
综述:图像计算传感器
极市导读
本文完整地梳理了图像传感器的进化历程。从半个世纪前Gene发明传感器基础单元开始,图像传感器越来越先进和复杂。它们不再只是能感知光信号的设备,而成为主动进行复杂处理的计算传感器。>>>极市七夕粉丝福利活动:炼丹师们,七夕这道算法题,你会解吗?
1 引子




Integrated arrays of storage mode detectors are suitable for application as image detectors. Under this broad classification are such applications as pattern recognition, print or photo readers , image tracking, and real-time surveillance. 存储模式检测器的集成阵列适合用作图像检测器。在这个广泛的领域下,有诸如模式识别、打印或照片浏览器、图像跟踪和实时监控等应用。

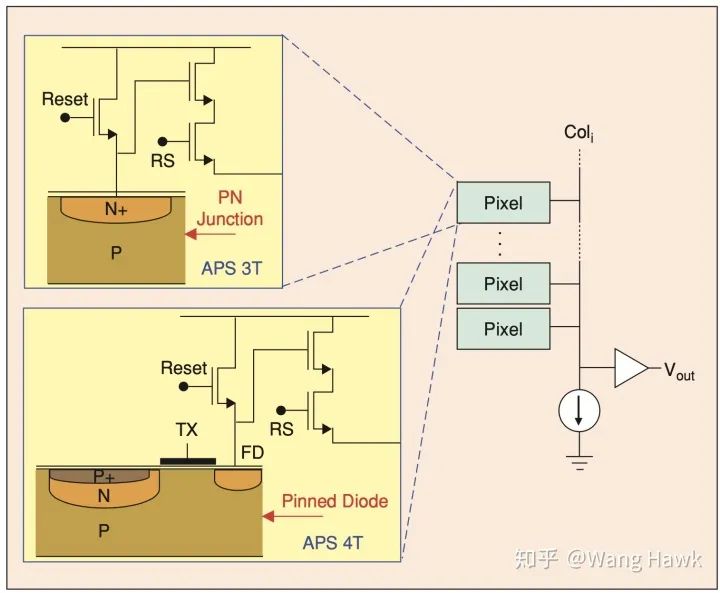
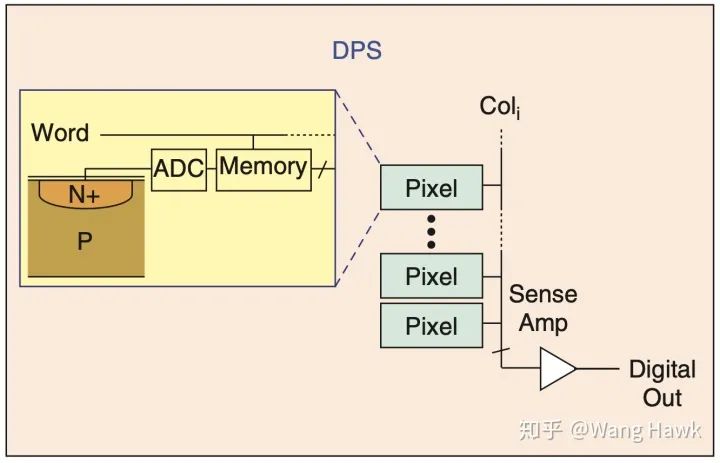
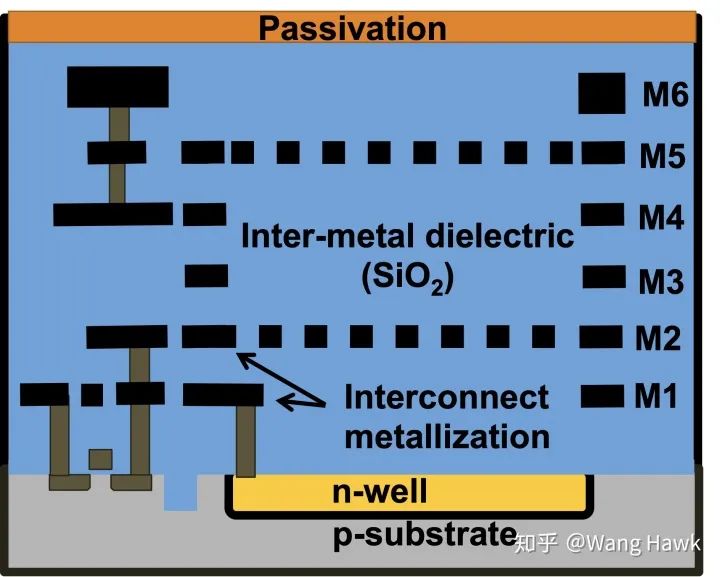
3 CMOS传感器的底层读取结构


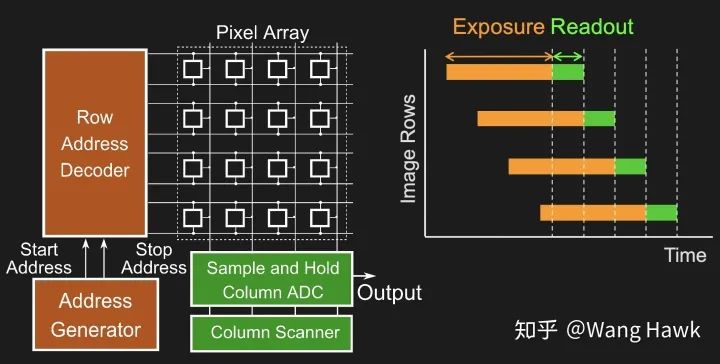
4 卷帘快门效应

五 编码卷帘快门



SenseTime 2018-present: Mobile Photography (SensePhoto) Build and lead a R&D team of 30 people, focusing on a complete product solution named SensePhoto, which is computational photography and computational imaging on mobile phones, including super-resolution, denoising, demosaicing, HDR video, soft ISP, face image enhancement, etc. Our clients include major OEMs including Vivo, Oppo, Xiaomi, and etc. The work is a joint collaboration with major vendors (e.g., Sony, Sunny Optics, and Qualcomm).
专注于手机计算摄影与计算成像的完整产品解决方案SensePhoto,包括超分辨率、去噪、去马赛克、HDR视频、软ISP、人脸图像增强等,客户包括Vivo、Oppo、小米等主要OEM厂商,与主要厂商(如Sony、Sunny Optics、高通等)共同合作。
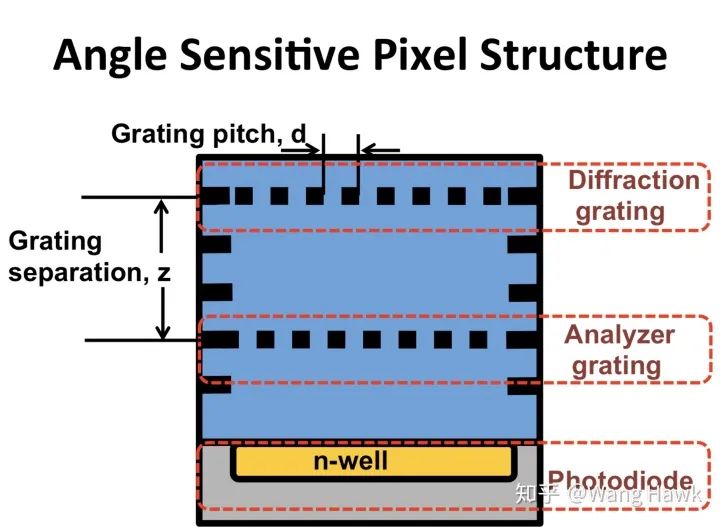
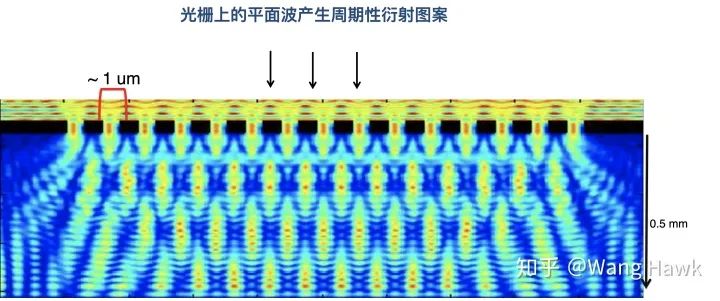
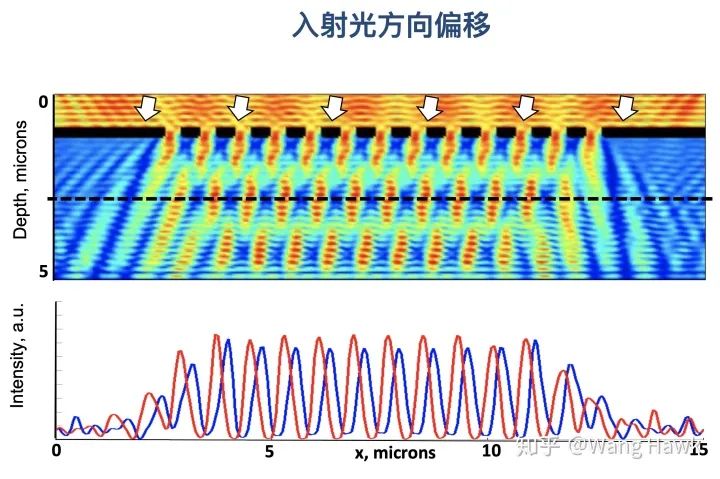
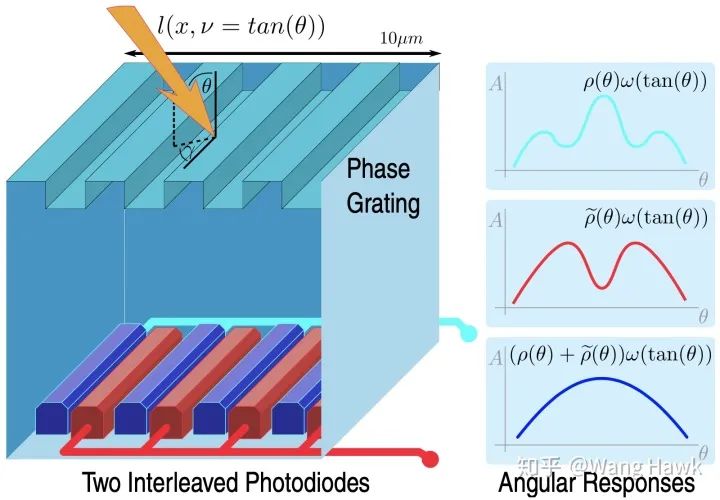
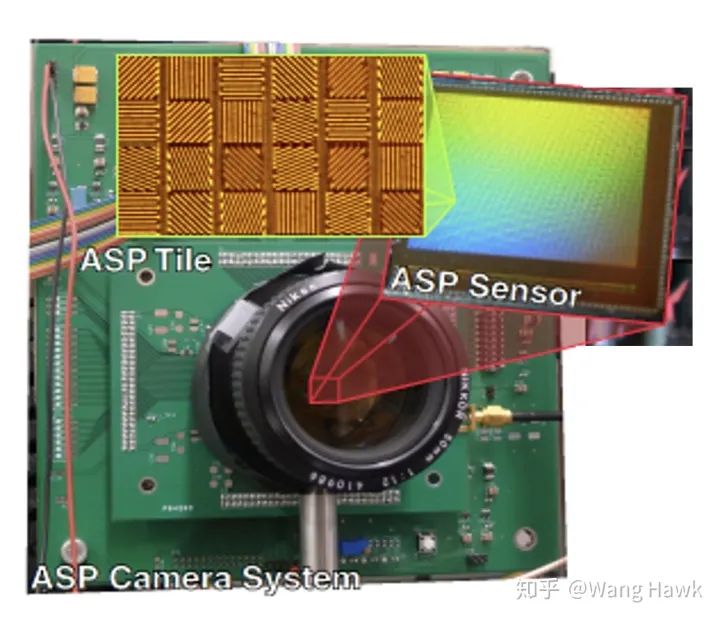
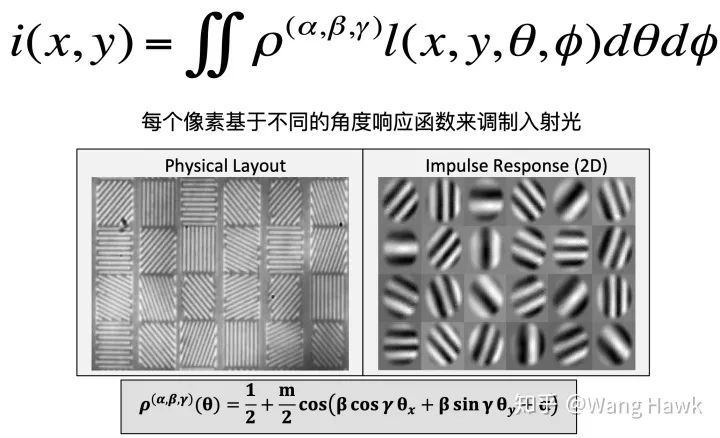
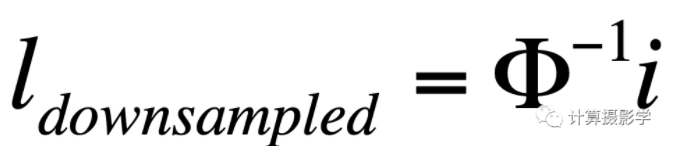
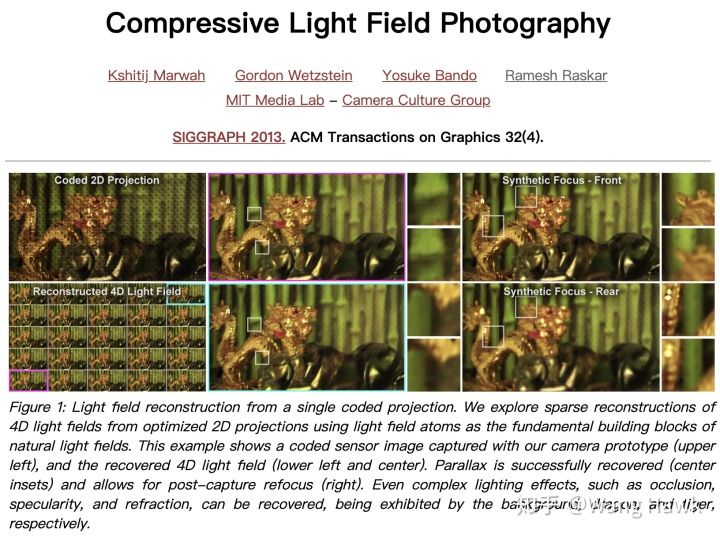
6 角度敏感像素结构及应用













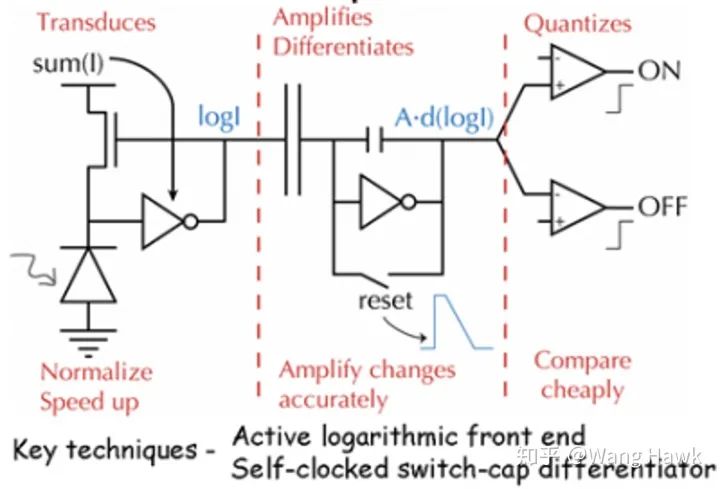
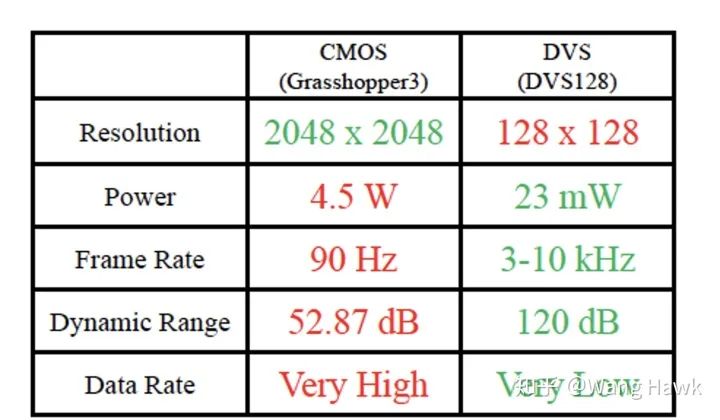
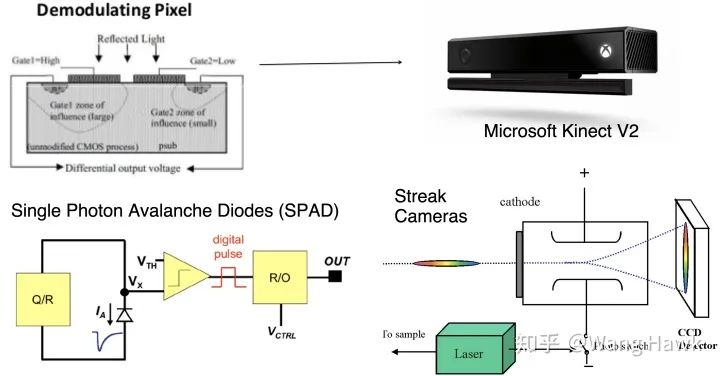
7 事件相机、TOF、以及模拟CNN传感器

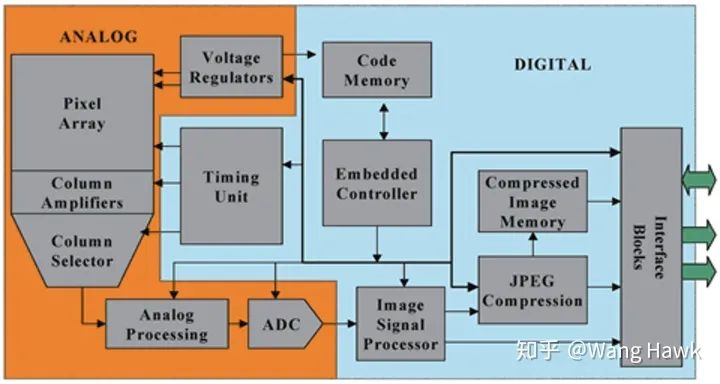

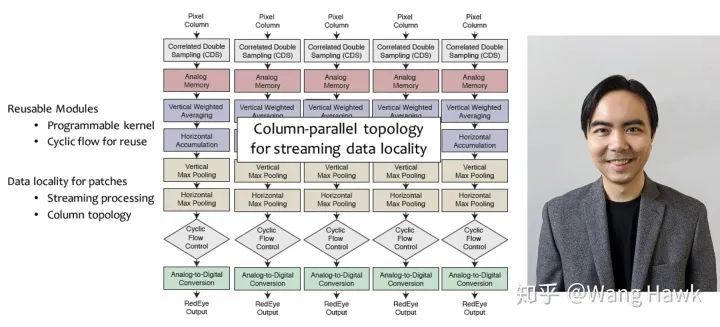
The RedEye vision sensor architecture extracts ConvNet features in the analog domain to reduce analog-digital sensor readout overhead. The architecture promotes focal plane scalability by localizing design complexity and promotes energy efficiency by analog noise admission. RedEye视觉传感器架构在模拟域中提取ConvNet特征,以减少模数传感器读出开销。该架构通过本地化设计复杂性来提高焦面可扩展性,并通过模拟噪声接纳来提高能效。
8 总结
9 参考文献
你一定从未看过如此通俗易懂的YOLO系列(从V1到V5)模型解读! 1行代码搞定Latex公式编写,这个4.6M的Python小插件,堪称论文必备神器 使用注意力机制来做医学图像分割的解释和Pytorch实现

评论