
基于局部表面特征在杂乱场景中的三维物体识别
论文地址:在公众号「3D视觉工坊」,后台回复「三维物体」,即可直接下载。
一 引言
二 相关工作
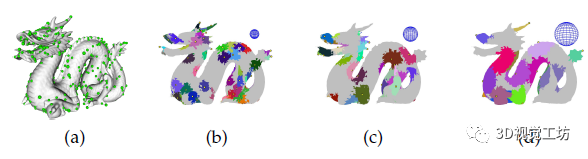
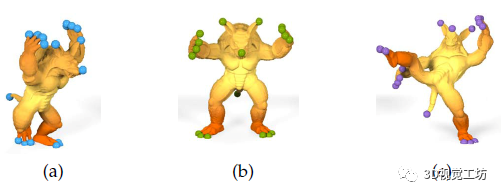
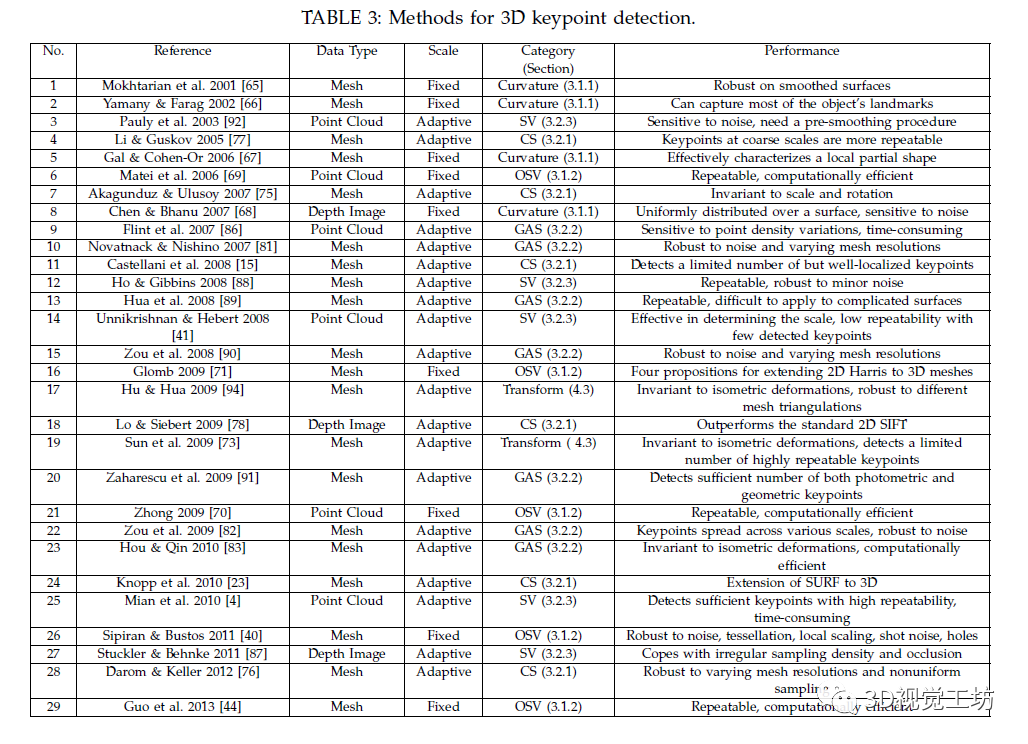
三 3D关键点检测
3.1 固定尺寸关键点的检测
3.1.1 基于曲率的方法
3.1.2 基于 (OSV)方法
3.2 自适应尺度关键点检测
3.2.1 基于坐标平滑的方法
3.2.2 基于几何属性平滑(GAS)方法
3.2.3 基于表面变化(SV)方法
结论
参考文献
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
评论