
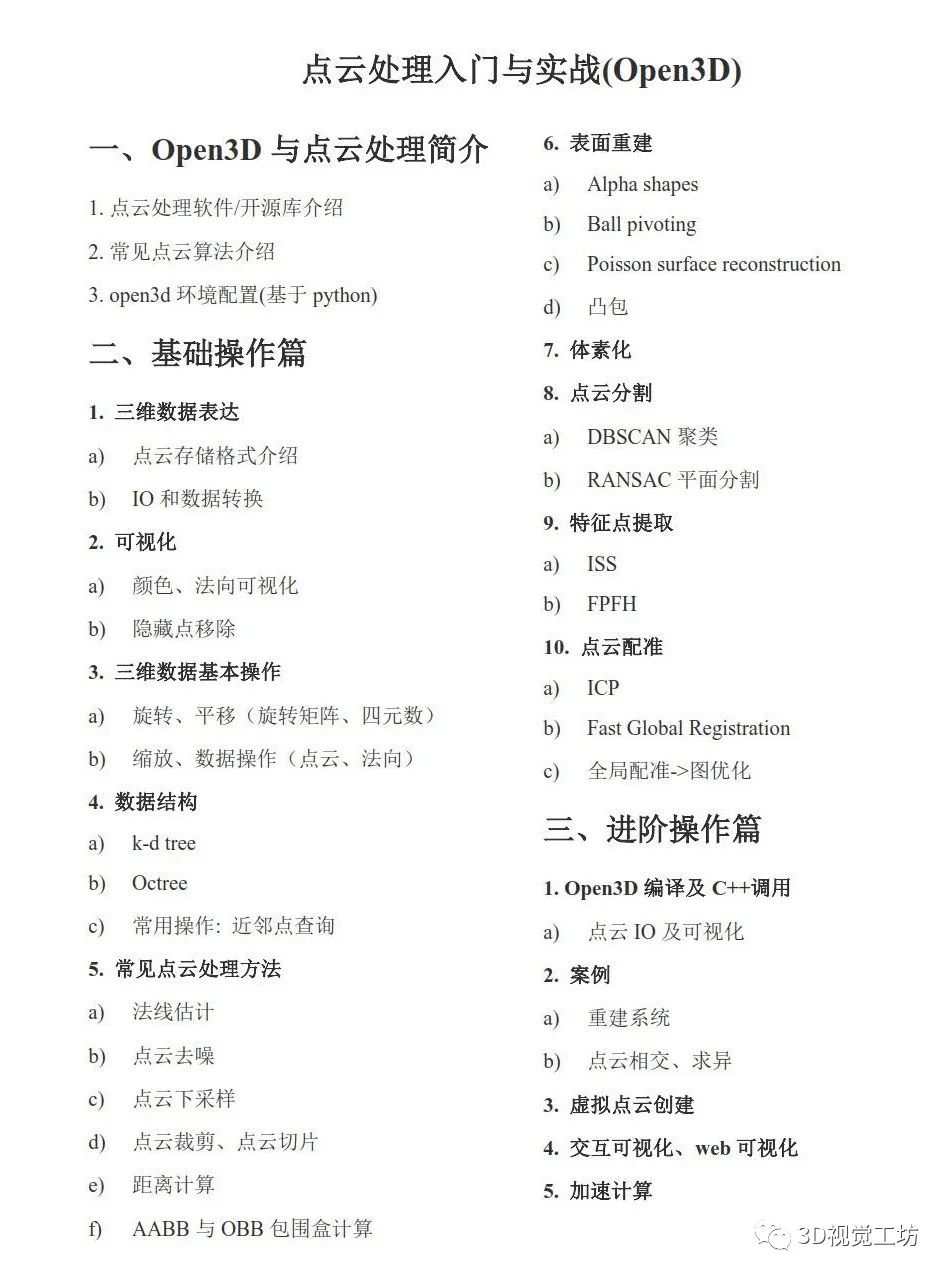
彻底搞懂基于Open3D的点云处理教程!
目前针对点云的第三方库有很多种,如PCL、CGAL等。这些库均基于C++进行实现调用,然而初学者难以深入掌握C++语言,且网上资料参差不齐,使很多人从入门到放弃。Open3D是2018年开始发展的点云处理库,底层基于C++实现,提供Python语言的接口调用。依托于Python的简单易学习特性,Open3D库极易上手,能够让你专心的进行算法研究而不必过于担心编程技能。本课程依托于Open3D开源库,着重介绍点云数据处理的实战应用。
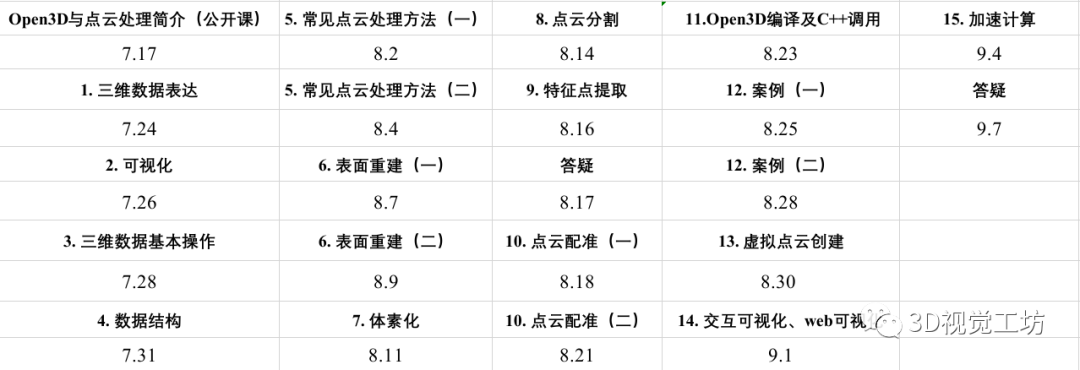
面向点云处理领域的基础工具课,主要以Python为编程主要语言,介绍Open3D库的使用方法。课程特点简单易用,快速上手点云数据处理,更加侧重于实战,涉及的话题包括点云的配准、去噪、采样、分割等,每个案例均提供源码进行实战。
1.方向为点云数据处理领域的基础人群,快速上手Open3D进行实战应用;
2.使用python作为点云数据处理的主要编程语言;
3.兼顾对C++ API的概要介绍,便于实现工业落地;
李子宽,南京航空航天大学计算机科学与技术博士,主要从事激光雷达数据处理与应用研究。国家奖学金获得者,多篇成果物被SCI、EI数据库收录。
李虎,资深3D视觉算法工程师,任职国内某独角兽公司,具有丰富的实战经验。
1.掌握点云数据处理基本理论和方法,掌握常见的点云配准、分割、聚类手段;
2.快速上手Python编程,培养利用Python进行点云处理的编程素养,能够独立进行算法分析和实现;
3.每节课均提供代码实现和详细注释,提供丰富的工具和轮子,方便进行拓展实现;
QQ咨询群:910070197
▲课程咨询QQ群,了解更多
评论