
RGBD相机的标定和图像配准
点击下方卡片,关注“新机器视觉”公众号
重磅干货,第一时间送达
作者 | ljc_coder @CSDN
链接 |
https://blog.csdn.net/m0_52785249/article/details/124505848
本篇内容为本人观看视频的学习笔记,仅供学术交流
1
kinect2相机简介
1、三种主要相机类型

2、常见的RGB-D相机

3、kinect2 相机
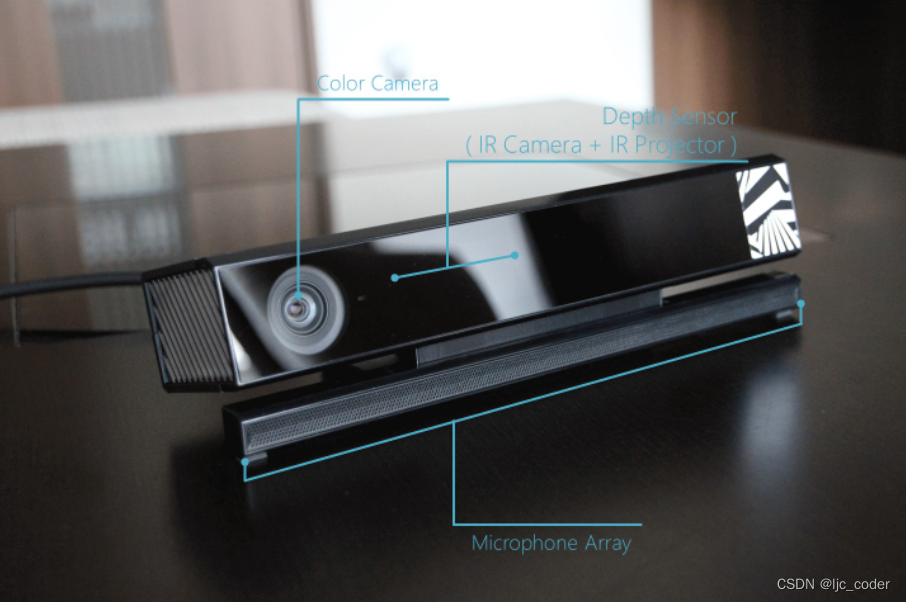
3.1使用RGB-D相机的好处
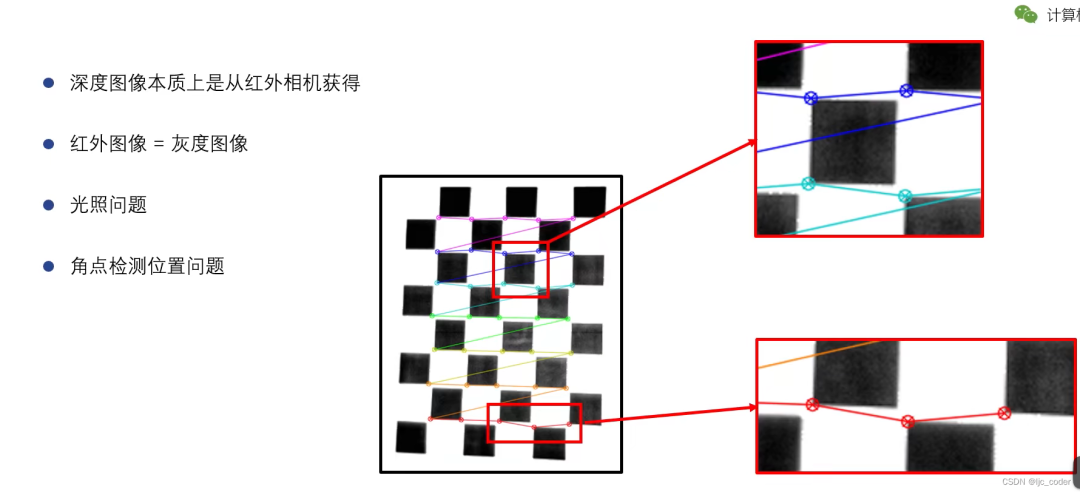
3.2问题
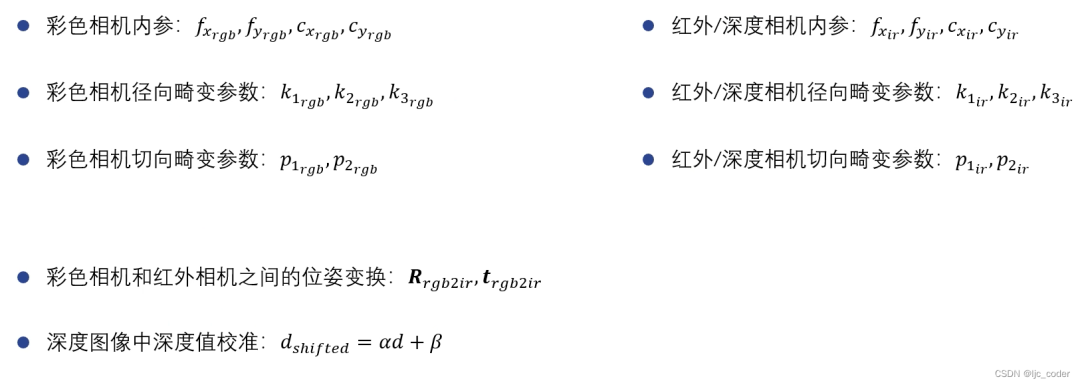
3.3实际标定得到的数据
2
内外参标定
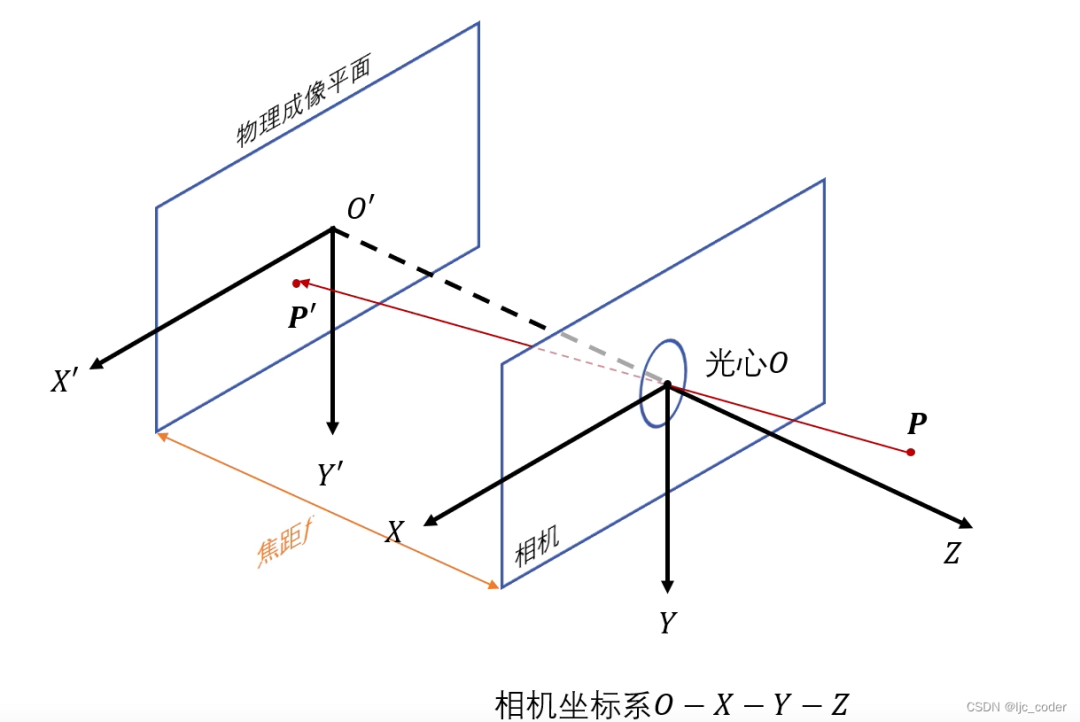
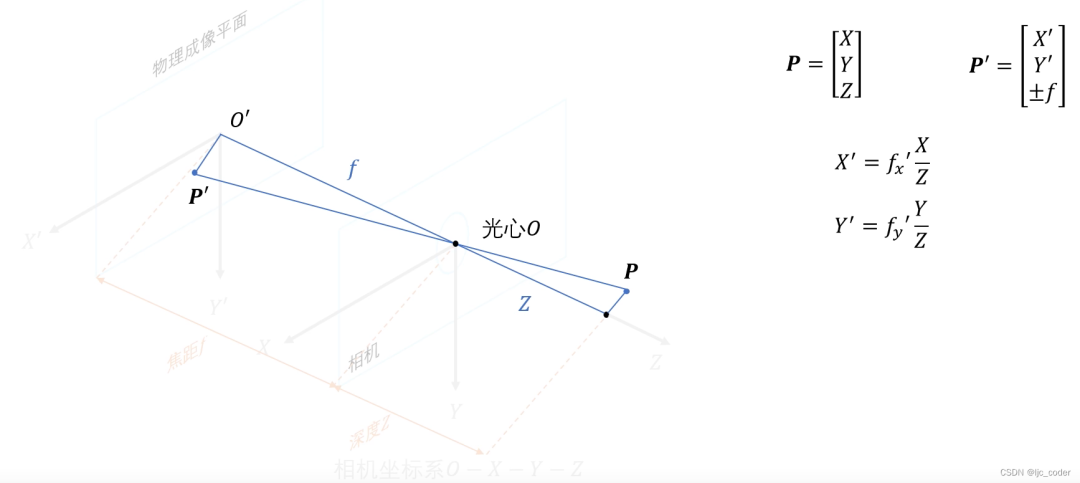
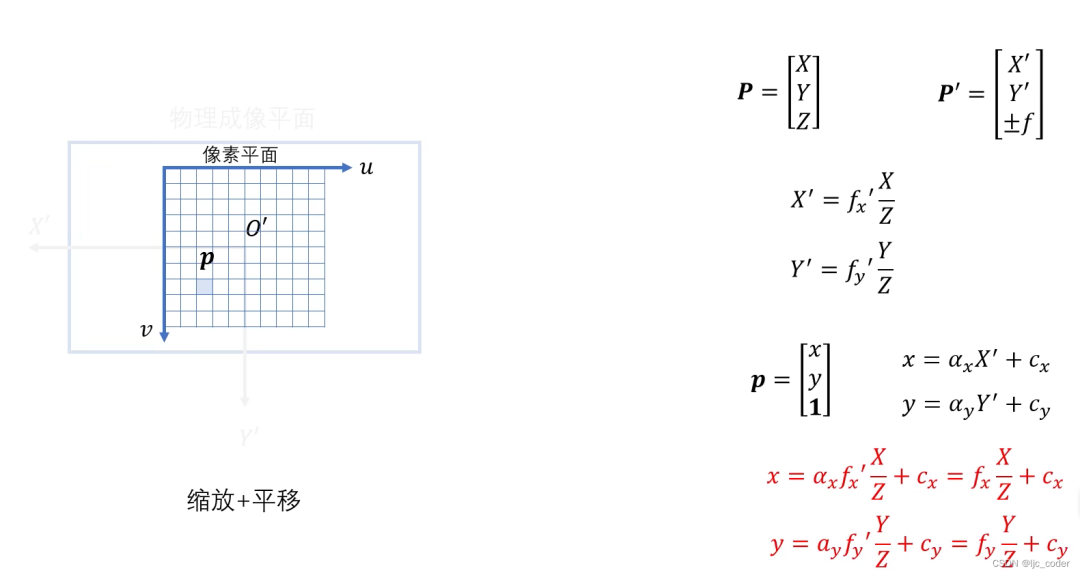
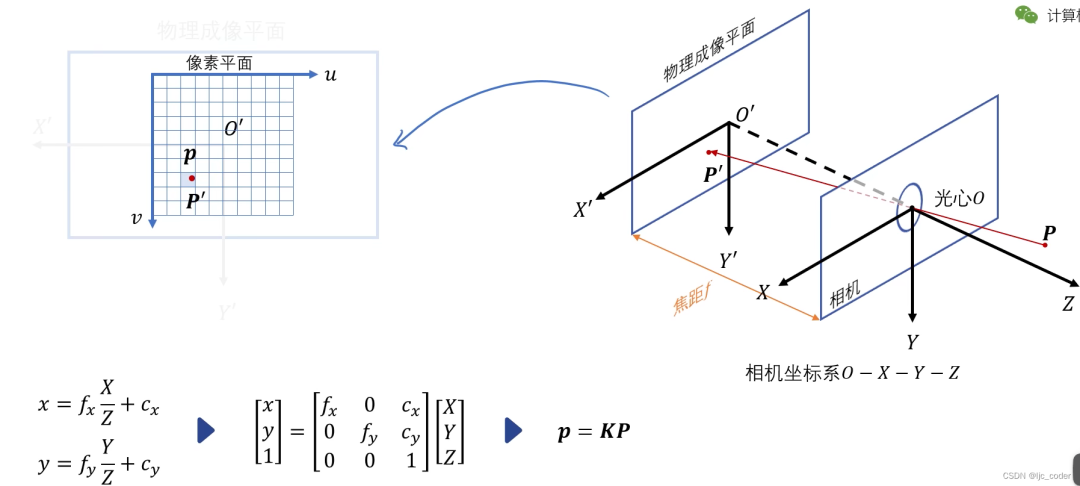
1、针孔相机投影模型
主要通过k1,k2,k3三个参数来描述相机的径向畸变(常用k1,k2就够了)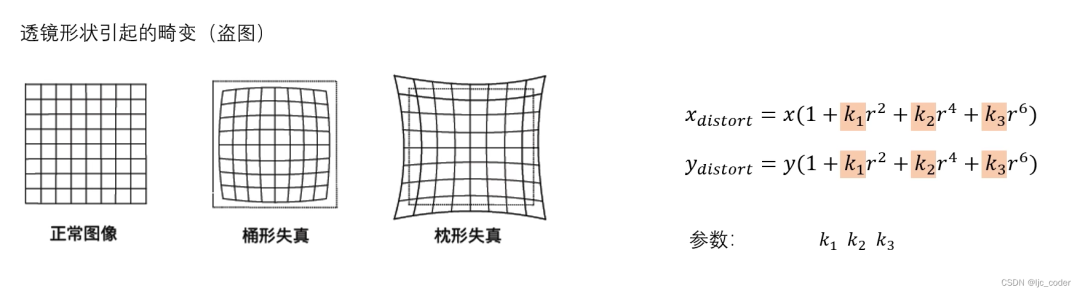
对于切向畸变,一般使用p1,p2来描述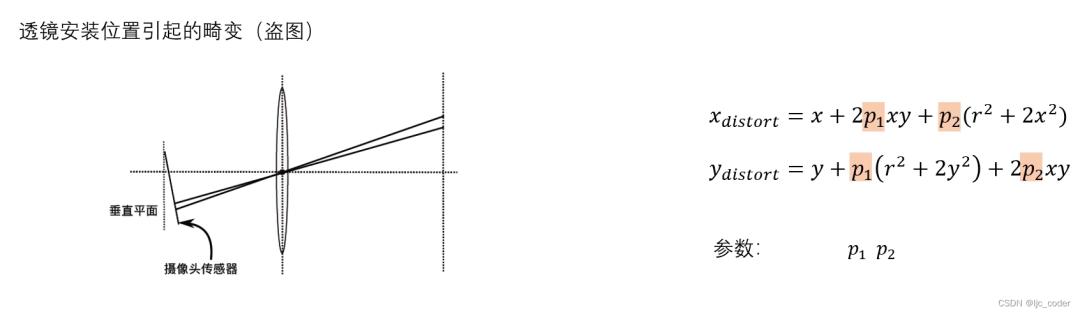
2、工具
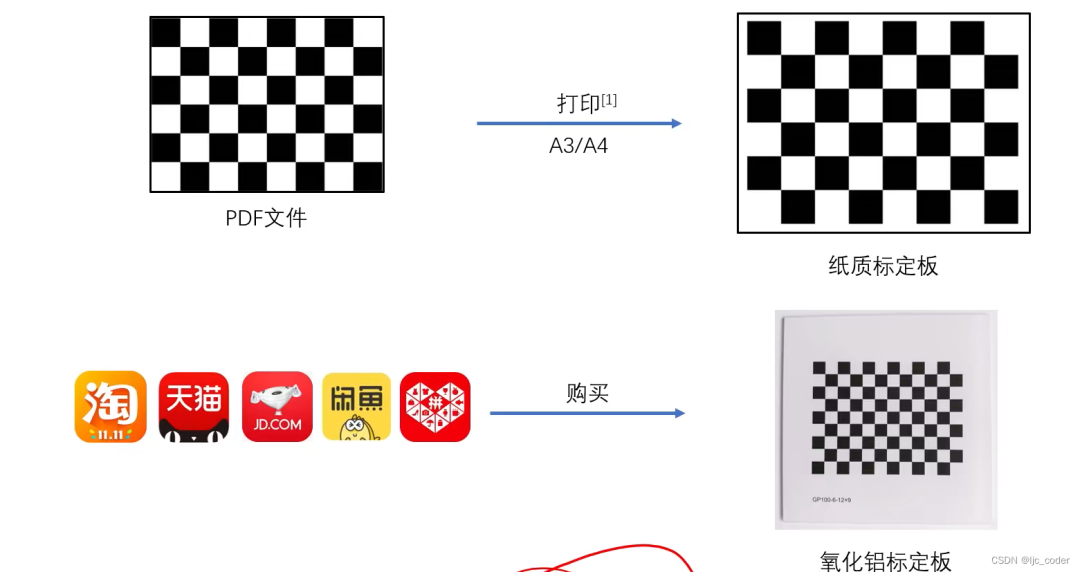
3、棋盘标定板
4、彩色相机标定
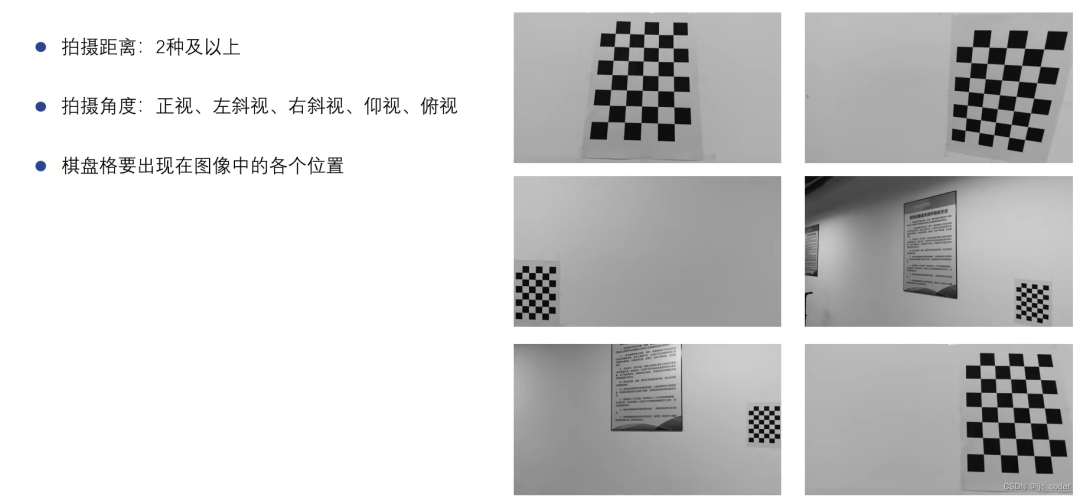
5、红外相机标定
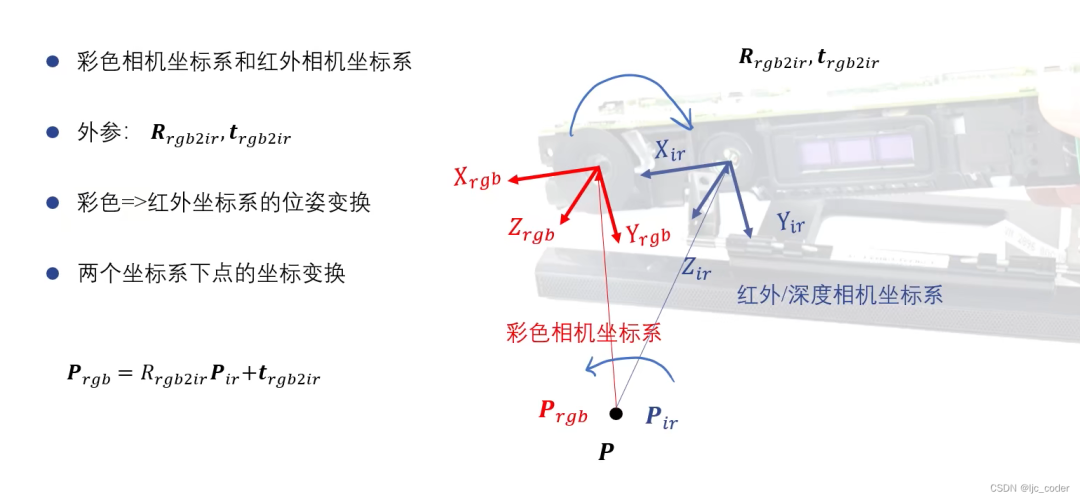
6、彩色相机和红外相机的外参标定
3
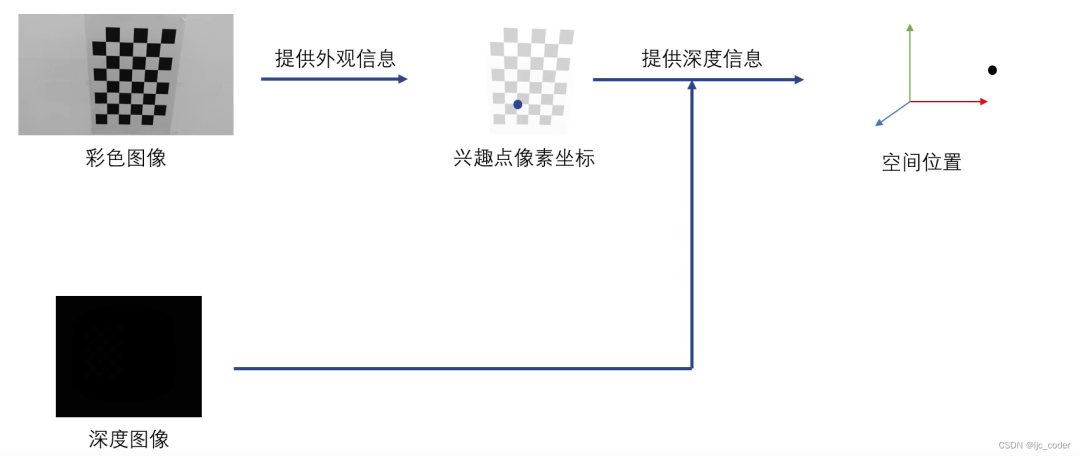
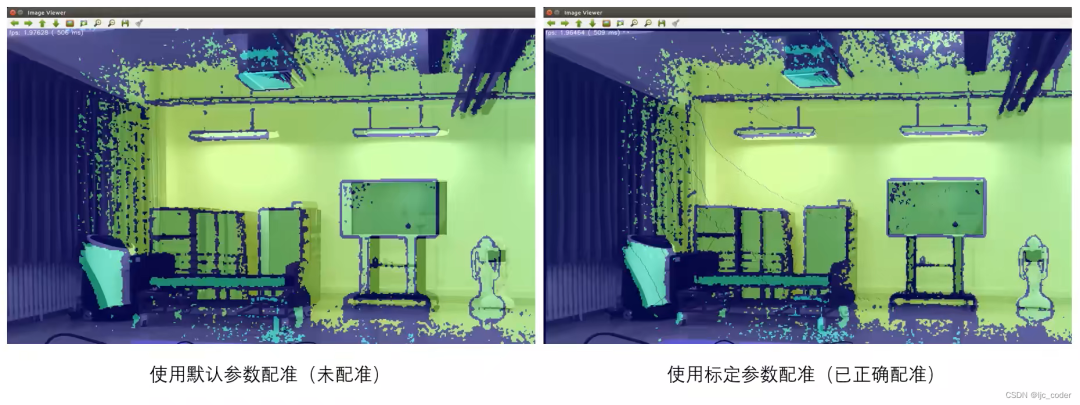
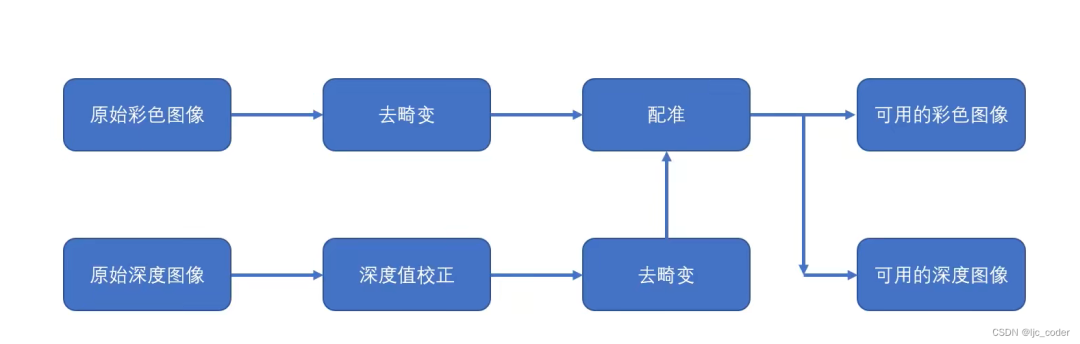
图像配准
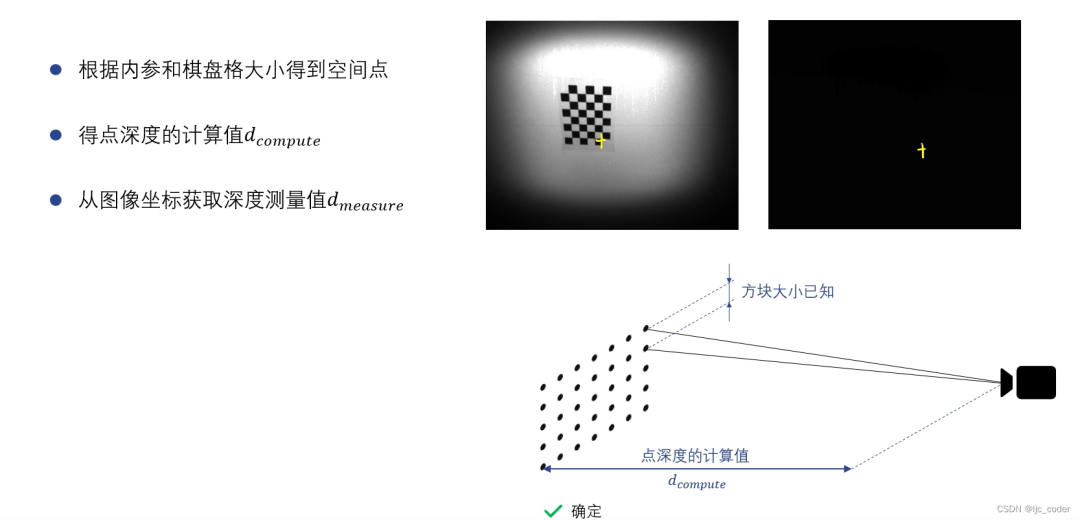
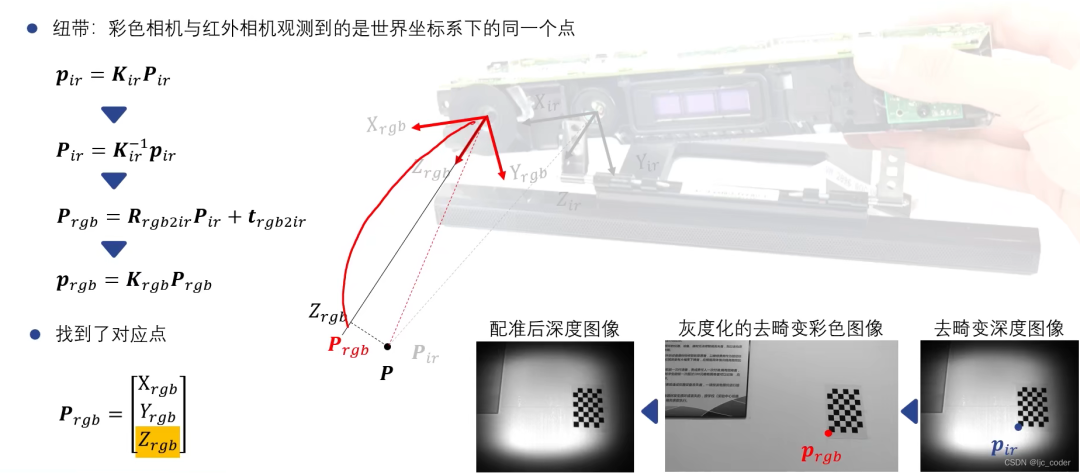
1、配准原理
4
总结
版权声明:本文为作者授权转载,仅做学术分享,未经授权请勿二次传播,版权归原作者所有。
本文仅做学术分享,如有侵权,请联系删文。
评论