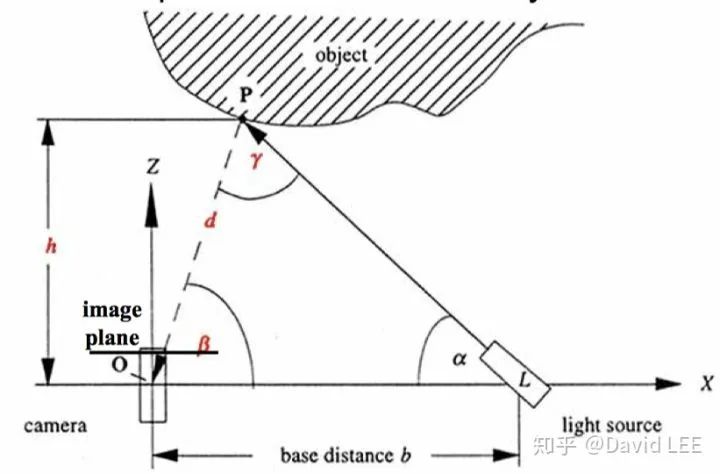


 为投影装置的朝向。
为投影装置的朝向。  则需要通过对应像素的像素坐标
则需要通过对应像素的像素坐标  和焦距f来确定。最终可知P点的三维坐标为:
和焦距f来确定。最终可知P点的三维坐标为:
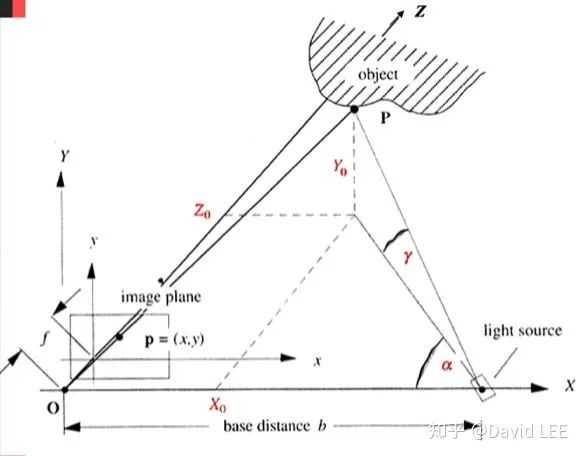




 并没有出现在公式中。
并没有出现在公式中。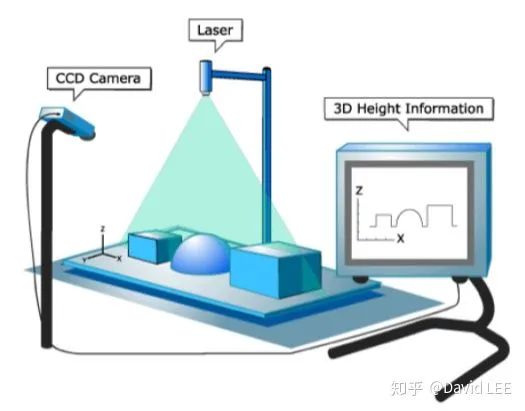



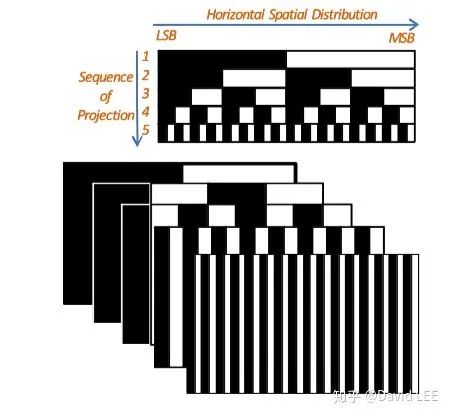
时序编码; 空间编码。
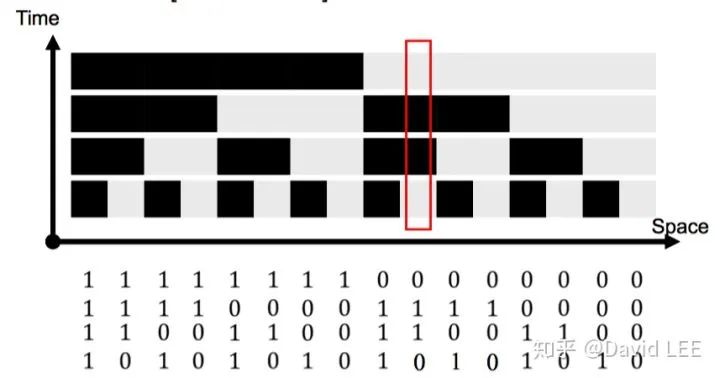
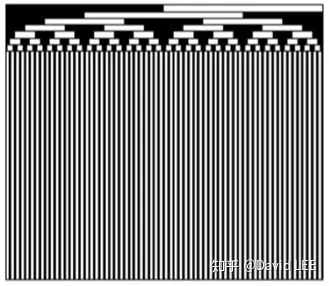
 个条带的影响。如下图中M = 3, N = 3时图中有27条条带。
个条带的影响。如下图中M = 3, N = 3时图中有27条条带。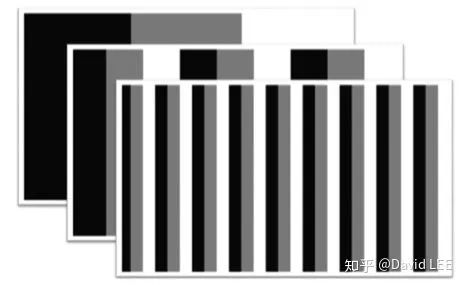
高精度;
只适用于静态场景; 需要拍摄大量影像。
为满足动态场景的需要,可以采用空间编码结构光。前面谈到了随机结构光,就是不带编码信息,投影随机纹理,而这里讨论的空间编码结构光特指向被测空间中投影经过数学编码的、一定范围内的光斑不具备重复性的结构光。由此,某个点的编码值可以通过其临域获得。其中,包含一个完整的空间编码的像素数量(窗口大小)就决定了重建的精度。
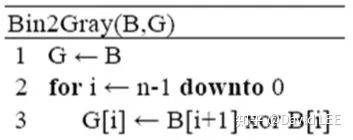
德布鲁因序列(维基百科)B(k, n) 表示用k个符号(如二进制,k = 2)来表示长度为  的循环编码,n为一个编码值的长度。
的循环编码,n为一个编码值的长度。
 的循环序列:[0, 0, 1, 1]。此时,我们得到4个长度为2的不同的编码:[0, 0], [0, 1], [1, 1], [1, 0].
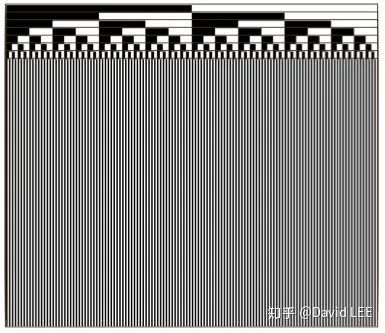
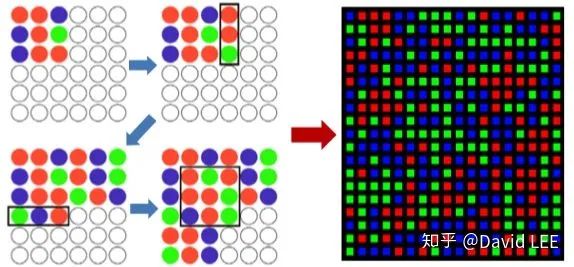
的循环序列:[0, 0, 1, 1]。此时,我们得到4个长度为2的不同的编码:[0, 0], [0, 1], [1, 1], [1, 0]. 种颜色组合,去除(0, 0, 0),还剩下7种颜色。因此k = 7, n = 3,这样就可以获得一个长度为343的条带序列。对于这个序列,唯一的约束为:相邻的条带不能为同样的颜色。否则对于解码算法来说很容易造成误差。下图展示了只使用5种颜色(k = 5, n = 3)的结构光序列:
种颜色组合,去除(0, 0, 0),还剩下7种颜色。因此k = 7, n = 3,这样就可以获得一个长度为343的条带序列。对于这个序列,唯一的约束为:相邻的条带不能为同样的颜色。否则对于解码算法来说很容易造成误差。下图展示了只使用5种颜色(k = 5, n = 3)的结构光序列: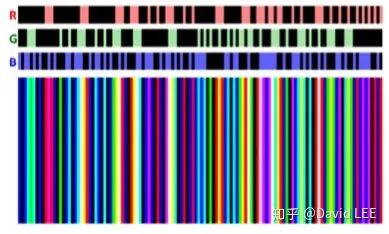

无需多张照片,只需要一对影像即可进行三维重建。可以满足实时处理,用在动态环境中。
易受噪声干扰:由于反光、照明等原因可能导致成像时部分区域等编码信息缺失; 对于空间中的遮挡比较敏感; 相较于时序编码结构光精度较低。
好消息,小白学视觉团队的知识星球开通啦,为了感谢大家的支持与厚爱,团队决定将价值149元的知识星球现时免费加入。各位小伙伴们要抓住机会哦!
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
评论