
CV基础:区域生长与分水岭算法
区域生长是一种串行区域分割的图像分割方法。区域生长是指从某个像素出发,按照一定的准则,逐步加入邻近像素,当满足一定的条件时,区域生长终止。区域生长的好坏决定于1.初始点(种子点)的选取。2.生长准则。3.终止条件。区域生长是从某个或者某些像素点出发,最后得到整个区域,进而实现目标的提取。
区域生长的原理
区域生长的基本思想是将具有相似性质的像素集合起来构成区域。具体先对每个需要分割的区域找一个种子像素作为生长起点,然后将种子像素和周围邻域中与种子像素有相同或相似性质的像素(根据某种事先确定的生长或相似准则来判定)合并到种子像素所在的区域中。将这些新像素当作新的种子继续上面的过程,直到没有满足条件的像素可被包括进来。这样一个区域就生长成了。
区域生长实现的步骤如下:
1. 对图像顺序扫描!找到第1个还没有归属的像素, 设该像素为(x0, y0);
2. 以(x0, y0)为中心, 考虑(x0, y0)的4邻域像素(x, y)如果(x0, y0)满足生长准则, 将(x, y)与(x0, y0)合并(在同一区域内), 同时将(x, y)压入堆栈;
3. 从堆栈中取出一个像素, 把它当作(x0, y0)返回到步骤2;
4. 当堆栈为空时!返回到步骤1;
5. 重复步骤1 - 4直到图像中的每个点都有归属时。生长结束。
这个过程中有几个关键的问题:
a> 给定种子点(种子点如何选取?)
种子点的选取很多时候都采用人工交互的方法实现,也有用其他方式的,比如寻找物体并提取物体内部点作为种子点。
b> 确定在生长过程中能将相邻像素包括进来的准则
灰度图像的差值;彩色图像的颜色等等。都是关于像素与像素间的关系描述。
c> 生长的停止条件
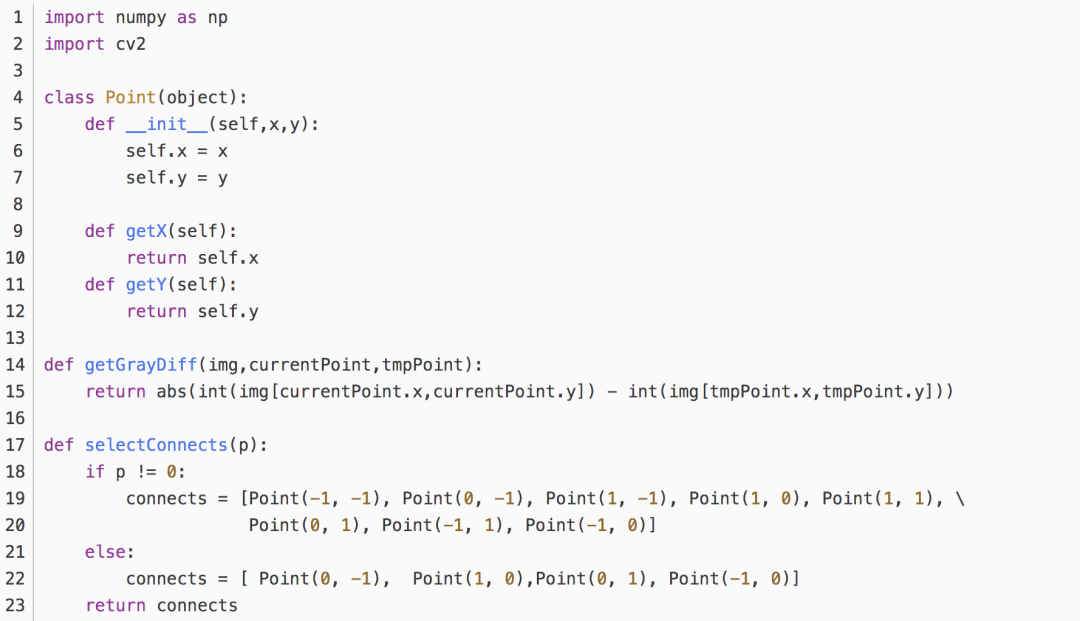
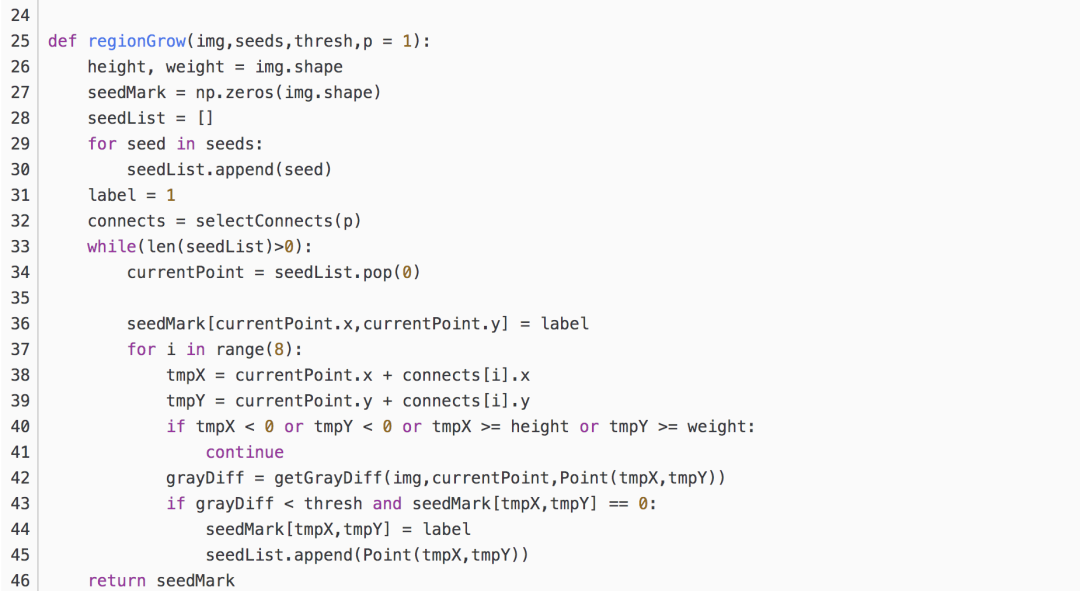
Python实现

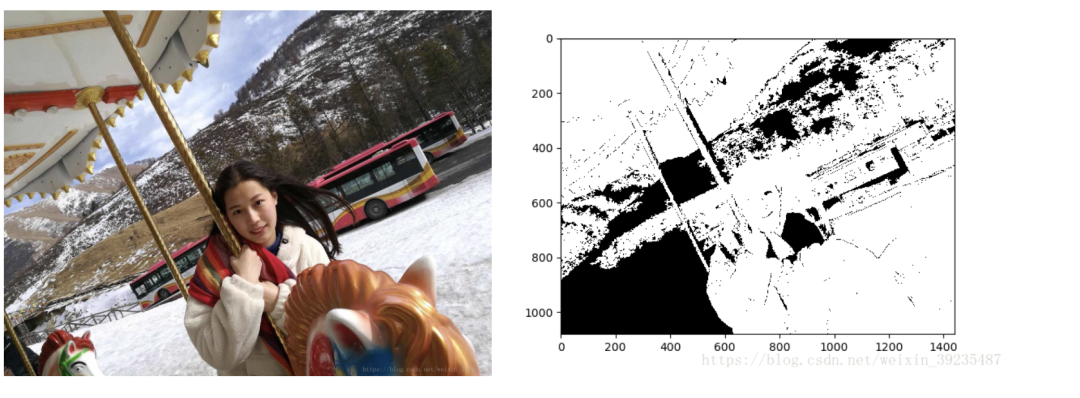
效果:
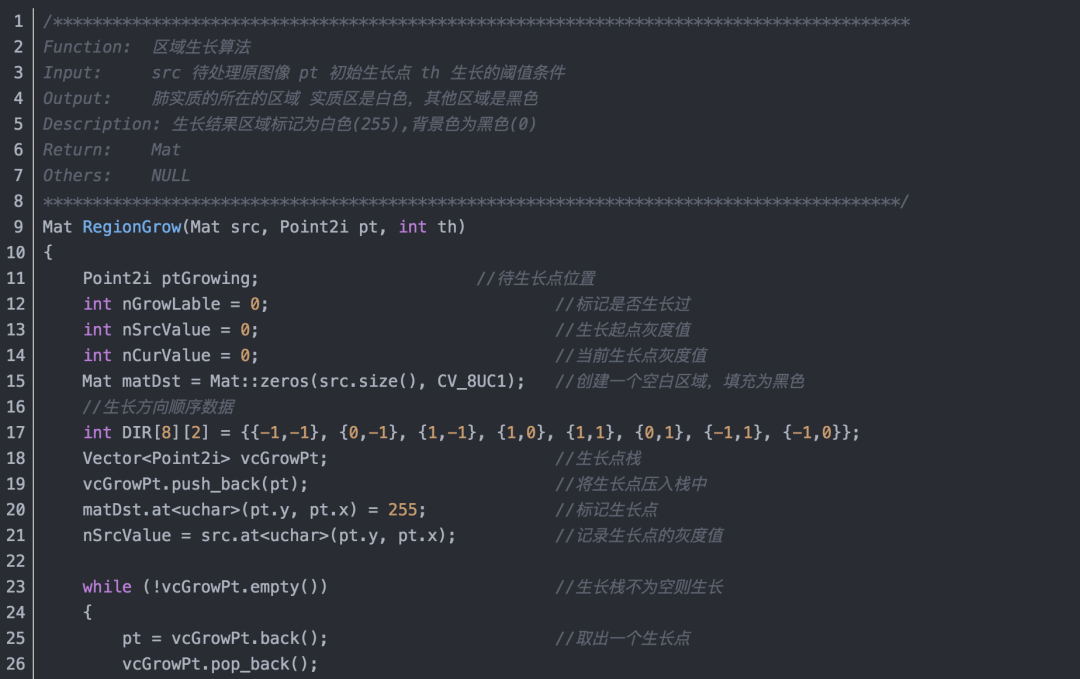
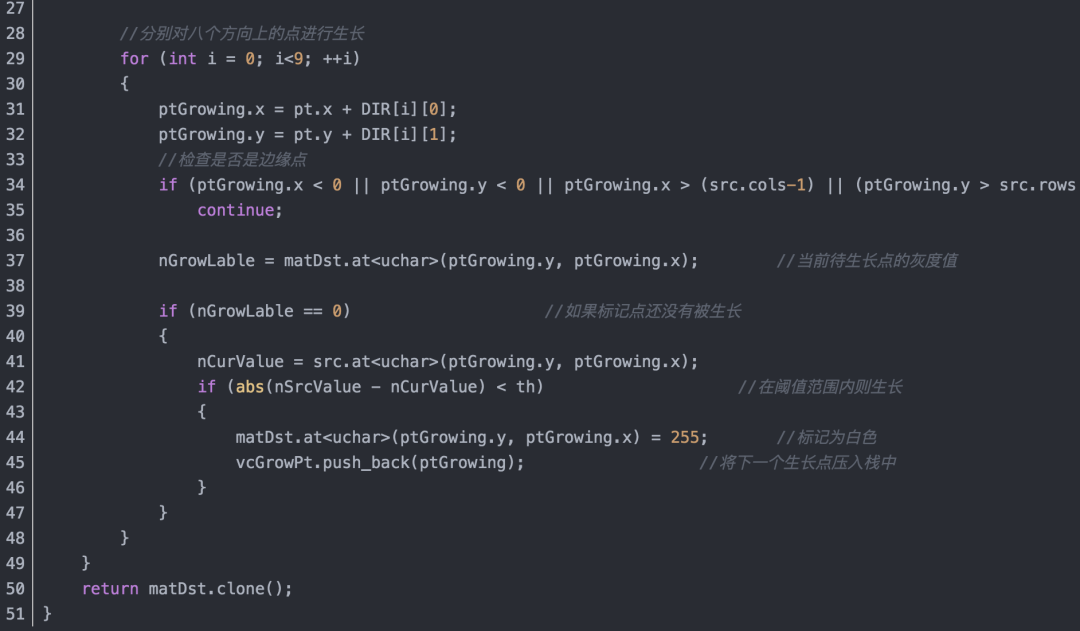
灰度差值的区域生长算法实现
算法实现的步骤:
a> 创建一个空白的图像(全黑);
b> 将种子点存入vector中,vector中存储待生长的种子点;
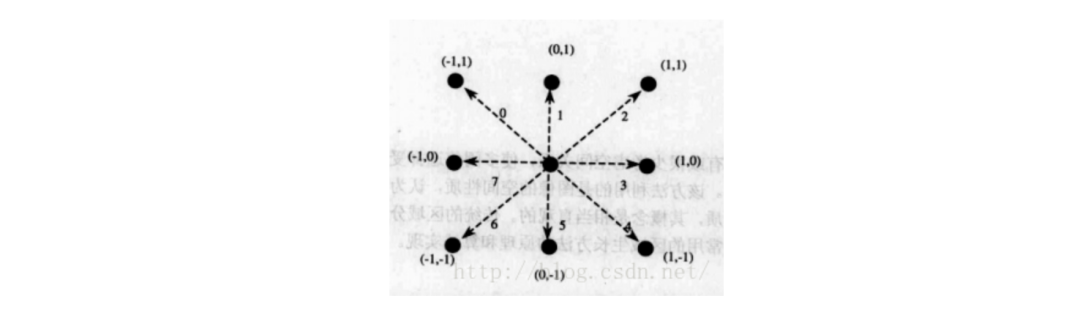
c> 依次弹出种子点并判断种子点如周围8领域的关系(生长规则),相似的点则作为下次生长的种子点;
d> vector中不存在种子点后就停止生长。
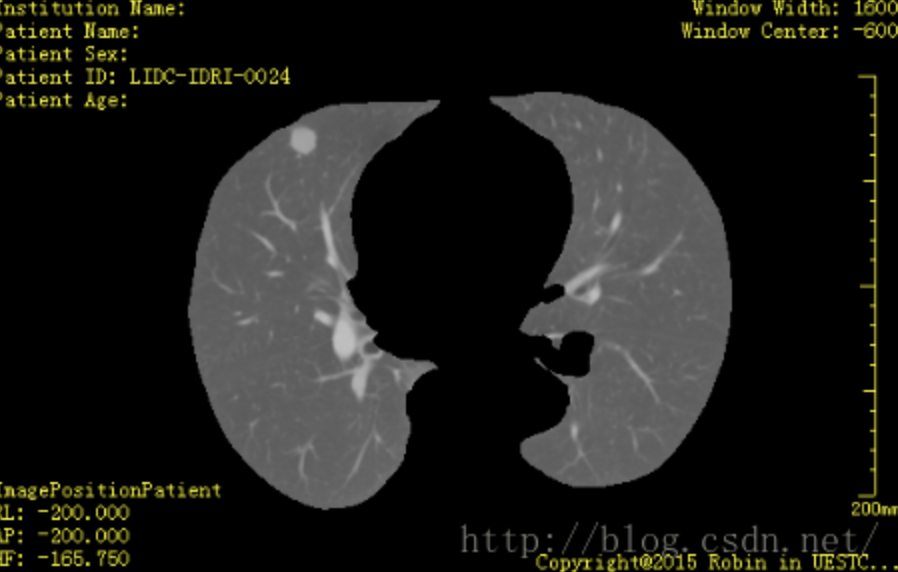
贴图看看使用该算法的图像处理效果:
首先对原图像进行二值化:
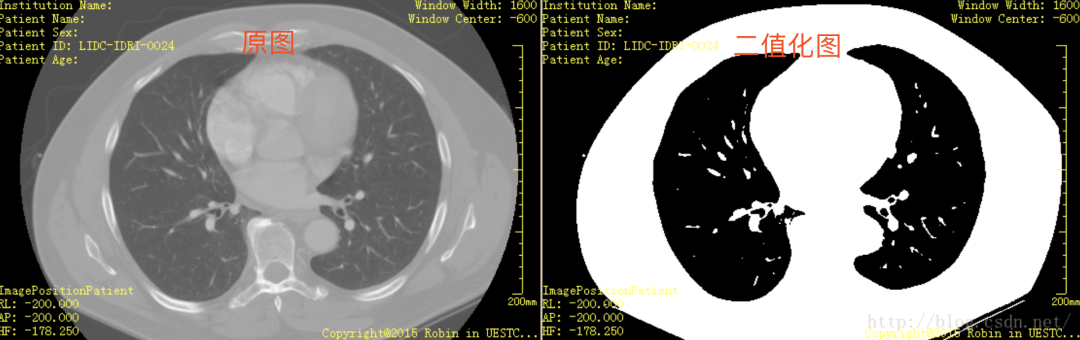
得到种子点的方法这里就不用介绍了,这个不是该算法的重点。得到两个种子点(左右肺),分别使用区域生长算法得到左右肺区,然后与原图进行与运算,得到结果:
分水岭算法原理
灰度图像可以被看成拓扑平面,灰度值高的区域可以看出山峰,灰度值低的区域可以看成是山谷。向每一个山谷当中灌不同颜色的水。水位升高,不同山谷的水会汇合,为防止不同山谷的水汇合,小在汇合处建立起堤坝。然后继续灌水,然后再建立堤坝,直到山峰都掩模。构建好的堤坝就是图像的分割。
此方法通常会得到过渡分割的结果,因为图像中的噪声以及其他因素。为了减少此影响,opencv使用基于标记的分水岭算法,此算法要设置哪些山谷中的汇合点,哪些不是。这是一种交互式的图像分割算法那。我们要给已知对象打上不同表情。如果某个区域肯定是前景或对象,就使用某个颜色或灰度值标签标记它。如果是背景那么使用其他颜色进行标记,其余不能确定的部分用0标记。然后使用分水岭算法,每次灌水,标签会被更新,当两个不同颜色的标签相遇就会构建堤坝,知道所有山峰掩模,最后得到的边界对象值是-1。
python 代码:
对挨在一起的对象进行分割。

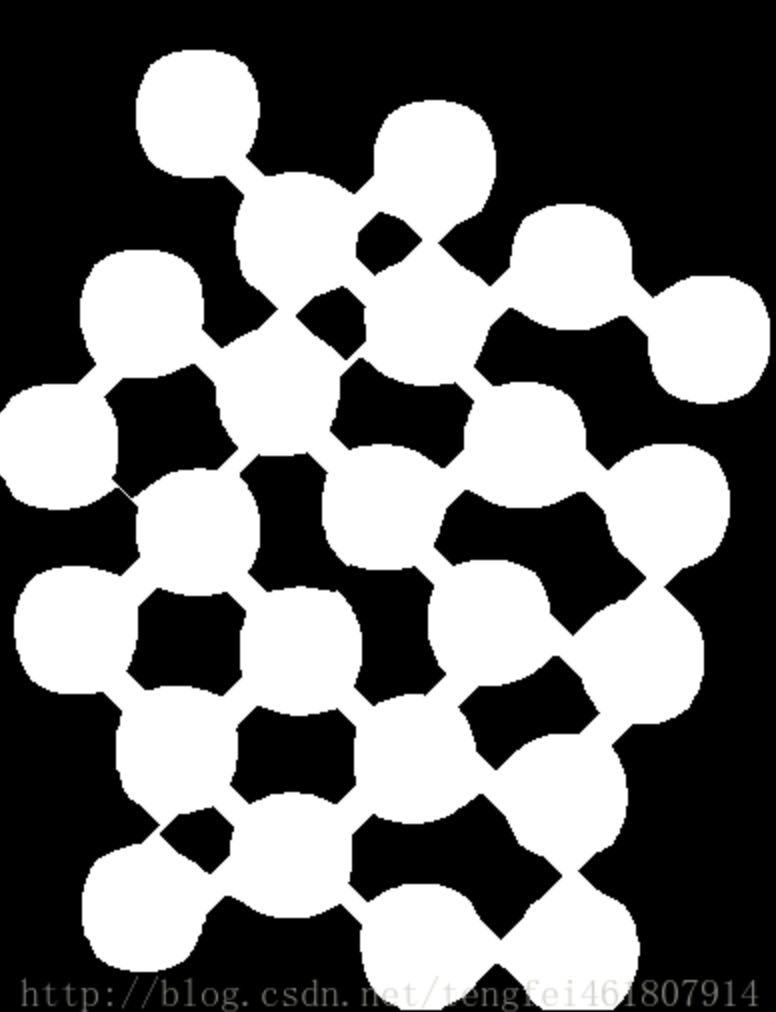
使用Otsu’s 二值化后的结果为
要出去图像中的白噪声。可以使用形态学运算,使用闭运算去除对象中的空洞。
靠近对象中心的区域是前景,离对象远的区域是背景,不确定的区域是边界。
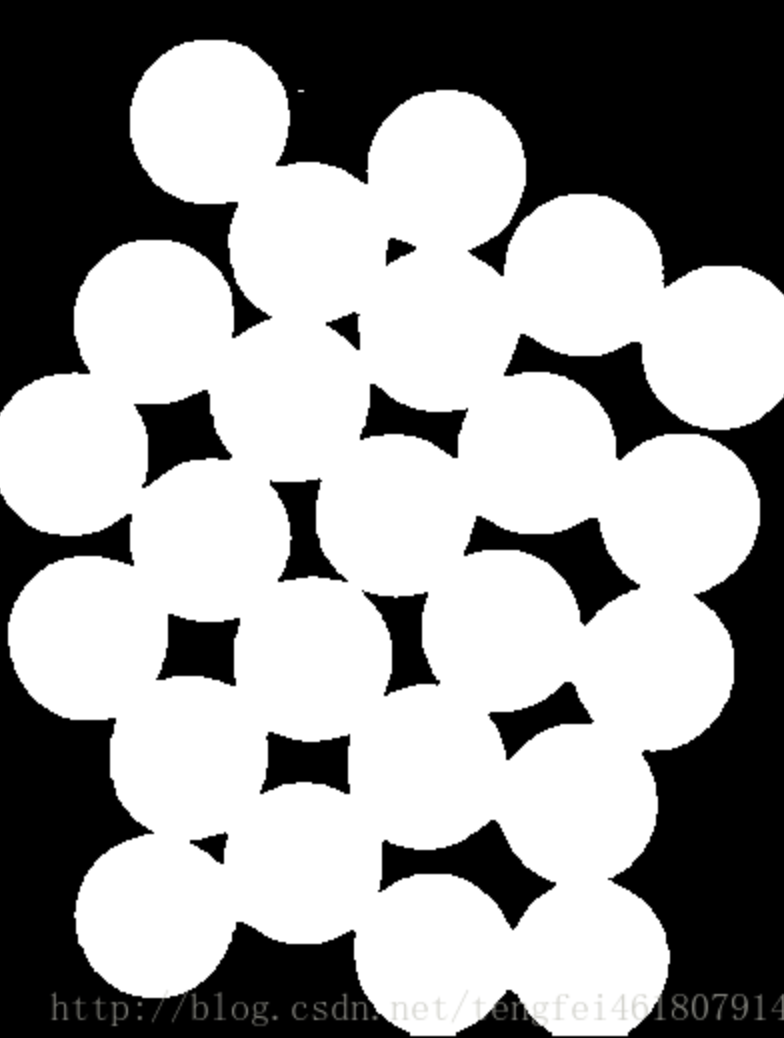
首先提取硬币区域,使用腐蚀操作去掉边缘,剩下的就是硬币。但硬币没有接触时,此方法有效,但是由于硬币相互接触,就要使用另外一种有效的方法:距离变换加上合适的阈值。
之后,要寻找不确定是否是硬币的区域。这里需要膨胀操作。膨胀操作会将对象边界延伸到背景当中。由于边界区域被去除,现在就能知道哪些区域是前景,哪些是背景。
余下的区域不知道如何区分,那么使用分水岭算法。这些区域通常是前景与背景的交界处。从能否确认是否是背景的区域中减去确定是前景的区域就得到了边界。
(前景和背景)
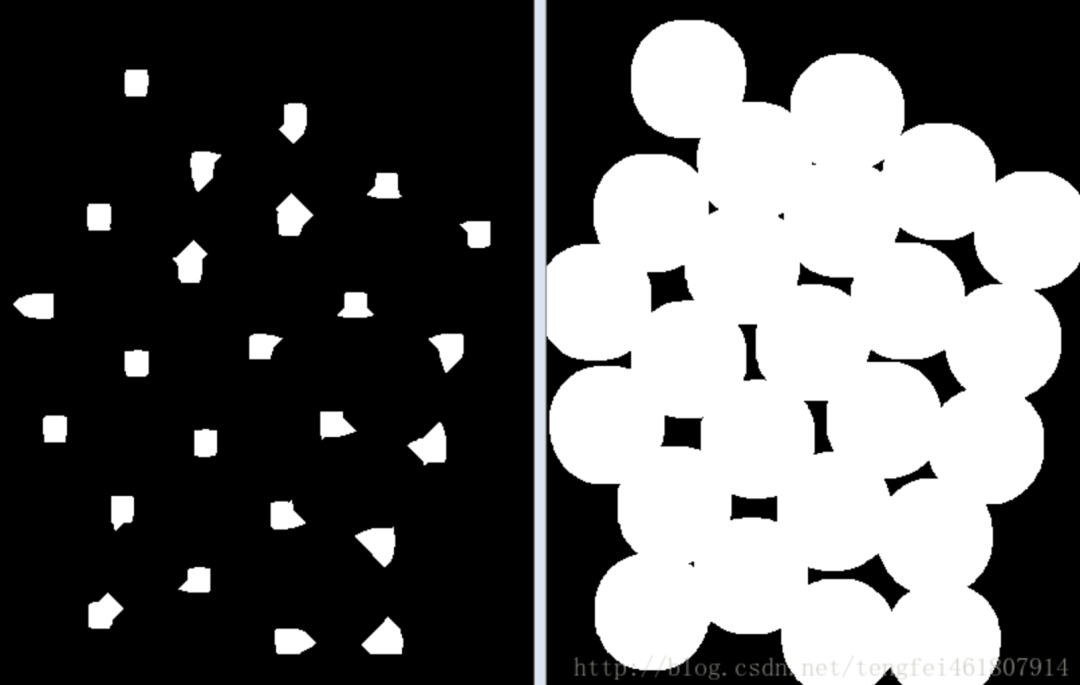
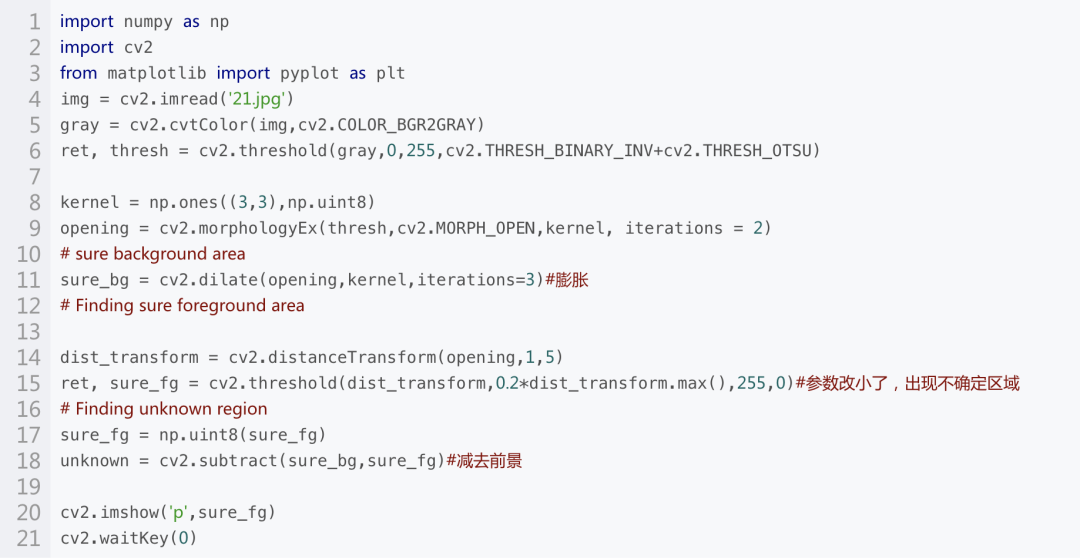
(上面的图是直接使用作者的代码后生产的结果,提取到了前景,为了演示一下不确定的区域,调了一下计算前景的距离变换的参数,使得中间出现不确定的区域)
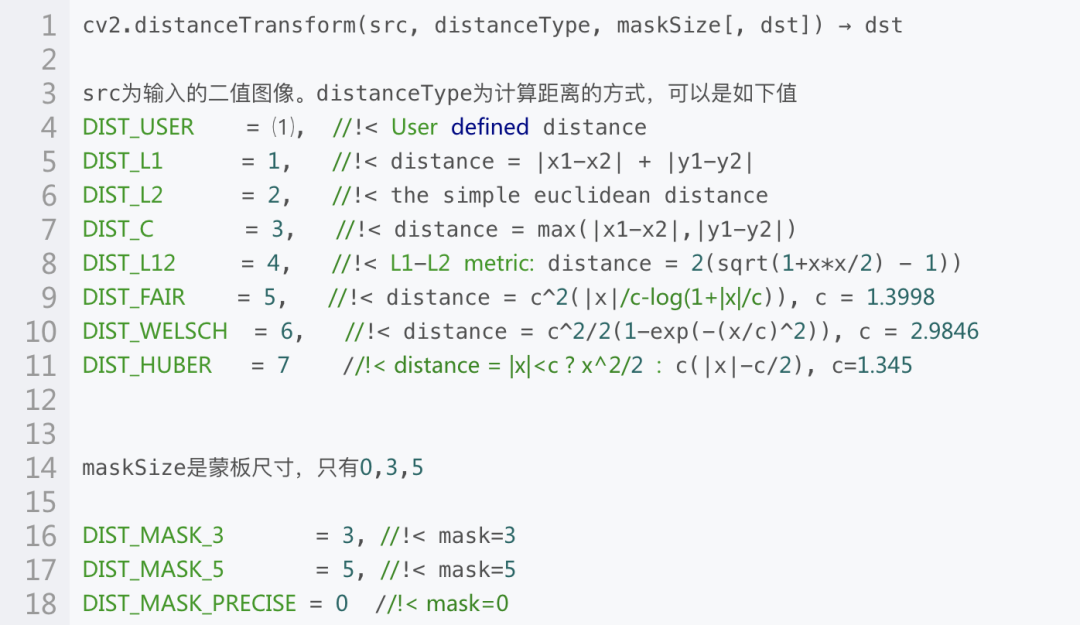
这里面使用个cv2.distanceTransform函数
该函数用于计算2值图象中所有像素离其最近的值为0像素的近似距离。
参数为
完整代码
现在知道了那些背景是硬币,可以创建标签。(与原图像大小相同,数据类型为int32的数组)。
对于已经确定分类的区域,也就是背景和前景,使用整数标记,不确定的区域是用0标记。可以使用cv2.connectedComponents()函数来实现此功能。它会将背景标记为0,其他标记为位从1开始的正整数。
但是,如果背景标记为0,那么分水岭算法会将其当成位置区域,所以使用不同的整数进行标记,对于不确定的区域,函数标记为0.
结果使用JET颜色地图表示。深蓝色未知区域,硬币区域使用不同颜色。其余部分用浅蓝色。
使用分水岭算法
效果不错

 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
