3D图像传感器的下一个发力点:dToF
来源:内容由半导体行业观察(ID:icbank)编译自「Skhynix」
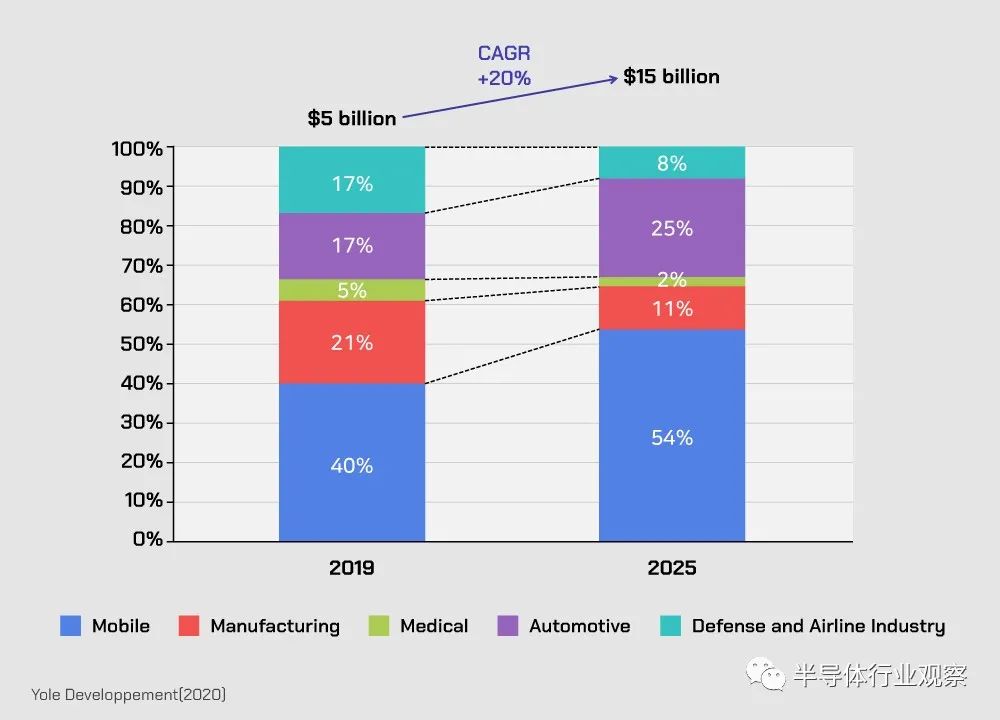
3D图像传感器:引领图像传感器市场的形态因素
3D图像传感器如何工作?
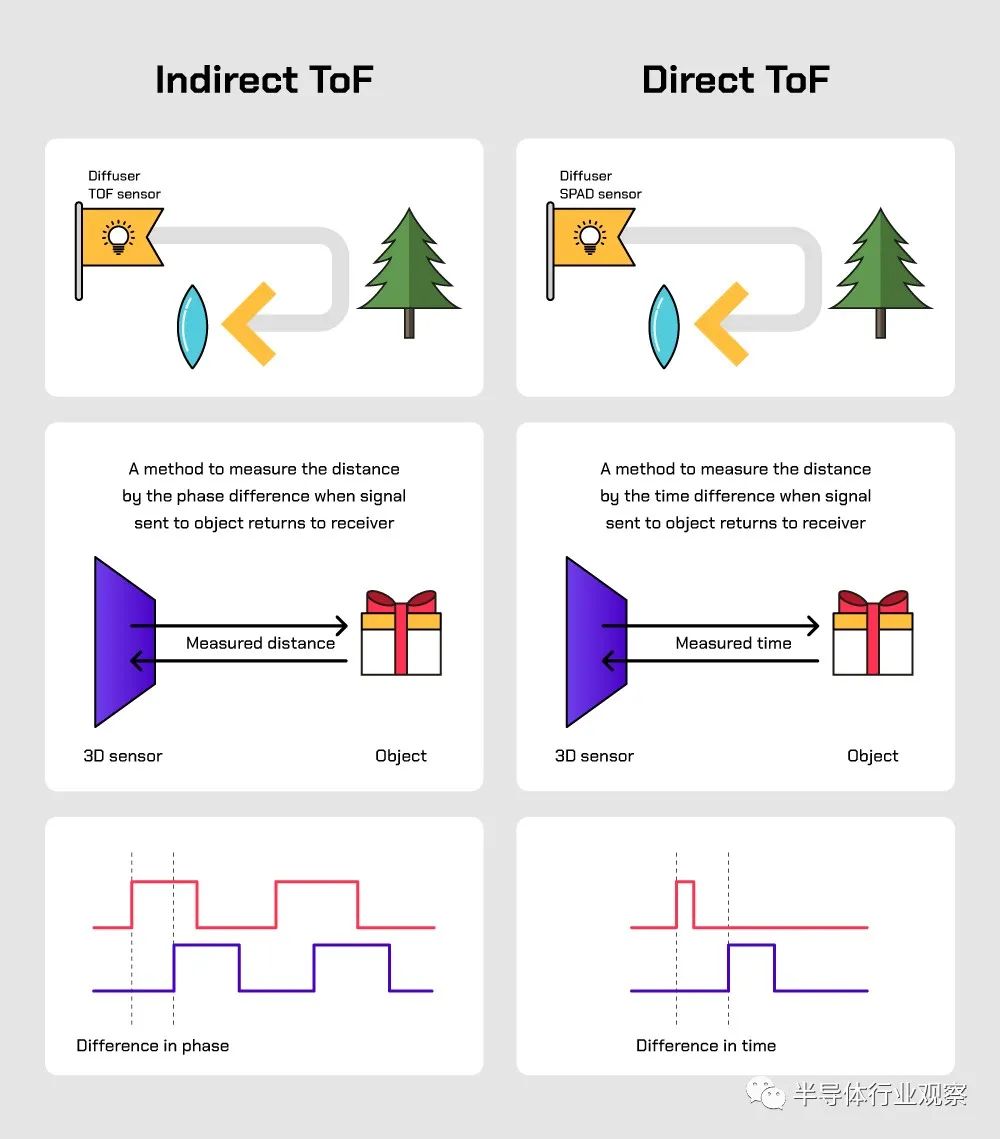
D-ToF:下一代3D图像传感器的关键
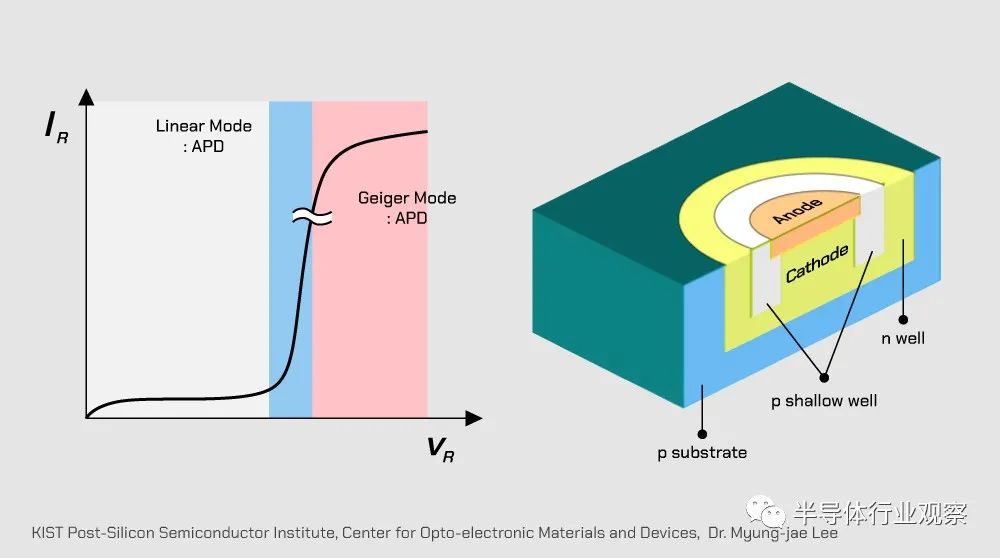
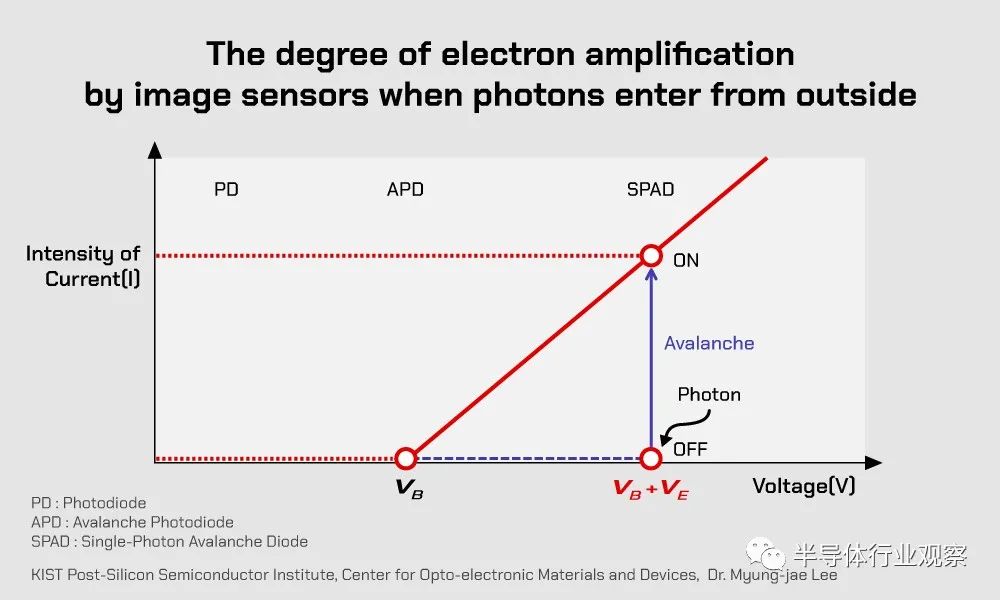
SPAD,D-ToF传感器的基本要素
 End
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。
评论
 下载APP
下载APP来源:内容由半导体行业观察(ID:icbank)编译自「Skhynix」
3D图像传感器:引领图像传感器市场的形态因素
3D图像传感器如何工作?
D-ToF:下一代3D图像传感器的关键
SPAD,D-ToF传感器的基本要素
End
声明:部分内容来源于网络,仅供读者学术交流之目的。文章版权归原作者所有。如有不妥,请联系删除。