
基于正交投影的点云局部特征
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达
由于点云具有无序,不规则,无拓扑结构的特点,因此可以利用多个二维图像通过三维到二维投影来表示三维点云的几何特征。用图像表示特征可以提供稳定的信息,多个投影角度可以弥补投影过程中造成的信息丢失投影,实现对空间信息的解码。充分利用三维空间信息取决于三维物理坐标系统的建立,但传感器的坐标系统没有抵抗旋转的能力。
本文将介绍了一种基于正交投影的点云局部特征描述方法。
点云的局部特征提取主要分为两类:
非局部参考系(Non-Local Reference Frame,NLRF)特征,主要使用局部几何属性的统计信息作为特征表达式,例如SI和FPFH。由于这种特征会丢弃空间信息,因此存在描述能力不足的缺陷。
相反,局部参考框架(Local Reference Frame,LRF)特征首先在点云的局部表面上建立本征LRF,然后基于LRF解码几何信息,例如PS和RoPS。
LRF是独立于世界坐标系的局部坐标系。一方面,它使基于其解码的特征具有刚体变换不变性;另一方面,它为特征描述提供了足够的空间信息。最近的一项评估研究表明,大多数公共数据库中基于LRF的特征的性能要优于不基于LRF特征。
文章[1]介绍了一种称为正交投影的方法,以获得有效,鲁棒和高效的特征描述。为了建立稳定的LRF,描述符使用围绕关键点设置的邻域的一部分来计算其法线向量,并将该向量用作LRF的z轴,LRF的x轴由所有邻域点的投影向量之和决定。
为了获得对抗噪声,数据分辨率变化和遮挡的鲁棒性,该方法为每个投影矢量分配权重,通过矢量交叉乘法直接获得LRF的y轴。对于特征表达,从每个邻点到虚拟平面的距离或局部深度用于从角度表示局部几何信息
给定点云P中的任何关键点p,在点p构造的LRF的数学表达式为:

其中x(p)和z(p)是Lp的x轴和z轴,而y轴可以通过矢量叉乘获得。对于z轴,为了获得鲁棒性以解决点云分辨率变化,传统的k个最近邻点被丢弃,并使用球面邻点。z轴的具体计算如下:
首先,放置一个半径为r的球体,其中p为中心。
球体中的所有点(p除外)都定义为点p的球面邻点。这些邻点构成局部曲面
然后,选择Q的子集以计算z轴。具体来说,Q中所有到p的欧几里德距离小于r_z的点构成一个新点集
最后,对Qz进行协方差分析
其中,s是Qz中的点数,是Qz的重心。
计算与Cov(Qz)的最小特征值相对应的特征向量n(p)作为p的法线向量。由于法线向量具有符号歧义性,请删除其符号歧义性并按如下方式计算z轴:
其中k是半径邻居的数量。
确定z轴后,下一步是计算x轴。将p相对于z(p)的切平面标记为L,然后将所有邻点投影到平面L上,并为每个邻点qi计算一个投影矢量

基于这些投影向量,L平面上所有向量的向量和用于计算x轴:
其中,是与qi和p之间的距离有关的权重:

并且,是与qi到L的投影距离有关的权重:

最后,可以从x轴和z轴之间的叉积获得LRF的y轴。
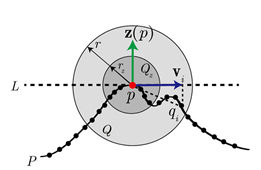
红色点,绿色箭头和蓝色箭头分别表示局部表面中的关键点,z轴和关键点的示例半径邻居的投影矢量。有关变量的表示形式,请参见文献[1]
建立局部坐标系后,将基于局部坐标系来表征局部表面的几何信息和空间信息。
首先相对于LRF变换局部表面Q,以实现刚性变换的不变性。旋转的表面由表示

然后在LRF中定义多个视点平面,以达到完全表征几何信息的目的。具体地,在LRF中,选择分别与距离为r的LRF的xy,yz和xz平面平行的三个正交视平面。换句话说,在LRF系统中部署的三个视平面的方程式分别定义为z − r = 0,x − r = 0和y − r = 0。
选择视点平面后,将针对Q'中相对于xy,yz和xz平面的每个邻点计算局部深度特征:
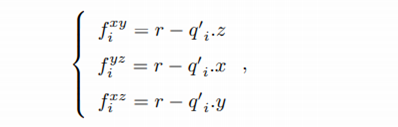
其中,q'i.x、q'i.y和q'i.z分别表示q'i的x值,y值和z值。将Q′中的点分别投影到这三个视点平面上,并且基于二维点统计在每个视点平面上捕获aw×w图像I。I中的每个像素的值被定义为与分散在像素网格中的点集中的点相对应的最大局部深度值。
最后,局部表面由三个图像(Ixy,Iyz,Ixz)表征。为了快速组合这些子特征,直接使用级联方法将它们合并为一维向量,并形成最终的3×w×w维TOLDI特征。
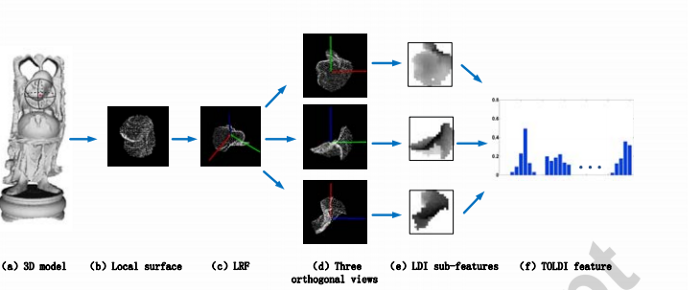
(a)中的红色点表示3D模型中的关键点,关键点周围的球体内部的点构成局部曲面。
参考文献
1.Jiaqi Yang, Qian Zhang, Yang Xiao, Zhiguo Cao.TOLDI: an effective and robust approach for 3D local shape description
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~